


Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Pancake Printer is a fun way to print (and eat) your very own pancakes!
It's basically works like a CNC machine. X and Y axes are controlled with a small computer, and the pancake mixture is poured to the grill, passing throughout a valve mechanism. Then, you cook the pancake within 2 minutes. It's that simple and tasty!
The device is Raspberry Pi 2 controlled. The firmware is a Universal Windows Application running on Windows 10 IoT Core. So, it is easy to integrate gamepad or internet connectivity to the project.
Operation is so simple, just connect a gamepad the the Raspberry Pi 2. The print head will move according to gamepad commands.
Currently, the firmware does not support printing given drawings. It is manually controlled. But, it is much more fun!
The 3D files are located at Thingiverse project page: www.thingiverse.com/thing:989910
You're free to produce your own Pancake Printer, until it is not commercial.
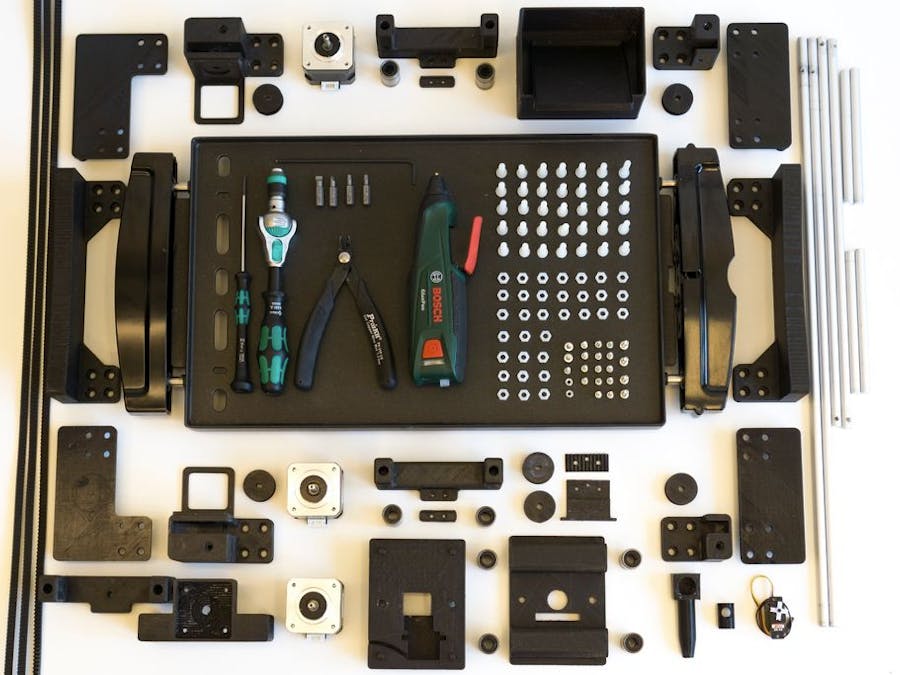
In each step, the required things are listed. Here is the sum of the 3D parts, things and tools needed.
3D Parts
- Base - A x 1
- Base - B x 1
- Base - C x 1
- Base - D x 1
- Grill Holder - A x 1
- Grill Holder - B x 1
- Slot - Bottom - Free - Left x 1
- Slot - Bottom - Free - Right x 1
- Slot - Bottom - Motor - Left x 1
- Slot - Bottom - Motor - Right x 1
- Slot - Bottom - X x 2
- Slot - Top - Motor - Left x 1
- Slot - Top - Free - Right x 1
- Gear x 3
- Gear - Slotted x 3
- Gear - Cap x 6
- Head Slot x 1
- Head Holder x 1
- Head Slot Belt Cap 30 x 1
- Head Extruder x 1
- Head Gate x 1
- Head Valve x 1
- Tank Body x 1
- Tank Cap x 1
- Head Case Pin x 6
Electronics
- Raspberry Pi 2 x 1
- 8GB Micro SD Card x 1
- Microsoft Xbox 360 Wired Gamepad x 1
- 24V 6A Power Supply x 1
- Microstepping Motor Driver x 3
- Moons NEMA 17 Bipolar Stepper Motor x 3
- Micro Servo Motor (e.g. Hitec HS-53) x 1
- Connection cables
Parts
- M5x20mm Plastic Head Bolt x 18
- M3x10mm Bolt x 19
- M4x20mm Bolt x 4
- M5x20mm Slotted Plastic Screw x 16
- M5x30mm Slotted Plastic Screw x 1
- M5 Plastic Nut x 33 M3 Nut x 3
- M3 Washer x 3
- 15x25mm Linear Ball Bearing (8mm inside) x 8
- 8x480mm Rod x 2
- 8x325mm Rod x 2
- 8x115mm Rod x 4
- 963x6mm Belt x 2
- 725x6mm Belt x 1
Tools
- 1,0x5.5 Slotted Screwdriver
- TX10 Hex Key
- TX15 Hex Key
- 3mm Drill
- Hot Glue Gun
- Super Glue
In this step, we'll build the first part of the grill holder and the bottom drive mechanism.
