/******************************************************************************
* Project Name : CE211252_Ambient_Light_Sensing
* Version : 1.0
* Device Used : CY8C4A45LQI-L483
* Software Used : PSoC Creator 3.3 CP3
* Compiler Used : ARM GCC 4.9.3
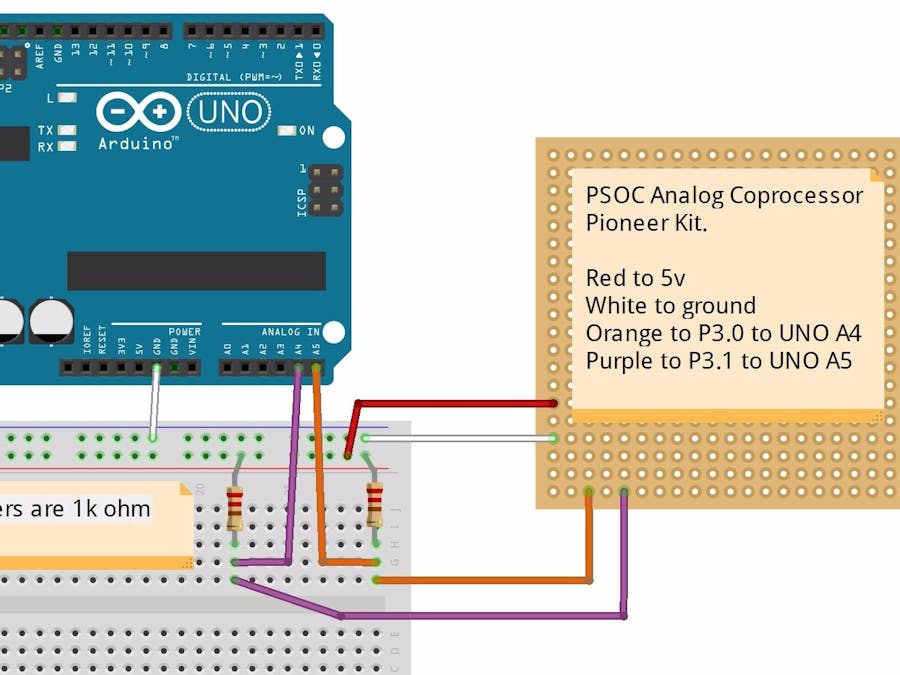
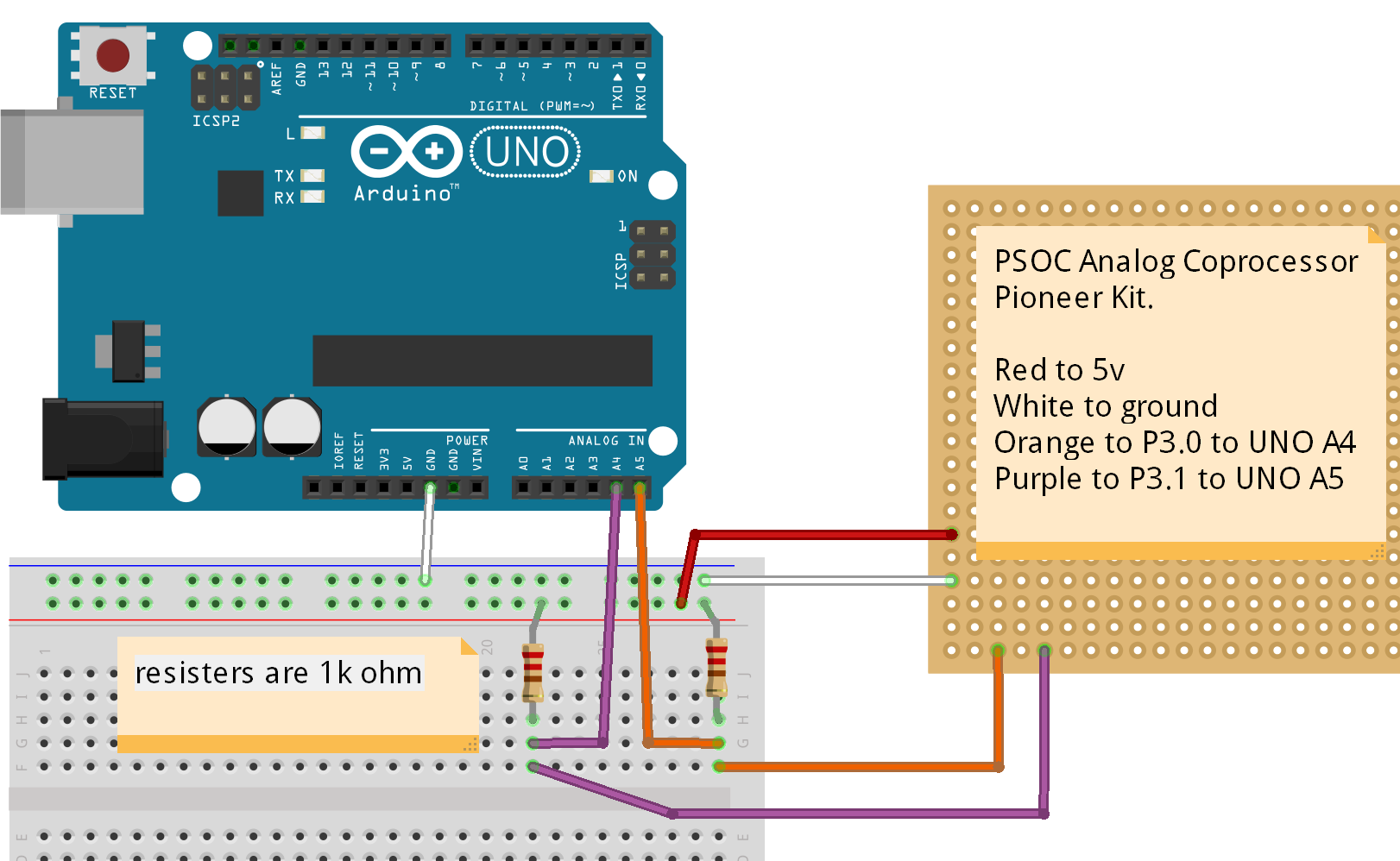
* Related Hardware : CY8CKIT-048 PSoC Analog Coprocessor Pioneer Kit
*******************************************************************************
* Copyright (2016), Cypress Semiconductor Corporation.
*******************************************************************************
* This software, including source code, documentation and related materials
* ("Software") is owned by Cypress Semiconductor Corporation (Cypress) and is
* protected by and subject to worldwide patent protection (United States and
* foreign), United States copyright laws and international treaty provisions.
* Cypress hereby grants to licensee a personal, non-exclusive, non-transferable
* license to copy, use, modify, create derivative works of, and compile the
* Cypress source code and derivative works for the sole purpose of creating
* custom software in support of licensee product, such licensee product to be
* used only in conjunction with Cypress's integrated circuit as specified in the
* applicable agreement. Any reproduction, modification, translation, compilation,
* or representation of this Software except as specified above is prohibited
* without the express written permission of Cypress.
*
* Disclaimer: THIS SOFTWARE IS PROVIDED AS-IS, WITH NO WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, NONINFRINGEMENT, IMPLIED
* WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE.
* Cypress reserves the right to make changes to the Software without notice.
* Cypress does not assume any liability arising out of the application or use
* of Software or any product or circuit described in the Software. Cypress does
* not authorize its products for use as critical components in any products
* where a malfunction or failure may reasonably be expected to result in
* significant injury or death ("ACTIVE Risk Product"). By including Cypress's
* product in a ACTIVE Risk Product, the manufacturer of such system or application
* assumes all risk of such use and in doing so indemnifies Cypress against all
* liability. Use of this Software may be limited by and subject to the applicable
* Cypress software license agreement.
