


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
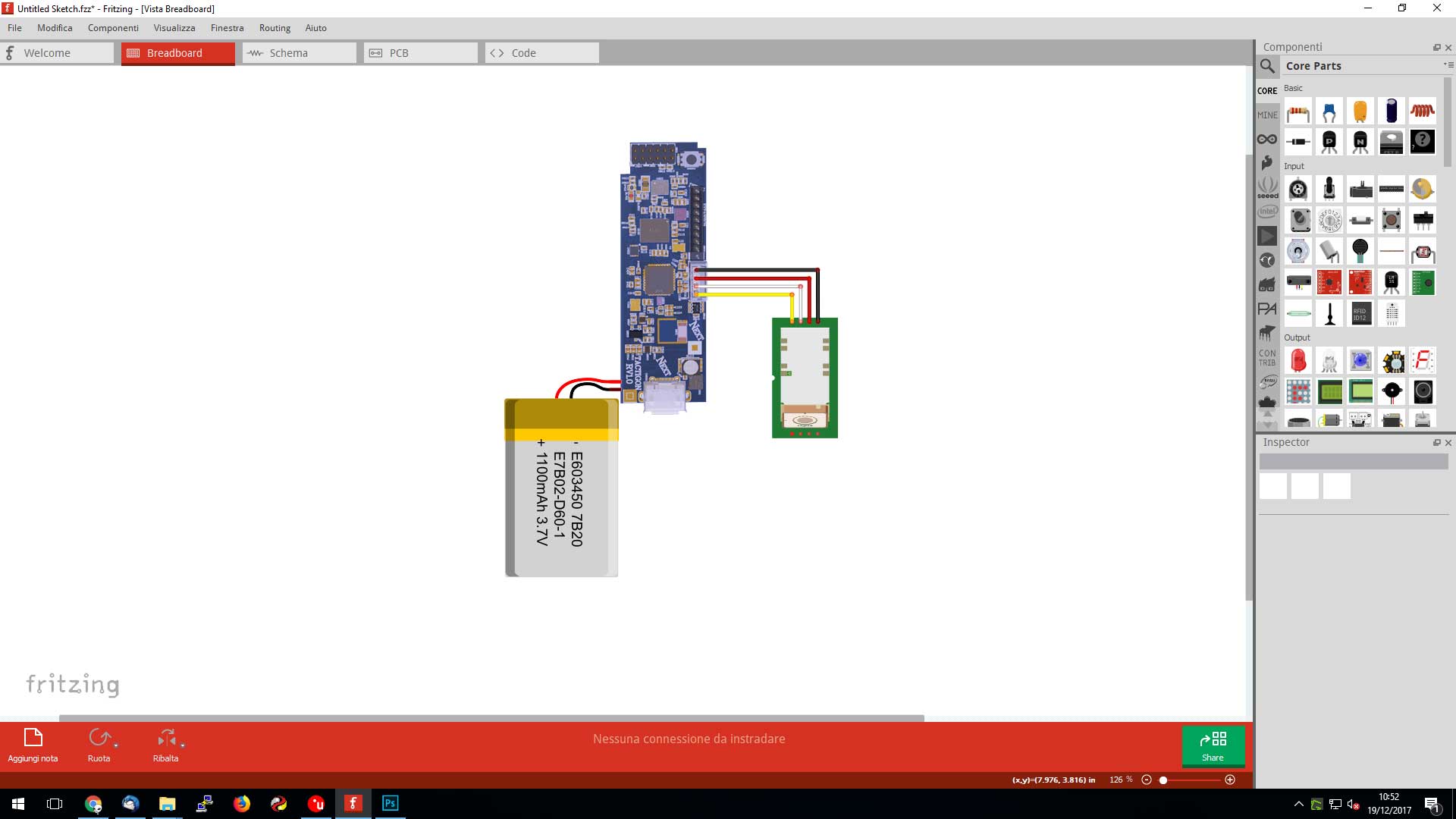
We connected a GROVE GPS to The Tactigon, to pair position data to Euler's Angles. Libraries offers both Bluetooth Low Energy and Serial communication, so we connected the GPS using UART and we used Bluetooth Low Energy to transmit data to our Android Smartphone, programmed using Processing Android Mode.
