Until April 28, 2020 in Germany you have to keep at least 1.5 m (4.9 feet) side distance while overtaking a bicyle. If you violated the law you're going to receive a fine (30 EUR/34 USD).
But how does the police check the side distances between a car and a bicyle? During my research I found an article about the Salzburg's police department. I wondered how the device works so I tried to build one by myself.
After The Idea
Due to german/european law I would have to censor every license plate and every person. Because of that I couldn't record a video in action. But it's working well.
I would like to have a 3d printed case but I don't have a 3d printer so I took a stable shoe box. For mounting it to my handlebars I used some GoPro stuff.
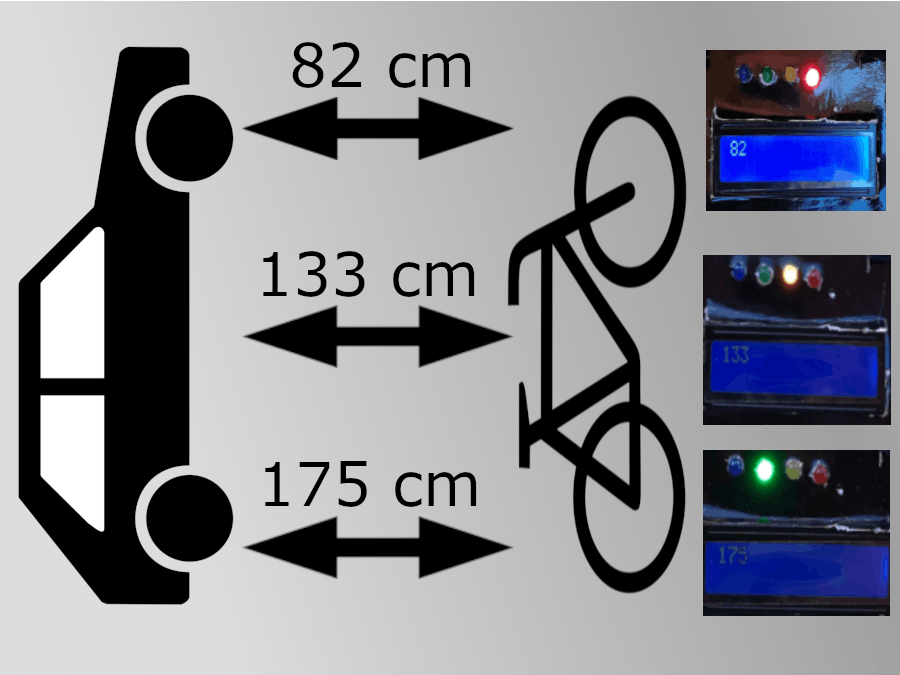
(on the left side is a wall aka car)
In the code I'm operating only with centimeters.
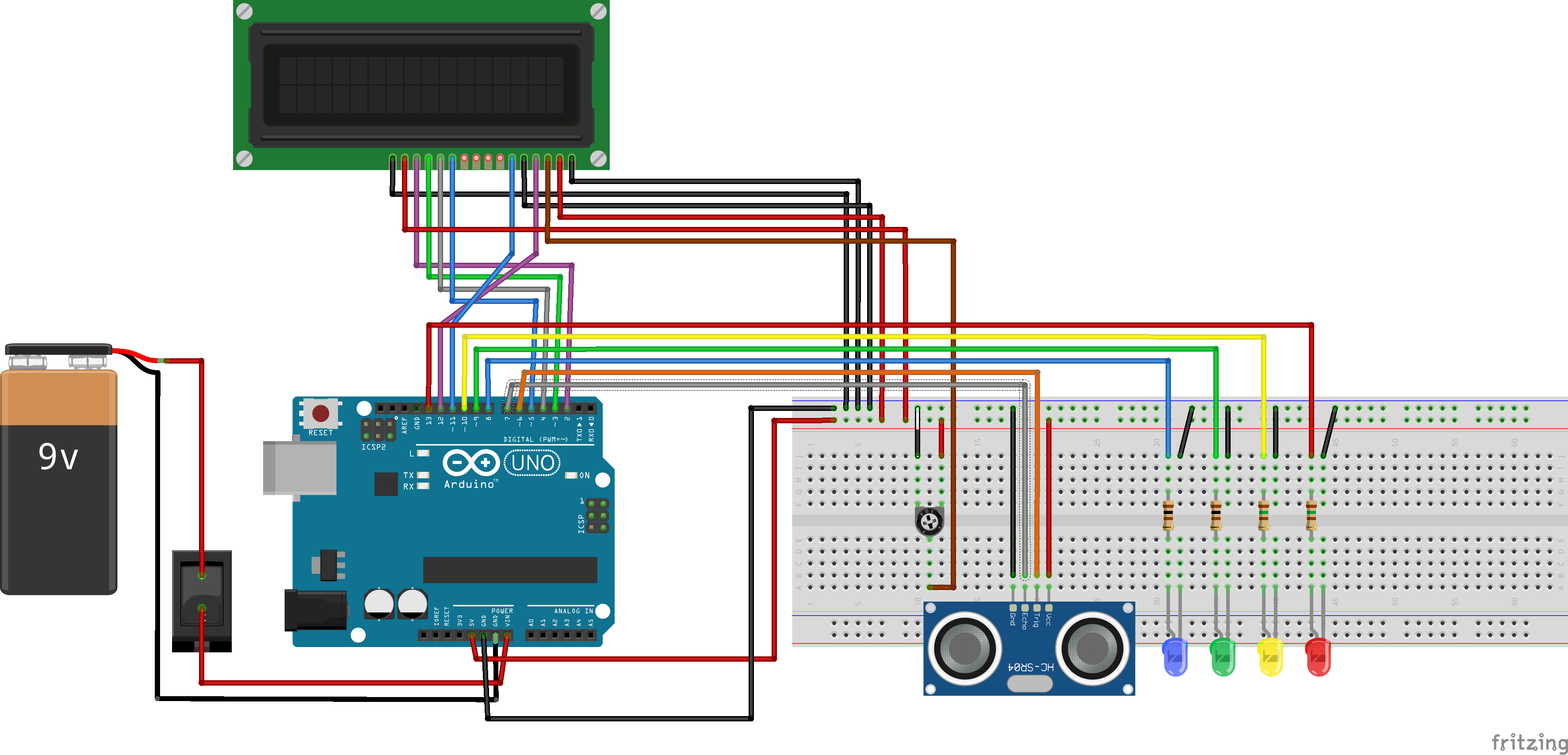
#include<LiquidCrystal.h>int trigger=7;
int echo=6;
int blue=8;
int green=9;
int yellow=10;
int red=13;
long distance,duration;
LiquidCrystallcd(12,11,5,4,3,2);
voidsetup(){
pinMode(trigger,OUTPUT);
pinMode(echo,INPUT);
lcd.begin(16,2);
pinMode(blue,OUTPUT);
pinMode(green,OUTPUT);
pinMode(yellow,OUTPUT);
pinMode(red,OUTPUT);
}
voidloop(){
lcd.clear();
digitalWrite(trigger, LOW);
delay(5);
digitalWrite(trigger, HIGH);
delay(10);
digitalWrite(trigger, LOW);
duration = pulseIn(echo, HIGH);
distance = ((duration/2) * 0.03432) - 20;
lcd.print(distance);
if(distance>400 || distance<30){ //failure or not making sense to measuredigitalWrite(blue,HIGH);
digitalWrite(green,LOW);
digitalWrite(yellow,LOW);
digitalWrite(red,LOW);
}elseif(distance<400 && distance>150){ //enough distancedigitalWrite(blue,LOW);
digitalWrite(green,HIGH);
digitalWrite(yellow,LOW);
digitalWrite(red,LOW);
}elseif(distance<150 && distance>100){ //too little distancedigitalWrite(blue,LOW);
