The idea for the Smart Crop Rotation System came to me after spending years working on my family's farm. I noticed that traditional crop rotation methods were not always efficient and often relied on guesswork rather than data and analysis. I wanted to find a way to optimize the rotation of crops on our farm, reduce our environmental impact, and increase our crop yields.
Not only this but according to the United Nations food production must increase by 70% by 2050 for which the crop yields should be strong and the wastage should be very less. This creates a challenge for the farmers to come up with a better idea rather than using the same old traditional conventional methods for practicing agriculture.
I started researching different technologies and solutions and eventually came across the concept of a Crop Rotation System. I had known about the traditional crop rotation methods which are inefficient and the majority of times lead to lower crop yields and also have a great risk of pests and diseases. After much rigorous research I got to know about Smart Crop Rotation System.
I was fascinated by the idea of using sensors, drones, rovers, and machine-learning algorithms to analyze data and make recommendations about crop rotation.
After doing more research and talking to other farmers, I realized that there was a real need for this kind of system in the agricultural industry. Farmers were looking for ways to increase efficiency, reduce waste, and improve their environmental impact, and a Smart Crop Rotation System seemed like a promising solution.
The Smart Crop Rotation System technique promises to show an increase in crop yields by an average of 15% while reducing water usage by up to 20%. In addition, this system will reduce the need for pesticides and fertilizers by up to 30%, which results in a more sustainable and environment-friendly farming practice.
So, I decided to take on the challenge of developing a Smart Crop Rotation System for my family's farm. I worked with my friends who have good knowledge of embedded systems and data analysis to design and implement the system.
Coincidentally the HoverGames challenge 3 got announced which was about food and agriculture, for which I was initially inspired to develop the Smart Crop Rotation System by my experiences working on my family's farm. However, the idea truly took shape when I learned about a sustainability contest that was being held in the community.
The contest challenged participants to develop innovative solutions to pressing sustainability issues, and I saw it as an opportunity to showcase the potential of a Smart Crop Rotation System in addressing the challenges facing farmers.
I knew that a Smart Crop Rotation System could help farmers improve their crop yields while also reducing their environmental impact. By using data and analysis to optimize crop rotation, we could reduce the need for pesticides and fertilizers, conserve water, and replenish soil naturally.
So, I and my friend started working on it and the main important part was how should we do it….
So, there were Two-Things through which we can work on it:
Drone: Drones can be used as a valuable tool in a Smart Crop Rotation System. They can provide valuable data on crop health and soil conditions and can help farmers identify areas of the field that need attention. But there are some limitations to it such as
- Cost: drones can be expensive to purchase and maintain this may make them cost-prohibitive for some farmers, especially those operating on a small scale.
- Operations: Operating a drone effectively requires technical expertise, which some farmers may not possess. This could require additional training or the hiring of outside experts to manage the drones.
- Weather: Drones are sensitive to weather conditions, such as wind and rain, which can impact their ability to operate effectively. This means that they may not be a reliable tool for farmers in all climates and regions.
Rovers: Rovers can be a valuable tool in a Smart Crop Rotation System for several reasons. Here are some ways in which rovers could be useful:
- Soil Analysis: Rovers can be equipped with sensors that can analyze the soil conditions and provide valuable data on soil health. This data can help farmers determine which crops to plant in which fields, and how best to prepare the soil for planting.
- Plant Health Monitoring: Rovers can be used to monitor the health of plants and crops. By collecting data on factors such as plant growth rates and color, farmers can identify potential problems early on and take action to address them.
- Precision Agriculture: Rovers can be used to deploy precision agriculture techniques, such as targeted fertilization and pesticide application. By using rovers to apply these inputs only where they are needed, farmers can reduce waste and minimize the environmental impact of their operations.
- Harvesting: Rovers can be used to assist with harvesting, especially in situations where manual labor is difficult or expensive. For example, rovers could be equipped with robotic arms that can pick fruits or vegetables and place them in baskets.
- Navigation: Rovers can be used to navigate difficult terrain or areas that are inaccessible to humans, such as steep slopes or muddy fields. This can help farmers access and manage their crops more effectively.
So, after going through all available options, we thought of going with the rover to build the Smart Crop Rotation System.
So now we submitted our idea to the HoverGames challenge 3 for the rover and we did apply for the hardware.
