Another project inspired by being lazy! I made a webserver with an ESP32 which I can access over WiFi using my phone, computer, or even smart TV. The ESP32 works in coordination with a DC motor driver board which adjusts the shades.
To add some complexity, I added a ~5V rechargeable battery and accompanying solar panel. I also added a small microUSB cable that sticks out the side of the blinds. In theory I can use it to charge the battery, or just leave it there to power the device!
This is the conceptualization and build video from my YouTube Channel.
Enter the name of your wifi and open serial monitor to find the ip address of your esp32. I left in PWM components of the code commented out, this can be uncommented and adjusted for speed control. For some reason the code cannot be saved with the full code, paste the ADDITONAL_HTML_CODE in where stated.
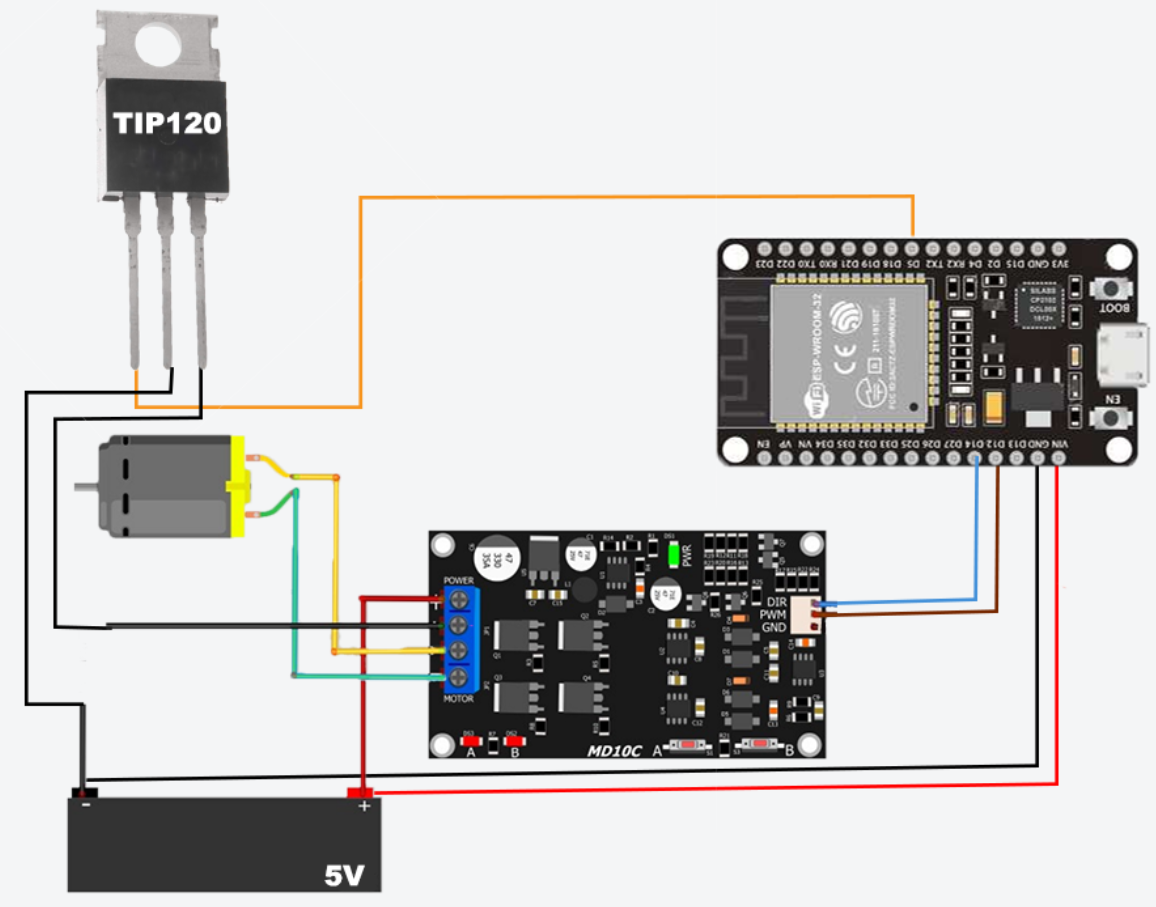
/*Controlling Motors for my window blinds Ty Palowski YouTube channel: https://youtube.com/c/typalowskiPWM components of the code are commented out,this can be uncommented and adjusted for motor speed control.*///define pin name#define dir 14 // Direction Pin#define pwrA 12 // Power Pin for Motor A#define signalPin 5 // Turns On/Off Driver BoardintpwrAState=LOW;intdirStatus=3;// stores direction status 3= stop (do not change)StringbuttonTitle1[]={"CCW","CW"};StringbuttonTitle2[]={"CCW","CW"};StringargId[]={"ccw","cw"};#include<ESPmDNS.h>#include<WebServer.h>#include<WiFi.h>#include<WiFiClient.h>// Setting PWM properties, control the speed of the motor// const int freq = 30000;// const int pwmChannel = 0;// const int resolution = 8;// int dutyCycle = 255;// int operatingDC = 255;// int startupDC = 255;constchar*ssid="Wifi Name Here";constchar*password="Wifi Password Here";WebServerserver(80);voidhandleRoot(){StringHTML=***************ENTERTHE"ADDITONAL_HTML_CODE"HERE******************HTML+="</style>\n\n</head>\n\n<body>\n<h1>Blinds Control </h1>\n";if(dirStatus==2){HTML+="\n\t<h2><span style=\"background-color: #FFFF00\">Motor Running in CW</span></h2>\n";}elseif(dirStatus==1){HTML+="\n\t<h2><span style=\"background-color: #FFFF00\">Motor Running in CCW</span></h2>\n";}else{HTML+="\n\t<h2><span style=\"background-color: #FFFF00\">Motor OFF</span></h2>\n";}if(dirStatus==1){HTML+="\t<div class=\"btn\">\n\t\t<a class=\"angleButton\" style=\"background-color:#f56464\" href=\"/motor?";HTML+=argId[0];HTML+="=off\">";HTML+=buttonTitle1[0];//motor ON title}else{HTML+="\t<div class=\"btn\">\n\t\t<a class=\"angleButton \" style=\"background-color:#90ee90\" href=\"/motor?";HTML+=argId[0];HTML+="=on\">";HTML+=buttonTitle2[0];//motor OFF title }HTML+="</a>\t\n\t</div>\n\n";if(dirStatus==2){HTML+="\t<div class=\"btn\">\n\t\t<a