/*************************************************************************
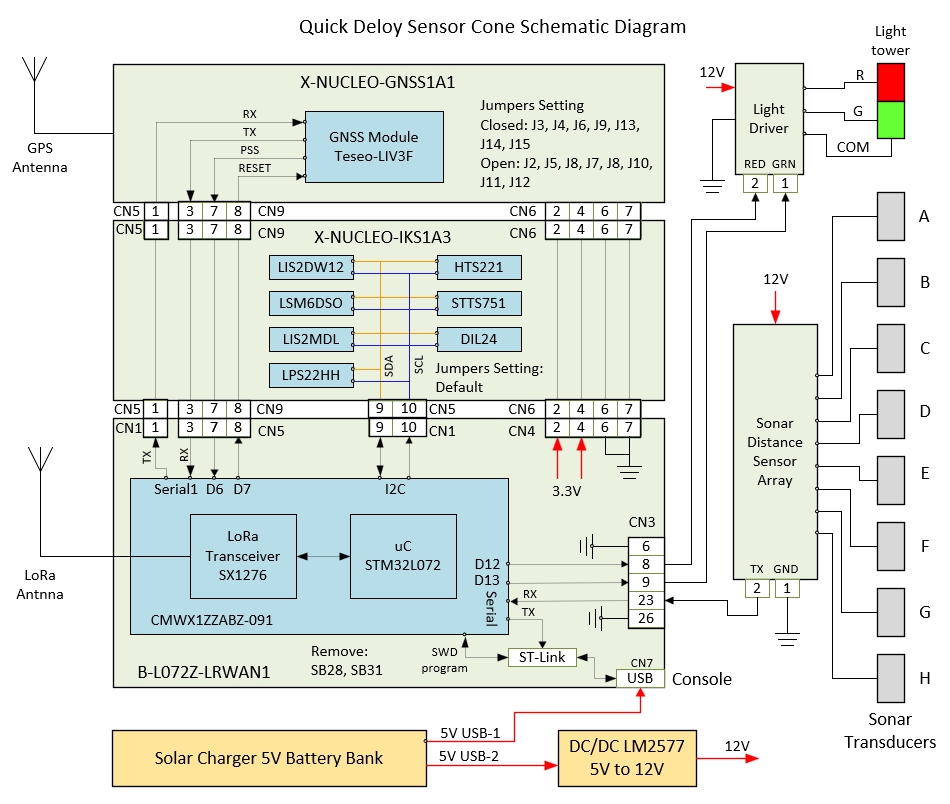
* Project: Quick Deloy Sensor Cone *
* Team member: Hoa Phan, Thien Phung, Nghia Tran *
* Date: 6-Aug-2020 *
**************************************************************************/
/* Setting and dependencies
* Preferences setting:
* File -> Preferences
* Paste the line below in to Additional Boards Manager URLs
* https://grumpyoldpizza.github.io/ArduinoCore-stm32l0/package_stm32l0_boards_index.json
*
* Add Board package:
* Tools -> Board: -> Boards Manager....
* Search Tlera Corp STM32L0 Board
* Install the board
*
* Include *.zip files:
* - HTS221-master
* - LIS2DW12-master
* - LIS2MDL-master
* - LPS22HH-master
* - LSM6DSO-master
* - LSM6DSOX-master
* - STTS751-master
* - CayenneLPP-master
* - MicroNMEA-master
* - X-NUCLEO-GNSS1A1-master
* - X-NUCLEO-IKS01A3-master
*
* Error compilation: ‘NULL’ was not declared in this scope
* ### Temporary Manual Fix from owner
* This issue has been fixed but not released yet, until then you will need to insert
* three lines of code in a library file. Insert the following three lines below at
* line 30 in file `Callback.h` found at the path below.