Required 3D Parts:
- Grill Holder - B x 1
- Base - C x 1
- Base - D x 1
- Slot - Bottom - Free - Left x 1
- Slot - Bottom - Free - Right x 1
- Gear x 2
- Gear - Cap x 2
Required Parts:
- M5x20mm Plastic Head Bolt x 18
- M5 Plastic Nut x 16
Required Tools:
- Super Glue
- 1,0x5.5 Slotted Screwdriver
Instructions:
Connect base c and d parts with left and right slot parts. Then, attach them to the both sides of grill holder.
Apply super glue to the gear and its cap, and compress it to make a gear. We'll insert them later.
Step 2: Bottom Part-B & X-Axis MotorsThen, we'll construct the second part of the bottom drive mechanism.
Required 3D Parts:
- Grill Holder - A x 1
- Base - A x 1
- Base - B x 1
- Slot - Bottom - Motor - Left x 1
- Slot - Bottom - Motor - Right x 1
- Gear - Slotted x 2
- Gear - Cap x 2
Required Parts:
- M5x20mm Slotted Plastic Screw x 16
- M5 Plastic Nut x 16
- M3 x 10mm Bolt x 8
- NEMA 17 Moons Stepper Motor x 2
Required Parts:
- 1,0x5.5 Slotted Screwdriver
- TX10 Hex Key
Instructions:
Apply super glue to the slotted gear and its cap. Comptess them.
Sand stepper motor shafts to make them comfortable with the slotted gears.
Insert gears into the slot parts, then attach stepper motors. Use magnetizer / demagnetizer tool to magnetize your hex key. Then, insert screws holding stepper motors, from the holes on the slot parts. Connect grill holder, base a / b parts and slot parts together.
Step 3: X-AxisNow, it's time to build the X-Axis.
Required 3D Parts:
- Slot - Bottom - X x 2
Required Parts:
- 15x25mm Linear Ball Bearing (8mm inside) x 4
- 8x480mm Rod x 2
- M3x10mm Bolt x 4
Required Tools:
- 3mm Drill
Instructions:
First, insert the vertical ball bearings into the both sides of the slot parts. Then, cut the rods according to your grill's size. For mine, 48cm is OK. Then, if you prefer, mark the rods' drill positions, and then drill them. This is not very required since the belts will put all systems in one piece.
At the end, connect all parts together.
Step 4: X-Axis BeltsLet's connect the belts to the conveyors.
Required Parts:
- 963x6mm Belt x 2
Required Tools:
- 1,0x5.5 Slotted Screwdriver
- TX10 Hex Key
Instructions:
Cut the belts according to your grill's size. For my setup, 96.3cm is OK. You need to drill second or third gear of the belts. Then, insert the belts to the slots, and screw them. At the end, you'll have a working X-axis.
Step 5: Print HeadIt's the magic of the Pancake Printer! The print head! It's as simple as connecting the pancake tank with a valve.
Required 3D Parts:
- Head Slot x 1
- Head Holder x 1
- Head Slot Belt Cap 30 x 1
- Head Extruder x 1
- Head Gate x 1
- Head Valve x 1
- Tank Body x 1
- Tank Cap x 1
- Head Case Pin x 6
Required Parts:
- Micro Stepper Motor (e.g. Hitec HS-53) x 1
- 15x25mm Linear Ball Bearing (8mm inside) x 4
Required Tools:
- Hot Glue Gun
- Screwdriver
Instructions:
First, insert 4 vertical ball bearings to the head slot. Then, apply a small amount of hot glue to valve, and combine the servo motor. Insert valve mechanism to the extruder, and push them to the head gate part, as demonstrated in the photo. Insert head case pins to head gate. Finally, combine all the parts together. Then, we'll have the pancake head.
