I thought it might be cool to create a wall mounted "Weasley Clock" so I can see where my wife is and she can see where I am.
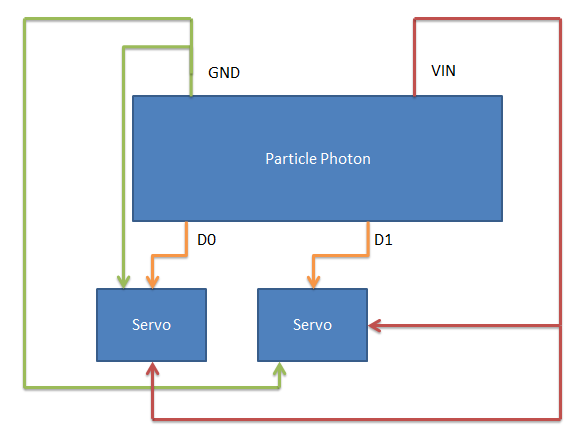
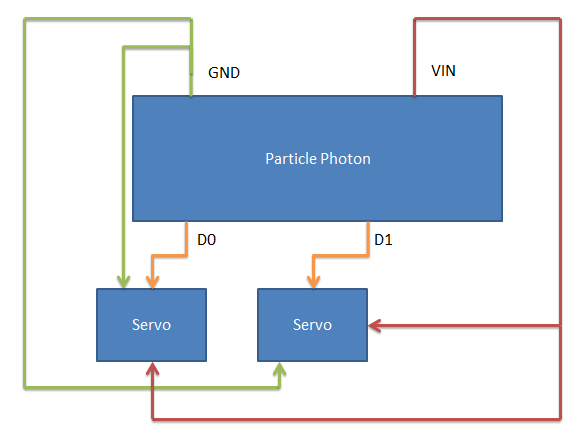
I started with a deep box frame with a 1.5in liner so I could hide the servos behind it. I wired up the servos and used a box cutter to cut holes for the servos to fit through. (Note: I inserted the servos from different directions (from back to front and from front to back) so that the 'hands' didn't hit eachother).
Then I bundled up the particle on a breadboard and the cables and screwed them inside the pattress box on the back. Pretty simple, quite effective I think.
The servos I bought came with little arms so I screwed the wooden coffee stirrers to those and glued some black card over the top with pictures of me and my wife.
I hope you enjoy!
Video: (sorry about the vertical video :( )
To get the full effect, go and buy a maroon jumper.











{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.