* ```
* #ifndef NULL
* #define NULL 0
* #endif
* ```
* Into the file found here:
* linux: /home/{user}/.arduino15/packages/TleraCorp/hardware/stm32l0/0.0.10/cores/arduino
* windows: C:\Users\\{User}\AppData\Local\Arduino15\packages\TleraCorp\hardware\stm32l0\0.0.10\cores\arduino
* windows alternative: C:\Users\\{user}\Documents\ArduinoData\packages\TleraCorp\hardware\stm32l0\0.0.10\cores\arduino
*
* Functions list
* void setup()
* void setupLight()
* void setupConsole()
* void setupMEMS()
* void setupGPS()
* void setupLoRa()
* void async_timer_send()
* void readMemsSensors()
* void showMEMSData()
* void readGPS()
* void packData()
* void gpsHardwareReset()
* void readDistance()
* void parseData()
* void showDistance()
* void calculateRollPitchHead()
* void turnRedLightOn()
* void turnRedLightOff()
* void turnGreenLightOn()
* void turnGreenLightOff()
* void loop(void)
******************************************************************************/
#include "LoRaWAN.h"
#include "TimerMillis.h"
#include <CayenneLPP.h>
#include <MicroNMEA.h>
#include <LSM6DSOSensor.h>
#include <LIS2DW12Sensor.h>
#include <LIS2MDLSensor.h>
#include <LPS22HHSensor.h>
#include <STTS751Sensor.h>
#include <HTS221Sensor.h>
const char *devEui = "AC9A4A0B44C49E1A";
const char *appEui = "A8809158BDA17B81";
const char *appKey = "957122A2EDD529701D2B8FF2DFF75AFE";
// Define
#define PI 3.14159
#define GPS_RESET_PIN 7
#define GPS_PPS_PIN 6
#define RED_LIGHT_PIN 12
#define GREEN_LIGHT_PIN 13
const uint32_t TX_INTERVAL = 2000; // 2 seconds
TimerMillis timer_send;
// variables to hold MEMS Sensors from X-NUCLEO-IKS01A3 board
LSM6DSOSensor *AccGyr;
LIS2MDLSensor *Mag;
LPS22HHSensor *PressTemp;
HTS221Sensor *HumTemp;
float humidity = 0;
float temperature = 0;
float pressure = 0;
int32_t accelerometer[3];
int32_t gyroscope[3];
int32_t magnetometer[3];
int acc_x, acc_y, acc_z;
int mag_x, mag_y, mag_z;
float f_roll, f_pitch, f_head;
int angle_x, angle_y, angle_z;
int angle_roll, angle_pitch, angle_head;
// variables to hold GPS data from X-NUCLEO-GNSS1A1
float longitude_mdeg;
float latitude_mdeg;
long alt;
// MicroNMEA library structures
char nmeaBuffer[100];
MicroNMEA nmea(nmeaBuffer, sizeof(nmeaBuffer));
bool ledState = LOW;
volatile bool ppsTriggered = false;
void ppsHandler(void);
void ppsHandler(void) { ppsTriggered = true; }
// variable to hold the parsed data for distance sensor array
const byte numChars = 64;
char receivedChars[numChars];
char tempChars[numChars]; // temporary array fo use when parsing
char messageSensor[numChars] = {0};
int distanceA, distanceB, distanceC, distanceD = 0;
int distanceE, distanceF, distanceG, distanceH = 0;
boolean newData = false;
// Refer to serial devices by use
HardwareSerial &console = Serial;
HardwareSerial &gps = Serial1;
// Cayenne low power package
CayenneLPP lpp(51);
// Flag for uplink schedule
static volatile bool uplink_attempted;
// This flag control how frequent sensor read
int loopCnt = 0;
/******************************************************************************/
/* Setup and initialize */
/******************************************************************************/
void setup() {
setupConsole(); // Share Serial for console and sonar sensor array
setupLight(); // Setup output for red and green light control
setupMEMS(); // Setup I2C for MEMS and envrironmental sensor interface
setupGPS(); // Setup Serial1 and input/output pin for GPS interface
setupLoRa(); // Setup frequency, account, credit, and connection
}
/********************************************************************/
/* Setup ouput pin for Lights */
/********************************************************************/
void setupLight() {
pinMode(RED_LIGHT_PIN, OUTPUT);
digitalWrite(RED_LIGHT_PIN, LOW);
pinMode(GREEN_LIGHT_PIN, OUTPUT);
digitalWrite(GREEN_LIGHT_PIN, LOW);
}
/********************************************************************/