After waiting for some days, we were eagerly ready to see the grant status for the Hardware. Surprisingly!!!!!!!! we got it.
Now knowing that we are getting a NavQPlus flight computer, we were eagerly waiting for it until customs had stopped the product.
Although having only a flight computer doesn’t solve our problem. So, the next step was to build a rover for which we have to face an important hurdle which is to select good components and develop a good development pipeline.
The hardware stack which we decided is as follows:
- NavQPlus -Flight Computer
- MATEK SYSTEMS- CAN GNSS M9N-F4-5883(GPS module)
- Lumenier LUX H7 HD Ultimate Flight Controller
- 10Amp 5V-30V DC Motor Driver (2 Channels)
- Black 6WD Search Rescue Platform Smart Car Chassis Damping Off-Road Climbing WIFI Car
- L298n dual h-bridge motor driver
- Orange 3300mAh 3S 35C/80C (11.1V) Lithium Polymer Battery Pack
- Google Coral Cammera
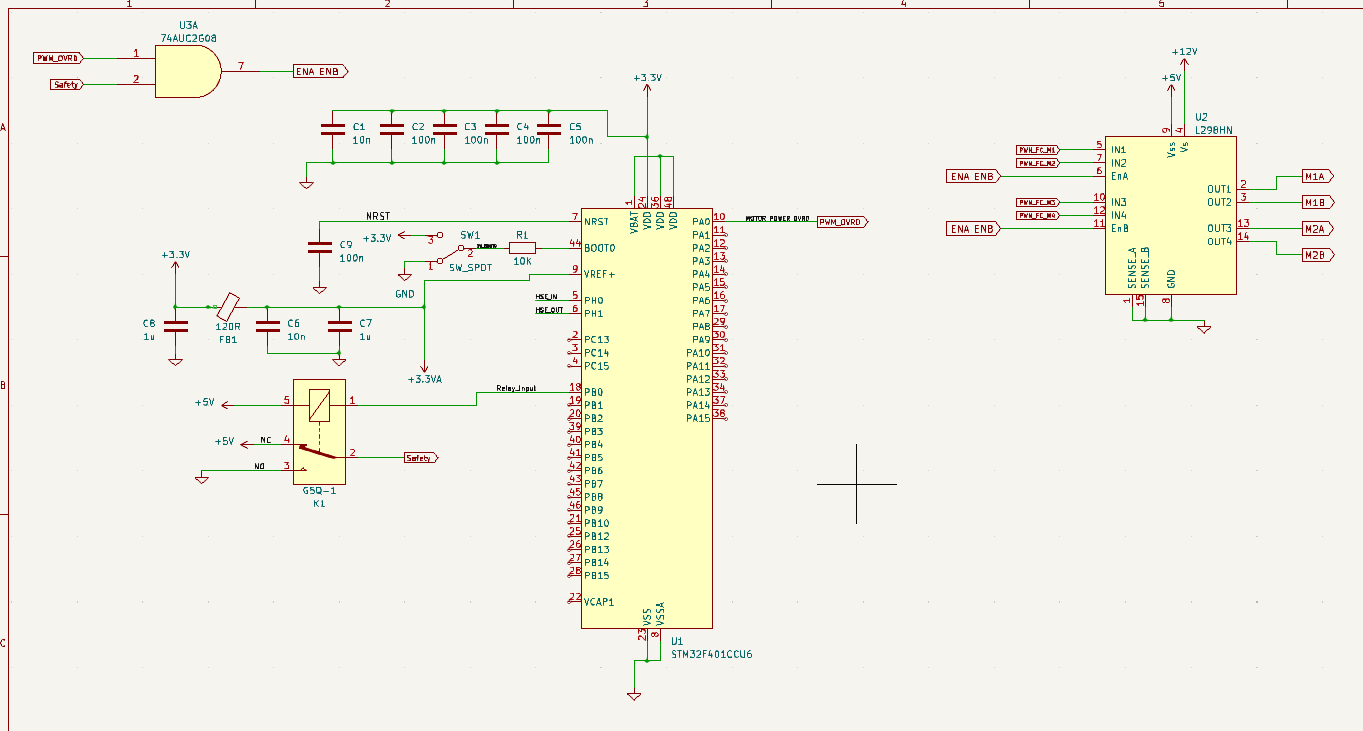
- STM32F401CCU6
- Bosch BME688
- NavQPlus Flight Computer:The NavQPlus flight computer will be used as the main flight controller for your rover. It will be responsible for controlling the movement of the rover and integrating the sensor data from other components.