KML - Keyhole Markup LanguageTo format gathered data we used KML files, since we needed a way to pair Global Position data with parameters read by sensors on board (in this case Euler's angles, Pitch, Roll and Yaw). KML format is use4d by Google Earth, Google Maps and many other software to share paths, positions, and is broadly used by programmers. KML file generated by our application is structured as follow:
<Placemark>
<name>172043.0</name>
<ExtendedData>
<Dataname="Roll">
<value>-140.57332°</value>
</Data>
<Dataname="Pitch">
<value>18.839018°</value>
</Data>
<Dataname="Yaw">
<value>-91.80548°</value>
</Data>
</ExtendedData>
<Point>
<coordinates>9.385868,45.57182,0.0</coordinates>
</Point>
</Placemark>
Placemark tag identify our point over the map. This point has a name (<name> tag, we used the UTC timestamp), a point made of geographic coordinates (latitude and longitude, <Point> tag), in DD format, and related data, <ExtendedData>, where in our application are Roll, Pitch and Yaw values recorded in the current position. This format describes now a series of points with all the informations we wanted to monitor, readable with free tools.
In the following images, we can see the path and a point detail, showing Roll, Pitch and Yaw.
The Tactigon is connected to GPS Receiver by a serial port, UART, and thanks to The Tactigon's Library is possible to pair a callback triggered by each byte received.
We created a buffer, analyzed when an endline value is retrieved. The sketch parses the lines and grabs latitude and longitude.
Bluetooth Low Energy is used to transmit data (GPS and Angles) to a BLE Central Device, in our case an Android Smartphone.
Android - LoggingProcessing code receives data from The Tactigon and log it in KML format file in the internal storage.
We used BLEPDROID library to use Bluetooth Low Energy with Processing Android Mode.
/**
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47
Where:
GGA Global Positioning System Fix Data
123519 Fix taken at 12:35:19 UTC
4807.038,N Latitude 48 deg 07.038' N
01131.000,E Longitude 11 deg 31.000' E
1 Fix quality: 0 = invalid
1 = GPS fix (SPS)
2 = DGPS fix
3 = PPS fix
4 = Real Time Kinematic
5 = Float RTK
6 = estimated (dead reckoning) (2.3 feature)
7 = Manual input mode
8 = Simulation mode
08 Number of satellites being tracked
0.9 Horizontal dilution of position
545.4,M Altitude, Meters, above mean sea level
46.9,M Height of geoid (mean sea level) above WGS84
ellipsoid
(empty field) time in seconds since last DGPS update
(empty field) DGPS station ID number
47 the checksum data, always begins with
*/
#include <tactigon_led.h>
#include <tactigon_BLE.h>
#include <tactigon_IMU.h>
#include <tactigon_UserSerial.h>
#include <tactigon_IO.h>
#include <stdio.h>
char bufferGPS[92]; // buffer array for data receive over serial port
int count = 0; // counter for buffer array
uint8_t g_bbb[15];
boolean bufferFull = false;
//RGB LEDs
T_Led rLed, bLed, gLed;
T_ACC accMeter;
T_AccData accData;
T_QUAT qMeter;
T_QData qData;
//BLE Manager, BLE Characteristic and its UUID
T_BLE bleManager;
UUID uuid;
T_BLE_Characteristic bleChar;
//UART
T_UserSerial tSerial;
//GPIO
T_GPP gpp4;
//Used for LEDs cycle
int ticksLed, stp;
void setup() {
//Serial.begin(115200);
rLed.init(T_Led::RED);
gLed.init(T_Led::GREEN);
bLed.init(T_Led::BLUE);
rLed.off();
gLed.off();
bLed.off();
//init role
bleManager.InitRole(TACTIGON_BLE_PERIPHERAL);
// bleManager.setName("TTGPS");
//uuidIMU.set("6039d4f2-080c-11e8-ba89-0ed5f89f718b");