/* setup console and distance sensor array. The console and distance*/
/* sensor arrary share serial */
/* Interface: Serial, baudrate: 115200 */
/********************************************************************/
void setupConsole() {
console.begin(115200);
delay(2000);
Serial.print("\r\n");
Serial.println("****************************************************");
Serial.println("Project: Quick Deploy Sensor Cone");
Serial.println("Date: 6-August-2020");
Serial.println("Team members: Hoa Phan, Thien Phung, and Nghia Tran");
Serial.println("****************************************************");
Serial.println("Console and traffic cone init: Done.");
}
/********************************************************************/
/* setup MEMS and environmental sensor */
/* Interface: I2C */
/********************************************************************/
void setupMEMS() {
Serial.print("Mems and environmental sensor init...: ");
Wire.begin();
// Enable Sensors
AccGyr = new LSM6DSOSensor (&Wire);
AccGyr->Enable_X();
AccGyr->Enable_G();
Mag = new LIS2MDLSensor (&Wire);
Mag->Enable();
PressTemp = new LPS22HHSensor(&Wire);
PressTemp->Enable();
HumTemp = new HTS221Sensor (&Wire);
HumTemp->Enable();
Serial.print("Done.\r\n");
}
/********************************************************************/
/* setup GPS */
/* Pinterface: Serial1, baudrate: 9600 */
/* Pin 7: output for GPS reset */
/* Pin 6: interrutp input for PPS */
/********************************************************************/
void setupGPS() {
delay (3000);
// Serial interface to GPS
Serial.print("GPS init...: ");
gps.begin(9600);
// Start GPS the module
Serial.print("1 ");
pinMode(GPS_RESET_PIN, OUTPUT);
digitalWrite(GPS_RESET_PIN, HIGH);
gpsHardwareReset();
delay(300);
// Change the echoing messages to the ones recognized by the MicroNMEA library
Serial.print("2 ");
MicroNMEA::sendSentence(gps, "$PSTMSETPAR,1201,0x00000042");
MicroNMEA::sendSentence(gps, "$PSTMSAVEPAR");
// Reset the device so that the changes could take plaace
MicroNMEA::sendSentence(gps, "$PSTMSRR");
Serial.print("3 ");
// clear serial buffer
while (gps.available())
gps.read();
Serial.print("4 ");
pinMode(GPS_PPS_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(GPS_PPS_PIN), ppsHandler, RISING);
Serial.print("Done.\r\n");
delay(1000);
}
/********************************************************************/
/* Configuration LoRa frequency and account */
/* Frequency: 915 MHz */
/* SubBand: 2 */
/********************************************************************/
void setupLoRa() {
// US Region
LoRaWAN.begin(US915);
// Helium SubBand
LoRaWAN.setSubBand(2);
// Disable Adaptive Data Rate
LoRaWAN.setADR(false);
// Set Data Rate 1 - Max Payload 53 Bytes
LoRaWAN.setDataRate(1);
// Device IDs and Key
LoRaWAN.joinOTAA(appEui, appKey, devEui);
Serial.println("JOIN( )");
while (!LoRaWAN.joined() && LoRaWAN.busy()) {
Serial.println("JOINING( )");
delay(5000);
}
Serial.println("JOINED( )");
// Start Continuous Uplink Timer
timer_send.start(async_timer_send, 0, TX_INTERVAL);
}
/*********************************************************************************************/
/* Send packet */
/*********************************************************************************************/
void async_timer_send() {
if (LoRaWAN.joined() && !LoRaWAN.busy()) {
//Pack data getting ready to send
packData();
// Send Packet
LoRaWAN.sendPacket(1, lpp.getBuffer(), lpp.getSize());
uplink_attempted = true;
}
}
/********************************************************************/
/* Read MEMS and enviromental sensor from X-NUCLEO-IKS01A3 */
/********************************************************************/
void readMemsSensors() {
// Read humidity and temperature.
// float humidity = 0;
//float temperature = 0;
HumTemp->GetHumidity(&humidity);
HumTemp->GetTemperature(&temperature);
// Read pressure and temperature.