class=\"angleButton\" style=\"background-color:#f56464\" href=\"/motor?";HTML+=argId[1];HTML+="=off\">";HTML+=buttonTitle1[1];//motor ON title}else{HTML+="\t<div class=\"btn\">\n\t\t<a class=\"angleButton \" style=\"background-color:#90ee90\" href=\"/motor?";HTML+=argId[1];HTML+="=on\">";HTML+=buttonTitle2[1];//motor OFF title }HTML+="</a>\t\n\t</div>\n\n";HTML+="\t\n</body>\n</html>\n";server.send(200,"text/html",HTML);}//handleRoot()voidhandleNotFound(){Stringmessage="File Not Found\n\n";message+="URI: ";message+=server.uri();message+="\nMethod: ";message+=(server.method()==HTTP_GET)?"GET":"POST";message+="\nArguments: ";message+=server.args();message+="\n";for(uint8_ti=0;i<server.args();i++){message+=" "+server.argName(i)+": "+server.arg(i)+"\n";}server.send(404,"text/plain",message);}//end of handleNotFound()voidsetup(void){// initialize the pwr and dir pins as outputs:pinMode(pwrA,OUTPUT);pinMode(dir,OUTPUT);pinMode(signalPin,OUTPUT);// configure LED PWM functionalitites// ledcSetup(pwmChannel, freq, resolution);// attach the channel to the GPIO to be controlled// ledcAttachPin(pwrA, pwmChannel);//initialize the serial monitorSerial.begin(115200);Serial.println("Window Blinds Control");WiFi.mode(WIFI_STA);WiFi.begin(ssid,password);Serial.println("");// Wait for connectionwhile(WiFi.status()!=WL_CONNECTED){delay(500);Serial.print(".");}Serial.println("");Serial.print("Connected to ");Serial.println(ssid);Serial.print("IP address: http://");Serial.println(WiFi.localIP());//multicast DNSif(MDNS.begin("WindowBlinds")){Serial.println("MDNS responder started");Serial.println("access via http://WindowBlinds");}server.on("/",handleRoot);server.on("/motor",HTTP_GET,motorControl);server.onNotFound(handleNotFound);server.begin();Serial.println("HTTP server started");}//end of setupvoidloop(void){server.handleClient();if(dirStatus==1){digitalWrite(signalPin,HIGH);delay(15);digitalWrite(dir,LOW);// set DIR pin HIGH or LOW digitalWrite(pwrA,HIGH);//Serial.println("Motor Turning CCW");// ledcWrite(pwmChannel, dutyCycle);// dutyCycle = startupDC;// delay(5);// dutyCycle = operatingDC;}elseif(dirStatus==2){digitalWrite(signalPin,HIGH);delay(15);digitalWrite(dir,HIGH);digitalWrite(pwrA,HIGH);//Serial.println("Motor Turning CW");// dutyCycle = startupDC;// delay(5);// dutyCycle = operatingDC;// ledcWrite(pwmChannel, dutyCycle);}else{digitalWrite(pwrA,LOW);digitalWrite(signalPin,LOW);//Serial.println("Motor Off");// ledcWrite(pwmChannel, dutyCycle);// dutyCycle = 0;}delay(1);}//end of loopvoidmotorControl(){if(server.arg(argId[0])=="on"){dirStatus=1;// CCW }elseif(server.arg(argId[0])=="off"){dirStatus=3;// motor OFF }elseif(server.arg(argId[1])=="on"){dirStatus=2;// CW }elseif(server.arg(argId[1])=="off"){dirStatus=3;// motor OFF}handleRoot();}














{kind=link}
Comments
Please log in or sign up to comment.