uuid.set("6039d2a4-080c-11e8-ba89-0ed5f89f718b");
bleChar = bleManager.addNewChar(uuid, 15);
// bleIMUChar = bleManager.addNewChar(uuidIMU, 14);
//init gpps
gpp4.init(T_GPP::GPP4, T_GPP::GPP_OUT);
//init user serial
gpp4.write(1);
tSerial.init(T_UserSerial::B_9600);
tSerial.setRxByteCB(cbUartRxByte);
tSerial.setRxLineCB(cbUartRxLine);
}
/*----------------------------------------------------------------------*/
void cbUartRxByte(uint8_t bb) {
bufferGPS[count++] = bb; // writing data into array
if ((char)bb == '\n' /*|| count == 63*/ ) {
bufferFull = true;
}
}
/*----------------------------------------------------------------------*/
void cbUartRxLine(const uint8_t *pLine, uint8_t len) {
}
void IMUUpdate() {
//unsigned char buffData[14];
//get acc data
accData = accMeter.getAxis();
//get quaternions data
qData = qMeter.getQs();
//prepare buffer
memcpy(&g_bbb[0], &qData.q0, 2);
memcpy(&g_bbb[2], &qData.q1, 2);
memcpy(&g_bbb[4], &qData.q2, 2);
memcpy(&g_bbb[6], &qData.q3, 2);
memcpy(&g_bbb[8], &accData.x, 2);
memcpy(&g_bbb[10], &accData.y, 2);
memcpy(&g_bbb[12], &accData.z, 2);
g_bbb[14] = 0x55;
//update ble characteristic
bleChar.update(g_bbb);
}
void AnglesUpdate() {
qData = qMeter.getQs();
memcpy(&g_bbb[0], &qData.roll, sizeof(float));
memcpy(&g_bbb[4], &qData.pitch, sizeof(float));
memcpy(&g_bbb[8], &qData.yaw, sizeof(float));
g_bbb[14] = 0x55;
//update ble characteristic
bleChar.update(g_bbb);
}
void parseBuffer() {
if (StrContains(bufferGPS, "GPGGA")) {
bufferGPS[63] = '\0';
/**
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47
$GPGGA,091332.000,4531.9253,N,00929.9413,E,1,9,0.78,127.0,M,48.
*/
int ret;
float timestampF, latF, lonF = 0;
char timestamp[11], lat[10], latS[2], lon[11], lonS[2], crap[64];
//Serial.write(bufferGPS, 63);
if ( sscanf(&bufferGPS[7], " %[^','], %[^','], %[^','], %[^','], %[^','], %s", timestamp, lat, latS, lon, lonS, crap) > 5) {
// if ( sscanf(&bufferGPS[7], "%f,%f,%c,%f,%c,%s", ×tampF, &latF, latS, &lonF, lonS, crap) > 5 ) {
Serial.write(timestamp, 10);
Serial.println();
Serial.write(lat, 9);
Serial.write(latS, 1);
Serial.println();
Serial.write(lon, 10);
Serial.write(lonS, 1);
Serial.println();
timestampF = atof (timestamp);
latF = atof (lat);
lonF = atof (lon);
rLed.on();
gLed.on();
bLed.on();
memcpy(&g_bbb[0], &latF, sizeof(float));
memcpy(&g_bbb[4], &latS[0], 1);
memcpy(&g_bbb[5], &lonF, sizeof(float));
memcpy(&g_bbb[9], &lonS[0], 1);
memcpy(&g_bbb[10], ×tampF, sizeof(float));
g_bbb[14] = 0xaa;
bleChar.update(g_bbb);
}
}
clearBufferArray();
count = 0;
}
void loop() {
int ret;
float timestampF, latF, lonF = 0;
//char timestamp[11], lat[10], latS[2], lon[11], lonS[2], crap[64];
if (bufferFull) {
parseBuffer();
bufferFull = false;
}
//Cycle rgb leds
if (GetCurrentMilli() >= (ticksLed + (1000 / 1))) {
AnglesUpdate();
ticksLed = GetCurrentMilli();
if (stp == 0) {
rLed.on();
gLed.off();
bLed.off();
}
else if (stp == 1) {
rLed.off();
gLed.off();
bLed.on();
}
else if (stp == 2) {
rLed.off();
gLed.on();
bLed.off();
}
stp = (stp + 1) % 3;
//sprintf(bufferGPS, "$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47");
//ret = sscanf(&bufferGPS[7], "%f,%f,%c,%f,%c,%s", ×tampF, &latF, latS, &lonF, lonS,crap);
// sprintf(bufferGPS, "123.45");
// ret = sscanf(bufferGPS, "%lf", ×tampF);
//
// Serial.println(ret);
// Serial.write(bufferGPS, 20);
}
}
void clearBufferArray() { // function to clear buffer array
for (int i = 0; i < count; i++) {
bufferGPS[i] = NULL;
} // clear all index of array with command NULL
}