// float pressure = 0;
PressTemp->GetPressure(&pressure);
delay(1);
// Read accelerometer and gyroscope.
// int32_t accelerometer[3];
//int32_t gyroscope[3];
AccGyr->Get_X_Axes(accelerometer);
AccGyr->Get_G_Axes(gyroscope);
// Set max, min limit value for acc_x, acc_y, acc_z
if(accelerometer[0] > 1000) acc_x = 1000;
else if(accelerometer[0] < -1000) acc_x = -1000;
else acc_x = accelerometer[0];
if(accelerometer[1] > 1000) acc_y = 1000;
else if(accelerometer[1] < -1000) acc_y = -1000;
else acc_y = accelerometer[1];
if(accelerometer[2] > 1000) acc_z = 1000;
else if(accelerometer[2] < -1000) acc_z = -1000;
else acc_z = accelerometer[2];
// Read magnetometer
//int32_t magnetometer[3];
Mag->GetAxes(magnetometer);
mag_x = magnetometer[0];
mag_y = magnetometer[1];
mag_z = magnetometer[2];
/*
// Clear Payload
lpp.reset();
// Pack Packload
lpp.addTemperature(1, temperature);
lpp.addRelativeHumidity(2, humidity);
lpp.addBarometricPressure(3, pressure);
lpp.addAccelerometer(4, accelerometer[0], accelerometer[1], accelerometer[2]);
lpp.addGyrometer(5, gyroscope[0], gyroscope[1], gyroscope[2]);
*/
}
/********************************************************************/
/* Read MEMS and enviromental sensor from X-NUCLEO-IKS01A3 */
/********************************************************************/
/*void showMEMSData(){
// Debug Print Data
Serial.print("\r\n");
Serial.print("| Hum[%]: ");
Serial.print(humidity, 2);
Serial.print(" | Temp[C]: ");
Serial.print(temperature, 2);
Serial.print(" | Pres[hPa]: ");
Serial.print(pressure, 2);
Serial.print(" | Acc[mg]: ");
Serial.print(acc_x);//(accelerometer[0]);
Serial.print(" ");
Serial.print(accelerometer[1]);
Serial.print(" ");
Serial.print(accelerometer[2]);
Serial.print(" | Gyr[mdps]: ");
Serial.print(gyroscope[0]);
Serial.print(" ");
Serial.print(gyroscope[1]);
Serial.print(" ");
Serial.print(gyroscope[2]);
Serial.print(" | Mag[mT]: ");
Serial.print(" ");
Serial.print(magnetometer[0]);
Serial.print(" ");
Serial.print(magnetometer[1]);
Serial.print(" ");
Serial.println(magnetometer[2]);
Serial.print("\r\n");
}
*/
/********************************************************************/
/* Read MEMS and enviromental sensor from X-NUCLEO-IKS01A3 */
/********************************************************************/
void showMEMSData(){
// Debug Print Data
Serial.print("\r\n");
Serial.print("Hum[%]: ");
Serial.print(humidity, 2);
Serial.print(" Temp[C]: ");
Serial.print(temperature, 2);
Serial.print(" Pres[hPa]: ");
Serial.print(pressure, 2);
Serial.print(" Acc[mg]: ");
Serial.print(acc_x);//(accelerometer[0]);
Serial.print(" ");
Serial.print(accelerometer[1]);
Serial.print(" ");
Serial.print(accelerometer[2]);
Serial.print(" Gyr[mdps]: ");
Serial.print(gyroscope[0]);
Serial.print(" ");
Serial.print(gyroscope[1]);
Serial.print(" ");
Serial.print(gyroscope[2]);
Serial.print(" Mag[uT]: ");
Serial.print(" ");
Serial.print(magnetometer[0]);
Serial.print(" ");
Serial.print(magnetometer[1]);
Serial.print(" ");
Serial.println(magnetometer[2]);
Serial.print("\r\n");
}
/********************************************************************/
/* Read GPS data from X-NUCLEO-GNSS1A1 */
/********************************************************************/
void readGPS() {
// If a message is received
if (ppsTriggered) {
ppsTriggered = false;
// Clear Payload
// lpp.reset();
latitude_mdeg = nmea.getLatitude();
longitude_mdeg = nmea.getLongitude();
nmea.getAltitude(alt);
// lpp.addGPS(6, latitude_mdeg / 1000000, longitude_mdeg / 1000000,
// alt / 1000);
nmea.clear();
}
// While the message isn't complete
while (!ppsTriggered && gps.available()) {