digitalWrite(green,LOW);
digitalWrite(yellow,HIGH);
digitalWrite(red,LOW);
}elseif(distance<100 && distance>30){ //far too little distancedigitalWrite(blue,LOW);
digitalWrite(green,LOW);
digitalWrite(yellow,LOW);
digitalWrite(red,HIGH);
}
delay(100); //repeating fast enough to have a current value but slow enough having enough time to read the value}
Here some pictures:
1 / 5 • from front left
1 / 5
I was even able to drive normally without getting affected by the device.
#include<LiquidCrystal.h>inttrigger=7;intecho=6;intblue=8;intgreen=9;intyellow=10;intred=13;longdistance,duration;LiquidCrystallcd(12,11,5,4,3,2);voidsetup(){pinMode(trigger,OUTPUT);pinMode(echo,INPUT);lcd.begin(16,2);pinMode(blue,OUTPUT);pinMode(green,OUTPUT);pinMode(yellow,OUTPUT);pinMode(red,OUTPUT);}voidloop(){lcd.clear();digitalWrite(trigger,LOW);delay(5);digitalWrite(trigger,HIGH);delay(10);digitalWrite(trigger,LOW);duration=pulseIn(echo,HIGH);distance=((duration/2)*0.03432)-20;lcd.print(distance);if(distance>400||distance<30){//failure or not making sense to measuredigitalWrite(blue,HIGH);digitalWrite(green,LOW);digitalWrite(yellow,LOW);digitalWrite(red,LOW);}elseif(distance<400&&distance>150){//enough distancedigitalWrite(blue,LOW);digitalWrite(green,HIGH);digitalWrite(yellow,LOW);digitalWrite(red,LOW);}elseif(distance<150&&distance>100){//too little distancedigitalWrite(blue,LOW);digitalWrite(green,LOW);digitalWrite(yellow,HIGH);digitalWrite(red,LOW);}elseif(distance<100&&distance>30){//far too little distancedigitalWrite(blue,LOW);digitalWrite(green,LOW);digitalWrite(yellow,LOW);digitalWrite(red,HIGH);}delay(100);//repeating fast enough to have a current value but slow enough having enough time to read the value}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



















{kind=link}
Comments
Please log in or sign up to comment.