

Hardware components | ||||||
 |
| × | 4 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
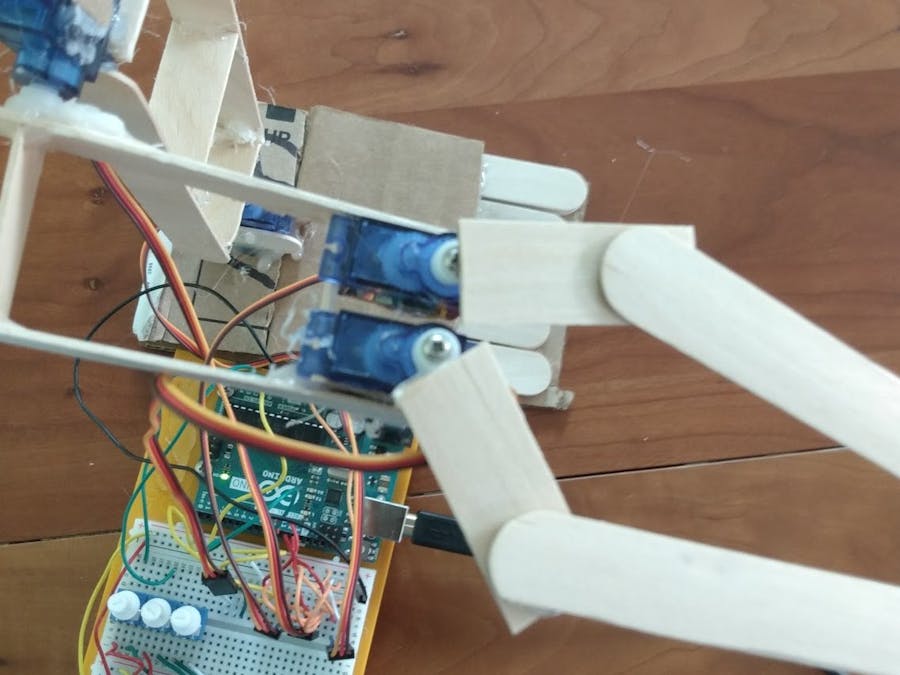
This robotic arm is a easy one, and it can be made out of household materials. I did it with popsicle sticks, but it can be done with cardboard, or even 3d printed parts. This is just a base model, you can always add on to it.
I use potentiometers to control the servos, but that is optional if you want to control it through code.



Comments
Please log in or sign up to comment.