// Fetch the character one by one
char c = gps.read();
//Serial.print(c);
// Pass the character to the library
nmea.process(c);
}
}
/********************************************************/
/* Pack data for Cayenne lLP */
/********************************************************/
void packData(){
// Clear Payload
lpp.reset();
// Pack Packload
lpp.addTemperature(1, temperature);
lpp.addRelativeHumidity(2, humidity);
lpp.addBarometricPressure(3, pressure);
lpp.addAccelerometer(4, accelerometer[0], accelerometer[1], accelerometer[2]);
lpp.addGyrometer(5, gyroscope[0], gyroscope[1], gyroscope[2]);
lpp.addGPS(6, latitude_mdeg / 1000000, longitude_mdeg / 1000000, alt / 1000);
}
/********************************************************/
/* Reset GPS module */
/********************************************************/
void gpsHardwareReset() {
// Empty input buffer
while (gps.available())
gps.read();
// reset the device
digitalWrite(GPS_RESET_PIN, LOW);
delay(50);
digitalWrite(GPS_RESET_PIN, HIGH);
// wait for reset to apply
delay(4000);
}
/****************************************************************************************************/
/* Read Distance sensor array module. */
/* Data sent from distance sensor array is a string via serial 115200bps format as below */
/* New set of distance is update every half of second */
/* <Sonar, distanceA, distanceB, distanceC, distanceD, distanceE, distanceF, distanceG, distanceH> */
/* Example: <Sonar,1234,2345,3245,325,2344,886,12887,1123> */
/* Ref: https://forum.arduino.cc/index.php?topic=396450.0 */
/****************************************************************************************************/
void readDistance(){
static boolean recvInProgress = false;
static byte ndx = 0;
char startMarker = '<';
char endMarker = '>';
char rc;
while (Serial.available() > 0 && newData == false){
rc = Serial.read();
if (recvInProgress == true) {
if (rc != endMarker) {
receivedChars[ndx] = rc;
ndx++;
if (ndx >= numChars) {
ndx = numChars - 1;
}
}
else {
receivedChars[ndx] = '\0'; // terminate the string
recvInProgress = false;
ndx = 0;
newData = true;
}
}
else if (rc == startMarker) {
recvInProgress = true;
}
}
}
/*********************************************************************************************/
/* Parse Distance Sensor Data */
/* There eight distance senor A, B, C, D, E, F, G, and H */
/* Ref: https://forum.arduino.cc/index.php?topic=396450.0 */
/**********************************************************************************************/
void parseData() { //split the data into its parts
char * strtokIndx; // this is used by strtok() as an index
strtokIndx = strtok(tempChars, ","); // get the first part - the string
strcpy(messageSensor, strtokIndx); // copy it to messageFromSensor
strtokIndx = strtok(NULL, ","); // this continues where the previous call left off
distanceA = atoi(strtokIndx); // convert this part to an integer
strtokIndx = strtok(NULL, ","); // this continues where the previous call left off
distanceB = atoi(strtokIndx); // convert this part to an integer
strtokIndx = strtok(NULL, ","); // this continues where the previous call left off
distanceC = atoi(strtokIndx); // convert this part to an integer
strtokIndx = strtok(NULL, ","); // this continues where the previous call left off
distanceD = atoi(strtokIndx); // convert this part to an integer
strtokIndx = strtok(NULL, ","); // this continues where the previous call left off
distanceE = atoi(strtokIndx); // convert this part to an integer
strtokIndx = strtok(NULL, ","); // this continues where the previous call left off