*******************************************************************************/
/*******************************************************************************
* Theory of Operation: This code example demonstrates how to implement an analog
* front end (AFE) for an ambient light sensor (ALS) using the PSoC Analog Coprocessor.
* The measured ALS current and the calculated light illuminance are sent over I2C
* using the Cypress Bridge Control Panel program. Also, the light illuminance value
* is used to control the brightness of an LED, such that the brightness corresponds
* to the ambient light illuminance.
*******************************************************************************/
/* Header File Includes */
#include <project.h>
/* IIR Filter coefficient */
/* Cut off frequency = fs/(2 * pi * iir_filter_constant). In this project fs ~= 1 ksps.
This results in a cut-off frequency of 15.91 Hz. We are using IIR filter as FIR requires
more order of filter to get the same cut-off frequency*/
#define FILTER_COEFFICIENT_ALS (10)
/* Constants for photodiode current calculation */
/* Scale Factor = (VREF / (2048 * 220K)) * 10^9 nA = 2.6633
As the TIA produces a negative voltage, the scale factor is made
negative */
#define ALS_CURRENT_SCALE_FACTOR_NUMERATOR (-26633)
#define ALS_CURRENT_SCALE_FACTOR_DENOMINATOR (10000)
/* Constants for ambient light calculation */
/* Scale Factor = 10000Lx / 3000nA = 3.333 */
#define ALS_LIGHT_SCALE_FACTOR_NUMERATOR (3333)
#define ALS_LIGHT_SCALE_FACTOR_DENOMINATOR (1000)
#define PWM_DUTY_SCALE (1u)
#define PWM_DUTY_OFFSET (0)
#define ADC_CHANNEL_ALS (0u)
#define READ_WRITE_BOUNDARY (0u)
/* The I2C Slave address by default in a PSoC device is 8 */
#define I2C_SLAVE_ADDRESS (8u)
/* Set the write buffer length to be 16 bits or 2 bytes */
#define WR_BUFFER_SIZE (2u)
/* Structure that holds the ALS current and the ambient light illuminance value */
/* Use __attribute__((packed)) for GCC and MDK compilers to pack structures */
/* For other compilers use the corresponding directive. */
/* For example, for IAR use the following directive */
/* typedef __packed struct {..}struct_name; */
typedef struct __attribute__((packed))
{
int16 alsCurrent; /* Ambient light sensor current output */
uint16 illuminance; /* Ambient light illuminance */
}als_sensor_data;
/* Function Prototypes */
void InitResources(void);
/* Declare the i2cBuffer to exchange sensor data between Bridge Control
Panel (BCP) and PSoC Analog Coprocessor */
als_sensor_data i2cBuffer = {0, 0};
/*******************************************************************************
* Function Name: main
********************************************************************************
*
* Summary:
* This function initializes all the resources, and in an infinite loop, performs
* tasks to measure/calculate the ALS sensor output and to send the data over I2C
as slave to the Bridge Control Panel and as master to an Arduino Uno.