char StrContains(const char *str, const char *sfind) {
char found = 0;
char index = 0;
char len;
len = strlen(str);
if (strlen(sfind) > len) {
return 0;
}
while (index < len) {
if (str[index] == sfind[found]) {
found++;
if (strlen(sfind) == found) {
return 1;
}
}
else {
found = 0;
}
index++;
}
return 0;
}
/************************************/
/* The Tactigon GPS and IMU Logging */
/* V0.7 - Michele Valentini */
/************************************/
import blepdroid.*;
import blepdroid.BlepdroidDevice;
import android.os.Bundle;
import android.content.Context;
import java.util.UUID;
import java.nio.ByteBuffer;
import java.nio.ByteOrder;
import android.location.Location;
import java.text.ParseException;
import java.text.SimpleDateFormat;
import java.util.Date;
import java.util.Locale;
Buffer buffer;
int bufferSize = 100;
BlepdroidDevice device1;
Blepdroid blepdroid;
int textSizeVal = 60;
boolean allSetUp = false;
boolean targetCharacteristicFound = false;
float lat, lon, timestamp;
char latS, lonS;
float roll, pitch, yaw;
public static String deviceName = "TTGPS";
private SimpleDateFormat sdf;
private String filename;
private String path = "/sdcard/TheTactigon/";
public static String TACTIGON_QUAT_CHAR_STRING = "6039d2a4-080c-11e8-ba89-0ed5f89f718b";
public static UUID TACTIGON_QUAT_UUID = UUID.fromString(TACTIGON_QUAT_CHAR_STRING);
private GPSData lastGPS;
void setup() {
lat = 0;
lon= 0;
timestamp = 0;
latS = ' ';
lonS = ' ';
roll = 0;
pitch = 0;
yaw = 0;
sdf = new SimpleDateFormat();
sdf.applyPattern("yyyyMMdd_HHmmss");
filename = "TheTactigon_"+getTime()+"_.kml";
buffer = new Buffer(bufferSize, filename, path);
fullScreen();
smooth();
blepdroid = new Blepdroid(this);
}
void draw() {
if (allSetUp) {
background(10);
textSize(textSizeVal/3);
textAlign(CENTER, CENTER);
text("(DMm)", width/2, height/3-(3*textSizeVal));
textSize(textSizeVal);
textAlign(CENTER, CENTER);
text(getLatString(), width/2, height/3-(2*textSizeVal));
textAlign(CENTER, CENTER);
text(getLonString(), width/2, height/3);
textAlign(CENTER, CENTER);
text(getTimestampString(), width/2, height/3+(2*textSizeVal));
textAlign(CENTER, CENTER);
text(getRollString(), width/2, (2*height/3)-(2*textSizeVal));
textAlign(CENTER, CENTER);
text(getPitchString(), width/2, (2*height/3));
textAlign(CENTER, CENTER);
text(getYawString(), width/2, (2*height/3)+(2*textSizeVal));
textSize(textSizeVal/2);
textAlign(CENTER, CENTER);
text(path+filename, width/2, (2*height/3)+(3*textSizeVal));
} else {
background(100);
textSize(textSizeVal*2);
textAlign(CENTER, CENTER);
text("TAP TO", width/2, height/2-(textSizeVal));
text("CONNECT", width/2, height/2+(textSizeVal));
}
}
void mousePressed() {
if (targetCharacteristicFound == false) {
println(" scan !");
blepdroid.scanDevices();
} else {
println(" Connected " );
}
}
void stop() {
buffer.close();
super.stop();
}
void exit() {
println("exiting");
super.exit();
}
private String getLatString() {
return "LAT: ".concat(Utils.NMEAtoDMm(lat)).concat(Character.toString(latS));
// return Float.toString(lat).concat(Character.toString(latS));
}
private String getLonString() {
return "LON: ".concat(Utils.NMEAtoDMm(lon)).concat(Character.toString(lonS));
// return Float.toString(lon).concat(Character.toString(lonS));
}
private String getTimestampString() {
return ""+timestamp+" GMT";
}
private String getRollString() {
return "Roll: ".concat(String.format("%.2f", roll)).concat("");
}
private String getPitchString() {
return "Pitch: ".concat(String.format("%.2f", pitch)).concat("");