distanceF = atoi(strtokIndx); // convert this part to an integer
strtokIndx = strtok(NULL, ","); // this continues where the previous call left off
distanceG = atoi(strtokIndx); // convert this part to an integer
strtokIndx = strtok(NULL, ","); // this continues where the previous call left off
distanceH = atoi(strtokIndx); // convert this part to an integer
}
/*********************************************************************************************/
/* Show Distance Sensor Data */
/* There eight distance senor A, B, C, D, E, F, G, and H */
/**********************************************************************************************/
void showDistance() {
Serial.print("\r\n");
Serial.print(messageSensor);
Serial.print(" ");
Serial.print("A:");
Serial.print(distanceA);
Serial.print(" B:");
Serial.print(distanceB);
Serial.print(" C:");
Serial.print(distanceC);
Serial.print(" D:");
Serial.print(distanceD);
Serial.print(" E:");
Serial.print(distanceE);
Serial.print(" F:");
Serial.print(distanceF);
Serial.print(" G:");
Serial.print(distanceG);
Serial.print(" H:");
Serial.print(distanceH);
Serial.print("\r\n");
}
/*********************************************************************************************/
/* Calculate Roll, Pitch, Yaw (heading) */
/* Orignal source: ST Software package: x-cube-mems1, file motion_ec_manager.c */
/* This function requires data from 3 axis of accelerometer and 3 axis of magnetometer *
/*********************************************************************************************/
void calculateRollPitchHead() {
float fNormAcc,fSinRoll,fCosRoll,fSinPitch,fCosPitch;
float fTiltedX,fTiltedY;
float fAcc[3];
float f_acc_x, f_acc_y, f_acc_z;
float f_mag_x, f_mag_y, f_mag_z;
int i;
/* Rescale the accelerometer radings (in order to increase accuracy in the following norm computation) */
// Board on horizonal(on test bench) orientation config
// Accelerometer data
/* f_acc_x = (float) acc_x/1000.0;
f_acc_y = (float) acc_y/1000.0;
f_acc_z = (float) acc_z/1000.0;
// Magnetometer data
f_mag_x = (float) mag_x/1000.0;
f_mag_y = (float) mag_y/1000.0;
f_mag_z = (float) mag_z/1000.0;
*/
//Board on vertial (on pole) orienation config
// Accelerometer data
f_acc_x = (float) acc_z/1000.0;
f_acc_y = (float) acc_y/1000.0;
f_acc_z = (float) acc_x/1000.0;
// Magnetometer data
f_mag_x = (float) mag_z/1000.0;
f_mag_y = (float) mag_y/1000.0;
f_mag_z = (float) mag_x/1000.0;
// Test print out
//Serial.println(f_acc_x); Serial.println(f_acc_y); Serial.println(f_acc_z);
//Serial.println(f_mag_x); Serial.println(f_mag_y); Serial.println(f_mag_z);
/* Compute the scaled acceleration vector norm */
fNormAcc = sqrt(pow(f_acc_x,2) + pow(f_acc_y,2) + pow(f_acc_z,2));
/* Compute some useful parameters for the g vector rotation matrix */
fSinRoll = f_acc_y/sqrt(pow(f_acc_y,2) + pow(f_acc_z,2));
fCosRoll = sqrt(1.0 - fSinRoll * fSinRoll);
fSinPitch = - f_acc_x/fNormAcc;
fCosPitch = sqrt(1.0 - fSinPitch * fSinPitch);
/* Apply the rotation matrix to the magnetic field vector to obtain the X and Y components on the earth plane */
fTiltedX = f_mag_x * fCosPitch + f_mag_z * fSinPitch;
fTiltedY = f_mag_x * fSinRoll * fSinPitch + f_mag_y * fCosRoll - f_mag_z * fSinRoll * fCosPitch;
/* return the heading angle expressed in degree */
f_head = -atan2(fTiltedY, fTiltedX);
f_head = f_head * 180.0/PI;
f_head = floor(f_head * 100.0 + 0.5) / 100.0; /* Rounds number to two decimal digits */
f_head = (f_head < 0.0) ? (f_head + 360.0) : f_head; /* Change negative value to be in range <0,360) */
/* return the roll and pitch angles */
f_roll = atan2(fSinRoll,fCosRoll);
f_pitch = atan2(fSinPitch,fCosPitch);