*
* Parameters:
* None
*
* Return:
* int
*
* Side Effects:
* None
*******************************************************************************/
int main()
{
/* This variable is used to store the ADC result */
int16 adcResult;
/* These are used for firmware low pass filter input and output */
int16 filterInput;
int32 filterOutput = 0;
/* Variable to store sensor current and light illuminance */
int16 alsCurrent;
uint16 illuminance;
/* Variable to store the PWM Duty Cycle */
unsigned int pwmDutyCycle;
/* Variable to store the status returned by CyEnterCriticalSection()*/
uint8 interruptState = 0;
/* Enable global interrupts */
CyGlobalIntEnable;
/* Initialize hardware resources */
InitResources();
/*******************************************
********************************************
*BELL addition begins
********************************************
********************************************/
uint8 light;
/*******************************************
********************************************
*BELL addition ENDS
********************************************
********************************************/
/* Infinite Loop */
for(;;)
{
/* Check if the ADC data is ready */
if(ADC_IsEndConversion(ADC_RETURN_STATUS))
{
/* Get the ADC result */
adcResult = ADC_GetResult16(ADC_CHANNEL_ALS);
/* Low pass filter the ADC result */
filterInput = adcResult;
filterOutput = (filterInput + (FILTER_COEFFICIENT_ALS - 1)*filterOutput)/FILTER_COEFFICIENT_ALS;
/* Calculate the photodiode current */
alsCurrent = (filterOutput * ALS_CURRENT_SCALE_FACTOR_NUMERATOR)/ALS_CURRENT_SCALE_FACTOR_DENOMINATOR;
/* If the calculated current is negative, limit it to zero */
if(alsCurrent < 0)
{
alsCurrent = 0;
}
/* Calculate the light illuminance */
illuminance = (alsCurrent * ALS_LIGHT_SCALE_FACTOR_NUMERATOR)/ALS_LIGHT_SCALE_FACTOR_DENOMINATOR;
/* Get the PWM duty cycle from the light illuminance value */
pwmDutyCycle = ((unsigned int)illuminance*PWM_DUTY_SCALE)+PWM_DUTY_OFFSET;
/* Limit the duty cycle */
if(pwmDutyCycle>PWM_PWM_PERIOD_VALUE)
pwmDutyCycle = PWM_PWM_PERIOD_VALUE;
/* Update the PWM duty cycle */
PWM_WriteCompare(PWM_PWM_PERIOD_VALUE-pwmDutyCycle);
/* Enter critical section to check if I2C bus is busy or not */
interruptState = CyEnterCriticalSection();
if(!(EZI2C_EzI2CGetActivity() & EZI2C_EZI2C_STATUS_BUSY))
{
/* Update I2C Buffer */
i2cBuffer.alsCurrent = alsCurrent;
i2cBuffer.illuminance = illuminance;
}
CyExitCriticalSection(interruptState);
}
/*******************************************
********************************************
*BELL addition begins
********************************************
********************************************/
/* Set up I2C as master */
/* Attempt to initiate communication with the slave until the function
* completes without error.
*/
do
{
/* automatically writes a buffer of data to a slave
* device from start to stop.
*/
light = I2C_1_I2CMasterWriteBuf(I2C_1_I2C_SLAVE_ADDRESS, (uint8 *)&i2cBuffer, WR_BUFFER_SIZE, I2C_1_I2C_MODE_COMPLETE_XFER);
}
while (light != I2C_1_I2C_MSTR_NO_ERROR);
/* Wait for the data transfer to complete */
while(I2C_1_I2CMasterStatus() & I2C_1_I2C_MSTAT_XFER_INP);
/*******************************************
********************************************
*BELL addition ENDS
********************************************
********************************************/
}
}
/*******************************************************************************
* Function Name: void InitResources(void)
*****************
* Summary:
* This function initializes all the hardware resources
*
* Parameters:
* None
*
* Return:
* None
*
* Side Effects:
* None
*******************************************************************************/
void InitResources(void)
{
/* Start the Scanning SAR ADC Component and start conversion */
ADC_Start();
ADC_StartConvert();
/* Start the trans-impedance amplifier (TIA) */
Opamp_TIA_Start();
/* Start Reference buffer */
RefBuffer_Start();
/* Start Programmable Voltage Reference */
PVref_Start();
/* Enable Programmable Voltage Reference */
PVref_Enable();
/* Start PWM */
PWM_Start();
/* Start EZI2C Slave Component and initialize buffer */
EZI2C_Start();
EZI2C_EzI2CSetBuffer1(sizeof(i2cBuffer), READ_WRITE_BOUNDARY, (uint8*)&i2cBuffer);
/*******************************************
********************************************
*BELL addition begins
********************************************
********************************************/
/* Start I2C_1 Master Component */
I2C_1_Start();
}
/* [] END OF FILE */




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









{kind=link}
Comments
Please log in or sign up to comment.