Step 6: Y-AxisY-Axis gives second movement capability to the print head.
Required 3D Parts:
- Slot - Top - Motor - Left x 1
- Slot - Top - Free - Right x 1
- Gear - Slotted x 1
- Gear x 1
- Gear - Cap x 2
Required Parts:
- M3x10mm Bolt x 7
- M3 Nut x 3
- M3 Washer x 3
- M4x20mm Bolt x 4
- NEMA 17 Moons Stepper Motor x 1
- 8x325mm Rod x 2
- M5x30mm Slotted Plastic Screw x 1
- M5 Plastic Nut x 1
- 725x6mm Belt x 1
Required Tools:
- 3mm Drill
- TX10 Hex Key
- TX15 Hex Key
Instructions:
Attach the stepper motor to motor slot, then insert slotted gear to the stepper. You'll need to sand the motor shaft to make sure it fits easily. Then, cut two pieces of 32.5cm rods. Drill two ends of the rods, according to motor slots' hole positions. Insert the rods to motor slot part, then attach print head to the rods. Next, attach the second slot to the rods. You may wish to screw slots to the rods, but it is not very critical.
In the second stage, cut 72.5cm belt, and drill its ends according to the belt cap's hole positions. Screw the belt cap to the belts. The top part will be ready.
Step 7: X-Meets-YOur final move on the mechanical side will be combining all the parts together.
Required Parts:
- 8x115mm Rod x 4
Instructions:
Cut four 11.5cm rods, and insert them to the bottom slot holes. Attach top part to the rods. You may also wish to screw the rods, but it will eliminate the mobility of the device. So, it is up to you. (I'm using without the screws.)
Step 8: ElectronicsWe use Raspberry Pi 2 to control Pancake Printer. You're free to choose the stepper motor controller. It is better if the driver is capable of driving in microstepping mode.
Required Parts:
- Raspberry Pi 2 x 1
- Microsoft Xbox 360 Wired Gamepad x 1
- Moons NEMA 17 Bipolar Stepper Motor x 3
- Microstepping Motor Driver x 3
- Connecting Cables
- 24V 6A Power Supply x 1
- Micro Servo Motor (e.g. Hitec HS-53) x 1
Instructions:
First, connect servo motor cables to Raspberry. Here is the connections:
- Servo +5V -> Raspberry +5V
- Servo GND -> Raspberry GND
- Servo Signal -> Raspberry Pin 13 (GPIO 27)
Then, connect stepper motor drivers to Raspberry.
- X Drivers +5V -> Raspberry +5V
- X Drivers GND -> Raspberry GND
- X Drivers EN-> Raspberry 12 (GPIO 18)
- X Drivers DIR -> Raspberry 18 (GPIO 24)
- X Drivers STEP -> Raspberry 16 (GPIO 23)
- X Drivers +24V -> Power Supply +24V
- X Drivers GND / -24V -> Power Supply GND
- Y Driver +5V -> Raspberry +5V
- Y Driver GND -> Raspberry GND
- Y Driver EN-> Raspberry 28 (GPIO 1)
- Y Driver DIR -> Raspberry 36 (GPIO 16)
- Y Driver STEP -> Raspberry 32 (GPIO 12)
- Y Driver +24V -> Power Supply +24V
- Y Driver GND / -24V -> Power Supply GND
Finally, connect stepper motors to the drivers. The important thing is, X motors should turn to different directions. So, connect motor cables accordingly.
Step 9: FirmwarePancake Printer's firmware is responsible for controlling X and Y stepper motors and the valve mechanism. It is a Universal Windows Platform (UWP) application written in C# language. What you need is installing Windows 10 IoT core for Raspberry Pi 2, and then deploying the application. You may also wish to set the application as start-up via the Windows 10 IoT Core's web panel > apps section.
The GitHub link for the app is https://github.com/uerkal/PancakePrinter
All you need to do is connecting the cables, attaching a gamepad to Raspberry Pi 2 and then deploying the application.
You may use Visual Studio Community 2015 to open, edit and deploy the application.
If you need help about Windows 10 IoT Core, use following getting started link: http://ms-iot.github.io/content/en-US/GetStarted.h...
Happy printings!





Comments
Please log in or sign up to comment.