}
private String getYawString() {
return "Yaw: ".concat(String.format("%.2f", yaw)).concat("");
}
// get the date and time as a String:
private String getTime() {
return sdf.format(new Date());
}
void onDeviceDiscovered(BlepdroidDevice device) {
println("discovered device " + device.name + " address: " + device.address + " rssi: " + device.rssi );
if (device.name != null && device.name.equals(deviceName)) {
println("Device Found");
if (blepdroid.connectDevice(device)) {
println(" connected!");
device1 = device;
} else {
println(" couldn't connect target device ");
}
}
}
void onServicesDiscovered(BlepdroidDevice device, int status) {
HashMap<String, ArrayList<String>> servicesAndCharas = blepdroid.findAllServicesCharacteristics(device);
for ( String service : servicesAndCharas.keySet()) {
print( service + " has " );
// this will list the UUIDs of each service, in the future we're going to make
// this tell you more about each characteristic, e.g. whether it's readable or writable
//println( servicesAndCharas.get(service));
for (String charact : servicesAndCharas.get(service)) {
print( " charact: " + charact);
if (charact.equals(TACTIGON_QUAT_CHAR_STRING)) {
targetCharacteristicFound = true;
print( " target QUAT characteristic found! ");
println("Registered UUID: " + TACTIGON_QUAT_UUID);
blepdroid.setCharacteristicToListen(device, TACTIGON_QUAT_UUID);
}
}
}
// we want to set this for whatever device we just connected to
//blepdroid.setCharacteristicToListen(device, RFDUINO_UUID_RECEIVE);
allSetUp = true;
}
void onBluetoothRSSI(BlepdroidDevice device, int rssi) {
println(" onBluetoothRSSI " + device.address + " " + Integer.toString(rssi));
}
void onBluetoothConnection( BlepdroidDevice device, int state) {
blepdroid.discoverServices(device);
}
void onCharacteristicChanged(BlepdroidDevice device, String characteristic, byte[] data) {
println("XXX onCharacteristicChanged " + characteristic);
/** Aggiornare dati nuovi **/
byte[] IDMexA = new byte[1];
System.arraycopy(data, 14, IDMexA, 0, 1);
if (IDMexA[0] == (byte) 0xAA) {
println(" GPS");
byte[] latA = new byte[4];
byte[] latSA = new byte[1];
byte[] lonA = new byte[4];
byte[] lonSA = new byte[1];
byte[] timestampA = new byte[4];
System.arraycopy(data, 0, latA, 0, 4);
System.arraycopy(data, 4, latSA, 0, 1);
System.arraycopy(data, 5, lonA, 0, 4);
System.arraycopy(data, 9, lonSA, 0, 1);
System.arraycopy(data, 10, timestampA, 0, 4);
lat = ByteBuffer.wrap(latA).order(ByteOrder.LITTLE_ENDIAN).getFloat();
lon = ByteBuffer.wrap(lonA).order(ByteOrder.LITTLE_ENDIAN).getFloat();
timestamp = ByteBuffer.wrap(timestampA).order(ByteOrder.LITTLE_ENDIAN).getFloat();
latS = (char)latSA[0];
lonS = (char)lonSA[0];
println(" " + lat + " " + latS + " " + lon + " " + lonS + " " + timestamp);
lastGPS = new GPSData(lat, latS, lon, lonS, timestamp);
buffer.addData(lastGPS);
} else if (IDMexA[0] == 0x55) {
println(" IMU");
byte[] rollA = new byte[4];
byte[] pitchA = new byte[4];
byte[] yawA = new byte[4];
System.arraycopy(data, 0, rollA, 0, 4);
System.arraycopy(data, 4, pitchA, 0, 4);
System.arraycopy(data, 8, yawA, 0, 4);
roll = ByteBuffer.wrap(rollA).order(ByteOrder.LITTLE_ENDIAN).getFloat();
pitch = ByteBuffer.wrap(pitchA).order(ByteOrder.LITTLE_ENDIAN).getFloat();
yaw = ByteBuffer.wrap(yawA).order(ByteOrder.LITTLE_ENDIAN).getFloat();
roll = (roll * 180)/(float)Math.PI;
pitch = (pitch * 180)/(float)Math.PI;
yaw = (yaw * 180)/(float)Math.PI;
println(" Roll: "+roll+" Pitch: "+ pitch + " Yaw: "+yaw);
if (lastGPS == null) {
