



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
Conducting thorough damage assessments of structures such as houses, bridges, and buildings is a critical task to ensure safety and structural integrity. However, traditional manual inspection methods are often expensive, time-consuming, and involve inherent risks to personnel. The challenge lies in finding an efficient and accurate approach to inspecting the entirety of a structure's surface for damage.
Problem DescriptionThe current methods of inspecting structural damage face significant limitations in terms of cost, time, and safety of workers. Manual inspections require physical access to various parts of a structure, often necessitating the use of cranes, scaffolding, or even rappelling. These methods are not only costly but also expose inspectors to hazardous conditions. Moreover, manually evaluating all collected data to identify areas of damage, such as cracks, ASR-related issues, and concrete degradation, is a painstaking process prone to human error.
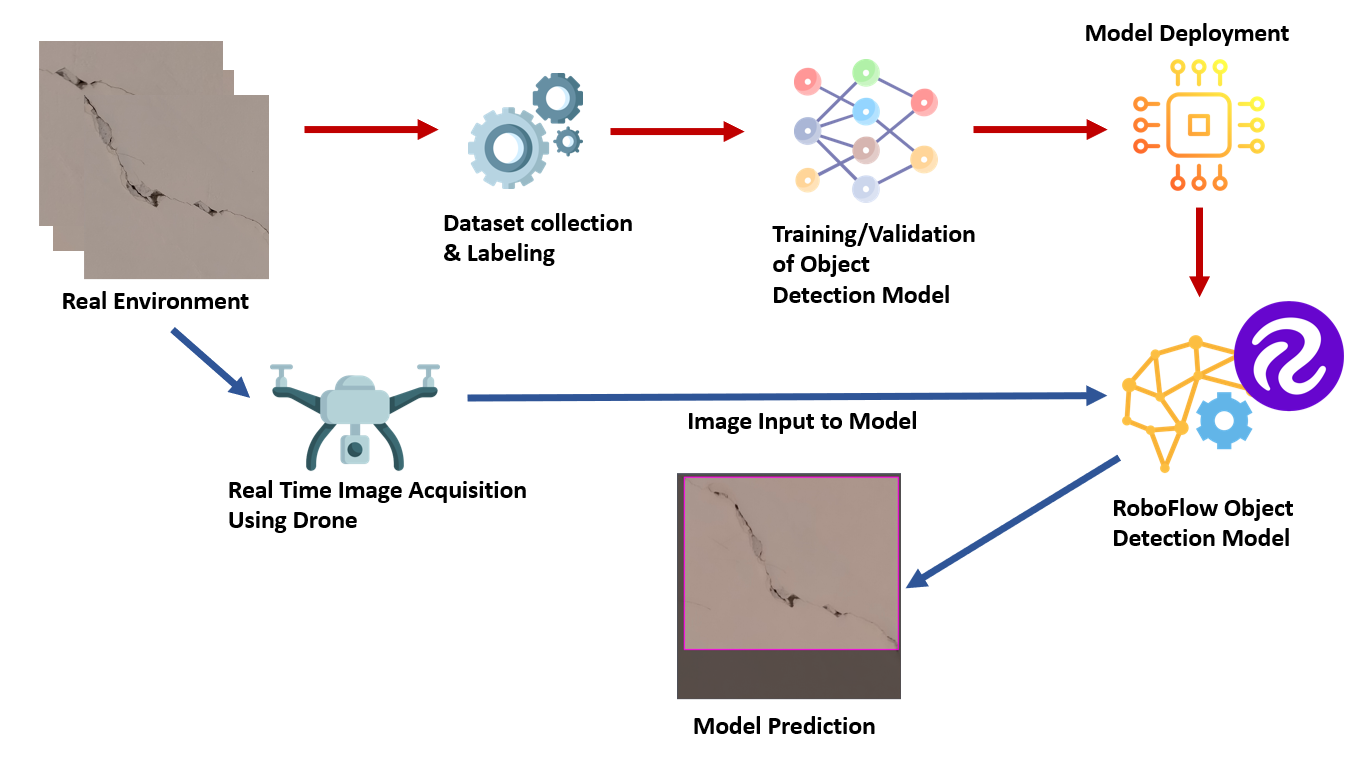
Proposed SolutionThe proposed solution aims to address these challenges by developing an integrated system that combines the capabilities of drones and computer vision technology. By capturing high-resolution imagery of structures and applying advanced computer vision algorithms, the system automate the process of detecting and categorizing structural damage. This automation expedite the inspection process, significantly reduce costs, enhance safety, and improve the accuracy of damage assessment.
The project focuses on building a computer vision model capable of identifying various types of structural damage from imagery captured by drones. The model is trained to detect patterns and anomalies associated with cracks, ASR, concrete degradation, and other forms of damage. A real-time Python application is developed to apply the trained model to live camera streams from the drone, providing instantaneous feedback on detected damage.
Expected Outcomes- Creation of an efficient and automated system for inspecting structural damage.
- Reduction in inspection costs and time through automation and technology.
- Enhanced safety by eliminating the need for risky manual inspections.
- Increased accuracy in detecting and categorizing different types of structural damage.
The successful implementation of this project will lead to a transformative solution that revolutionizes the field of structural damage inspection. By addressing the limitations of traditional methods, this project aims to improve safety, efficiency, and accuracy, ultimately contributing to the preservation of infrastructure and the protection of human lives.
Full report of this projecct can be accessed using following link
Computer Vision Assisted Structural Damage Inspection Using Drones

{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.