- Matek Systems GPS Module:The GPS module will be used to provide accurate positioning data for your rover. It will communicate with the NavQPlus flight computer over the CAN bus to provide real-time location information.
- Lumenier LUX H7 HD Flight Controller:The Lumenier LUX H7 HD flight controller is a high-performance controller that can be used to control the gimbal on your rover. It will enable you to capture high-quality HD video footage from the Google Coral camera.
- Motor Drivers:The 10Amp 5V-30V DC Motor Driver and the L298n dual h-bridge motor driver will be used to control the motors on your rover. They will enable you to control the speed and direction of the rover's movement.
- Chassis:The Black 6WD Search Rescue Platform Smart Car Chassis Damping Off-Road Climbing WIFI Car is a rugged and durable chassis that is ideal for use in agricultural environments. It will provide a stable and secure platform for your rover's components.
- Battery:The Orange 3300mAh 3S 35C/80C (11.1V) Lithium Polymer Battery Pack will be used to power your rover. It provides a high-capacity, lightweight power source that is ideal for extended missions in the field.
- Google Coral Camera: The Google Coral Camera is a high-quality camera that will be used to capture images and video footage of your crops. It will be mounted on the gimbal controlled by the Lumenier LUX H7 HD flight controller.
- STM32F401CCU6:The STM32F401CCU6 microcontroller will be used to control the auxiliary functions of your rover, such as the collection and transmission of sensor data.
- STM32F401CCU6:The STM32F401CCU6 microcontroller will be used to control the auxiliary functions of your rover, such as the collection and transmission of sensor data.
- The Bosch BME688 is a high-performance gas sensor that can detect multiple gases simultaneously. It can measure VOC (volatile organic compound) gases, temperature, humidity, and barometric pressure.
The software stack which will be used is as follows:
- Ubuntu
- Visual Studio Code
- ROS
- Mission Planner
- STM Cube
- Ubuntu:Ubuntu is an open-source operating system that you can use as the base for your Smart Crop Rotation System. Ubuntu provides a stable and secure platform that is ideal for running ROS, STM Cube, and other software components required for your project.
- Visual Studio Code (VS Code):VS Code is an integrated development environment (IDE) that you can use to write, debug, and deploy your ROS and STM Cube-based code. VS Code provides a range of useful features, such as code completion, debugging, and version control, that will help you to write high-quality code for your Smart Crop Rotation System.
- Robot Operating System (ROS):ROS is a powerful framework that you can use to build complex robotic systems. ROS provides a range of useful features, such as communication tools, libraries, and drivers, that will help you to build a highly capable and versatile Smart Crop Rotation System.
- Mission Planner: Mission Planner is a ground control station (GCS) that you can use to plan, test, and execute missions for your Smart Crop Rotation System. Mission Planner provides a range of useful features, such as real-time telemetry, flight planning, and mission simulation, that will help you to optimize the performance of your Smart Crop Rotation System.
- STM Cube: STM Cube is a software development platform for STM32 microcontrollers. You can use STM Cube to develop and test firmware for your Smart Crop Rotation System. STM Cube provides a range of useful features, such as code generation, peripheral configuration, and debugging tools, that will help you to build a highly capable and versatile Smart Crop Rotation System.
Tasks should be performed in this project:
- Assembling the hardware components including the 6WD Search Rescue Platform Smart Car Chassis, flight computer, GPS module, motor driver, and battery pack.
- Develop and test the software for controlling the motors and collecting data from sensors using ROS and STM cube.
- Integrate the google coral camera to capture images of crops and use machine learning algorithms to analyze the data.
- Create a user-friendly interface using Mission Planner to display the data collected from the sensors and provide control over the rover.
Through this project, we hope to not only improve the efficiency and sustainability of our own farm but also to contribute to the wider agricultural community by sharing our experiences and findings.
This experience taught us the power of innovation and collaboration in addressing sustainability challenges. By working together and leveraging technology, we can create solutions that not only benefit our own communities but also have the potential to make a positive impact on a global scale.








.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}

Comments
Please log in or sign up to comment.