println("lastGPS == null");
} else {
lastGPS.addIMUData(new IMUData(roll, pitch, yaw));
println("lastGPS.addIMUData()");
}
} else
{
println(" UNKNOWN: " + IDMexA[0]);
}
}
void onDescriptorWrite(BlepdroidDevice device, String characteristic, String data) {
println(" onDescriptorWrite " + characteristic + " " + data);
}
void onDescriptorRead(BlepdroidDevice device, String characteristic, String data) {
println(" onDescriptorRead " + characteristic + " " + data);
}
void onCharacteristicRead(BlepdroidDevice device, String characteristic, byte[] data) {
println(" onCharacteristicRead " + characteristic + " " + data);
}
void onCharacteristicWrite(BlepdroidDevice device, String characteristic, byte[] data) {
println(" onCharacteristicWrite " + characteristic + " " + data);
}
import java.util.*;
import java.io.FileOutputStream;
import android.content.Context;
import android.os.Environment;
import java.io.*;
public class Buffer {
private int size;
private String path;
private String filename;
private PrintWriter out;
private List<GPSData> DataList = new ArrayList<GPSData>();
public Buffer(int size) {
this.size = size;
this.filename="TheTactigonGPS.txt";
this.path = "//sdcard//TheTactigon//";
this.open();
}
public Buffer (int size, String filename) {
this.size = size;
this.filename = filename;
println(filename);
this.path="//sdcard//TheTactigon//";
this.open();
}
public Buffer(int size, String filename, String path) {
this.size = size;
this.path = path;
this.filename=filename;
this.open();
}
public void open(){
if(OpenFile()){
//Write the tags to open
out.println("<kml xmlns=\"http://www.opengis.net/kml/2.2\">\n<Document>\n\t<name>"+this.filename+"</name>\n");
out.flush();
out.close();
}
}
public void close() {
//Write the tags to close
if (OpenFile()){
out.println("</Document>\n</kml>");
out.flush();
out.close();
}
}
public void addData(GPSData data) {
if (DataList.size()<size) {
DataList.add(data);
} else {
DataList.add(data);
//Write to path
if (OpenFile()) {
for (GPSData d : DataList) {
out.println(d.toKML());
}
out.flush();
out.close();
DataList.clear();
}
}
}
private void createFile(File f) {
File parentDir = f.getParentFile();
try {
parentDir.mkdirs();
f.createNewFile();
}
catch(Exception e) {
e.printStackTrace();
}
}
private boolean OpenFile() {
boolean fileOpened = false;
try {
File f = new File(dataPath(path+filename));
File dir = new File(dataPath(path));
if (!dir.exists()) {
dir.mkdir();
}
if (!f.exists()) {
createFile(f);
}
try {
out = new PrintWriter(new BufferedWriter(new FileWriter(f, true)));
// out.println("Open!!###\n");
fileOpened = true;
//out.close();
}
catch (IOException e) {
e.printStackTrace();
}
}
catch(Exception exc) {
print("Eccezione apertura file! " + exc.getMessage());
}
return fileOpened;
}
}
public class GPSData implements Data{
private float altitude;
private float lat;
private float lon;
private float timestamp;
private char latS;
private char lonS;
private List<Data> IMU;
public GPSData(float lat, char latS, float lon, char lonS, float timestamp) {
IMU = new ArrayList<Data>();
this.latS = latS;
this.lat = lat;
this.lonS = lonS;
this.lon = lon;
this.timestamp = timestamp;
this.altitude = 0;
}
public GPSData(float lat, char latS, float lon, char lonS, float timestamp, float altitude) {
IMU = new ArrayList<Data>();
this.latS = latS;
this.lat = lat;
this.lonS = lonS;
this.lon = lon;
this.timestamp = timestamp;
this.altitude=altitude;
}
public void addIMUData(IMUData imu) {
IMU.add(imu);
}
public float getDDLat() {