/* Make roll, pitch, head into integer */
angle_roll = (int)(f_roll * 180.0/PI);
angle_pitch = (int) (f_pitch * 180.0/PI);
angle_head = (int) f_head;
}
/*********************************************************************************************/
/* Turn ON/OFF Red/Green Light */
/*********************************************************************************************/
void turnRedLightOn(){
digitalWrite(RED_LIGHT_PIN, HIGH);
}
void turnRedLightOff(){
digitalWrite(RED_LIGHT_PIN, LOW);
}
void turnGreenLightOn(){
digitalWrite(GREEN_LIGHT_PIN, HIGH);
}
void turnGreenLightOff(){
digitalWrite(GREEN_LIGHT_PIN, LOW);
}
/*********************************************************************************************/
/* Main loop */
/*********************************************************************************************/
void loop(void) {
if (uplink_attempted) {
Serial.println("***************************************************************");
/* Serial.print("TRANSMIT( ");
Serial.print("TimeOnAir: ");
Serial.print(LoRaWAN.getTimeOnAir());
Serial.print(", NextTxTime: ");
Serial.print(LoRaWAN.getNextTxTime());
Serial.print(", MaxPayloadSize: ");
Serial.print(LoRaWAN.getMaxPayloadSize());
Serial.print(", DR: ");
Serial.print(LoRaWAN.getDataRate());
Serial.print(", TxPower: ");
Serial.print(LoRaWAN.getTxPower(), 1);
Serial.print("dbm, UpLinkCounter: ");
Serial.print(LoRaWAN.getUpLinkCounter());
Serial.print(", DownLinkCounter: ");
Serial.print(LoRaWAN.getDownLinkCounter());
// Serial.println(" )");
//latitude = nmea.getLatitude();
*/ //longitude = nmea.getLongitude();
Serial.print("Latitude (deg): ");
//Serial.print(latitude / 1000000., 6);
Serial.print(latitude_mdeg / 1000000., 6);
Serial.print(" Longitude (deg): ");
//Serial.print(longitude / 1000000., 6);
Serial.print(longitude_mdeg / 1000000., 6);
Serial.print(" Altitude (m): ");
//if (nmea.getAltitude(alt))
Serial.println(alt / 1000., 3);
//else
// Serial.println("not available");
// Print sensor data
showMEMSData();
// Print roll, pitch, heading
Serial.print("Roll: ");
Serial.print(angle_roll);
Serial.print(" Pitch: ");
Serial.print(angle_pitch);
Serial.print(" Head: ");
Serial.println(angle_head);
// Print distance from 8-sensor array
showDistance();
Serial.print("\r\n");
uplink_attempted = false;
}
// Read MEMS and environmental sensor
readMemsSensors();
// Calculate roll, pitch, and heading
calculateRollPitchHead();
// Read GPS data for lat, long, and altitude
readGPS();
// Read distance from array sensor module
readDistance();
if (newData == true) {
strcpy(tempChars, receivedChars);
// this tempoary copy is nessessary to protec the original data
// because strtok(P used in parseData() replaces the commas with \0
parseData();
newData = false;
}
// The array of distance sensor allow to detect an object(s) in 8 directions in range of 2 meters
// This information can be used to monitor the motion of object and be update on the cloud. The distance
// data combine with heading information calculate above allows to know there is/are object(s) in direction
// relative to earth north pole.
// For now a simple senario of detection object(s)
// If there no object in 1.5m, light turn off red and turn on green
// If there is/are objects in 1.5m in any directionion, turn on red light and turn off green light
if( distanceA < 1500 || distanceB < 1500 || distanceC < 1500 || distanceD < 1500 ||
distanceE < 1500 || distanceF < 1500 || distanceG < 1500 || distanceG < 1500)
{
turnGreenLightOff();
turnRedLightOn();
}
else
{
turnGreenLightOn();
turnRedLightOff();
}
}





{kind=link}

Comments
Please log in or sign up to comment.