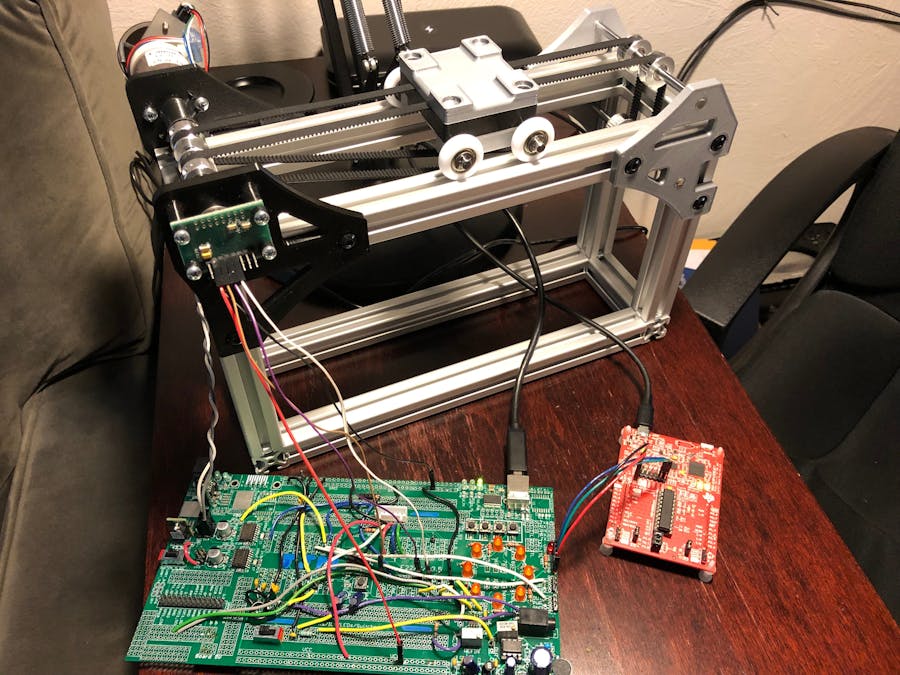
This has been a continuing project to develop a belt-driven inverted pendulum cart. Progress in the project has been submitted as an assignment for the course SE423 - Mechatronics at the University of Illinois at Urbana-Champaign. At this stage in the project, the MSP430F2272 is successfully executing floating point closed-loop control on the belt-driven system at 200 Hz. The MSP430 communicates over SPI to the RLS magnetic encoder chip to read in angular position data of the motor every 5 ms. Additionally, an MPS430's PWM channel is used to command the Allegro MicroSystem's motor driver to throttle the 6VDC 2A power supply on the brushed motor.
Though the MSP430 can track position of the system in floating point arithmetic, the brushed motor is undersized for the friction in the system and will likely need to be scaled to perform highly dynamical motions when balancing the pendulum.
In addition to balancing the pendulum, a milestone of this project is to perform swing-up balance control with the MSP430.







Comments