float ret;
ret = Utils.NMEAtoDD(lat);
if (latS == 'S') {
ret = -(ret);
}
return ret;
}
public float getDDLon() {
float ret;
ret = Utils.NMEAtoDD(lon);
if (lonS == 'W') {
ret = -(ret);
}
return ret;
}
public float getAltitude() {
return this.altitude;
}
public String toXML() {
String ret = "";
ret+="<GPS>\n";
ret+="\t<lat>"+lat+"</lat>\n";
// ret+="\t<latS>"+latS+"</latS>\n";
ret+="\t<lon>"+lon+"</lon>\n";
// ret+="\t<lonS>"+lonS+"</lonS>\n";
ret+="\t<timestamp>"+timestamp+"</timestamp>\n";
ret+="</GPS>\n";
return ret;
}
public String toKML() {
String ret = "";
ret+="\t<Placemark>\n";
ret+="\t\t<name>"+timestamp+"</name>\n";
if (!IMU.isEmpty()) {
ret+="\t\t<ExtendedData>\n";
for (Data i : IMU) {
ret+=i.toKML();
}
ret+="\t\t</ExtendedData>\n";
}
ret+="\t\t<Point>\n";
ret+="\t\t\t<coordinates>"+this.getDDLon()+","+this.getDDLat()+","+this.getAltitude()+"</coordinates>\n";
ret+="\t\t</Point>\n";
ret+="\t</Placemark>\n";
return ret;
}
}
public class IMUData implements Data{
private float roll;
private float pitch;
private float yaw;
public IMUData(float roll, float pitch, float yaw) {
this.roll = roll;
this.pitch = pitch;
this.yaw = yaw;
}
public float getRoll() {
return this.roll;
}
public float getPitch() {
return this.pitch;
}
public float getYaw() {
return this.yaw;
}
public String toXML() {
String ret = "";
ret+="<IMU>\n";
ret+="\t<roll>"+roll+"</roll>\n";
ret+="\t<pitch>"+pitch+"</pitch>\n";
ret+="\t<yaw>"+yaw+"</yaw>\n";
ret+="</IMU>\n";
return ret;
}
public String toKML() {
String ret = "";
ret+="\t\t\t<Data name=\"Roll\">\n";
ret+="\t\t\t\t<value>"+this.roll+"</value>\n";
ret+="\t\t\t</Data>\n";
ret+="\t\t\t<Data name=\"Pitch\">\n";
ret+="\t\t\t\t<value>"+this.pitch+"</value>\n";
ret+="\t\t\t</Data>\n";
ret+="\t\t\t<Data name=\"Yaw\">\n";
ret+="\t\t\t\t<value>"+this.yaw+"</value>\n";
ret+="\t\t\t</Data>\n";
return ret;
}
}
public static class Utils {
public static String NMEAtoDMm(float data) {
String ret = "";
int deg = (int)data/100;
ret+=deg;
ret+=" ";
ret+=String.format("%.8f", data-(deg*100));
ret+="' ";
return ret;
}
public static float NMEAtoDD(float data){
String ret = "";
float deg = (int)data/100;
//println(deg);
deg+=((data-(deg*100))/60);
ret+=String.format("%.8f",deg);
ret.replace(',','.');
// println(data +" " +deg);
return deg;
}
}
<?xml version="1.0" encoding="UTF-8"?>
<manifest xmlns:android="http://schemas.android.com/apk/res/android" android:versionCode="1" android:versionName="1.0" package="">
<uses-sdk android:minSdkVersion="15" android:targetSdkVersion="24"/>
<application android:debuggable="true" android:icon="@drawable/icon" android:label="">
<activity android:name=".MainActivity" android:theme="@android:style/Theme.NoTitleBar">
<intent-filter>
<action android:name="android.intent.action.MAIN"/>
<category android:name="android.intent.category.LAUNCHER"/>
</intent-filter>
</activity>
<service android:name="blepdroid.BluetoothLeService"/>
</application>
<uses-permission android:name="android.permission.ACCESS_COARSE_LOCATION"/>
<uses-permission android:name="android.permission.ACCESS_FINE_LOCATION"/>
<uses-permission android:name="android.permission.BLUETOOTH"/>
<uses-permission android:name="android.permission.BLUETOOTH_ADMIN"/>
<uses-permission android:name="android.permission.READ_EXTERNAL_STORAGE"/>
<uses-permission android:name="android.permission.WAKE_LOCK"/>
<uses-permission android:name="android.permission.WRITE_EXTERNAL_STORAGE"/>
</manifest>



{kind=link}
Comments
Please log in or sign up to comment.