

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
Old aged peoples, Alzheimer's affected ones, persons with heart problems always need a attention. If they do heavy work, skipping their food, etc, will affect the health condition of these persons much more.
Consider old age people lives in their home alone during day time because their son/daughter goes to work and grand children's goes to school. During these times no one will be there to take care or them. Even if they fall down, a mild stroke occurs, temperature increases the first aid will only get when someone notice it, it may take long time since no one is there. This may lead to situations that we loose them.
To overcome this situation I invented the Health band. It monitor the motions and status of the person, heart beat rate, temperature, up-to-date. If the there seems A Sudden fall due to heart attacks or loosing balance, or abnormal fall or rise in heart beat rate it alters the near by ones of the person to get immediate attention, the Health band also measures the temperature of the person in order to understand the person health condition.
Thus by the smart Heath band we can take care Of our beloved ones from any were In the world.
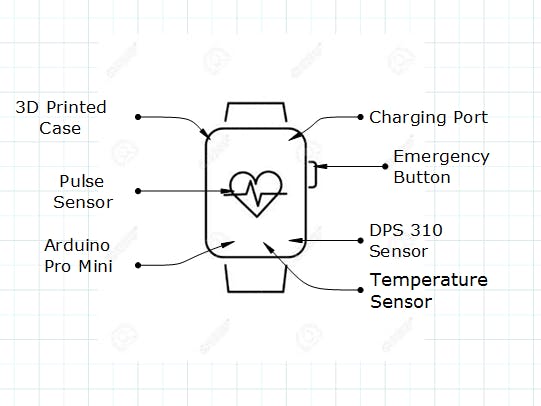
Components In The Life BandDPS310
The Life Band consists of DPS310 a miniaturized digital barometric pressure sensor that offers high accuracy, low current consumption. It measures the attitude with high accuracy thus by the tiny sensor we can understand the present position of the person.
Functions Of DPS310Old aged people, Alzheimer's affected ones, persons with heart problems, will have a chance of falling down due to heart attacks, loosing balance, etc. in this case the DPS310 sensor sense the change altitude. Thus by this efficiency of the sensor we can determine a fall has occurred. Thus the Life Band sends a message to the relatives in order to provide medical attention before the condition goes worse. Most of cases late attention to the affected person results in loosing of that person for ever.
Due to high accuracy of the DPS310 it can even measure a small change in the altitude thus by looking to the above graph we can see that the altitude is decreasing in a proportional way. Thus we can understand whether person is climbing up or down the steps
By the DPS 310 and its accuracy we can determine in which floor does the person stands.
Pulse Sensor
If the there seems abnormal fall or rise in heart beat rate LIFE BAND alters the near by ones of the person to get immediate attention, the Health band also measures the temperature of the person in order to understand the person health condition.
There is a emergency button in the Health band that the person can press it in the situation were he needs a immediate medical attention or help assistance, then the band sends the alert to the caretaker's and the near by ones.
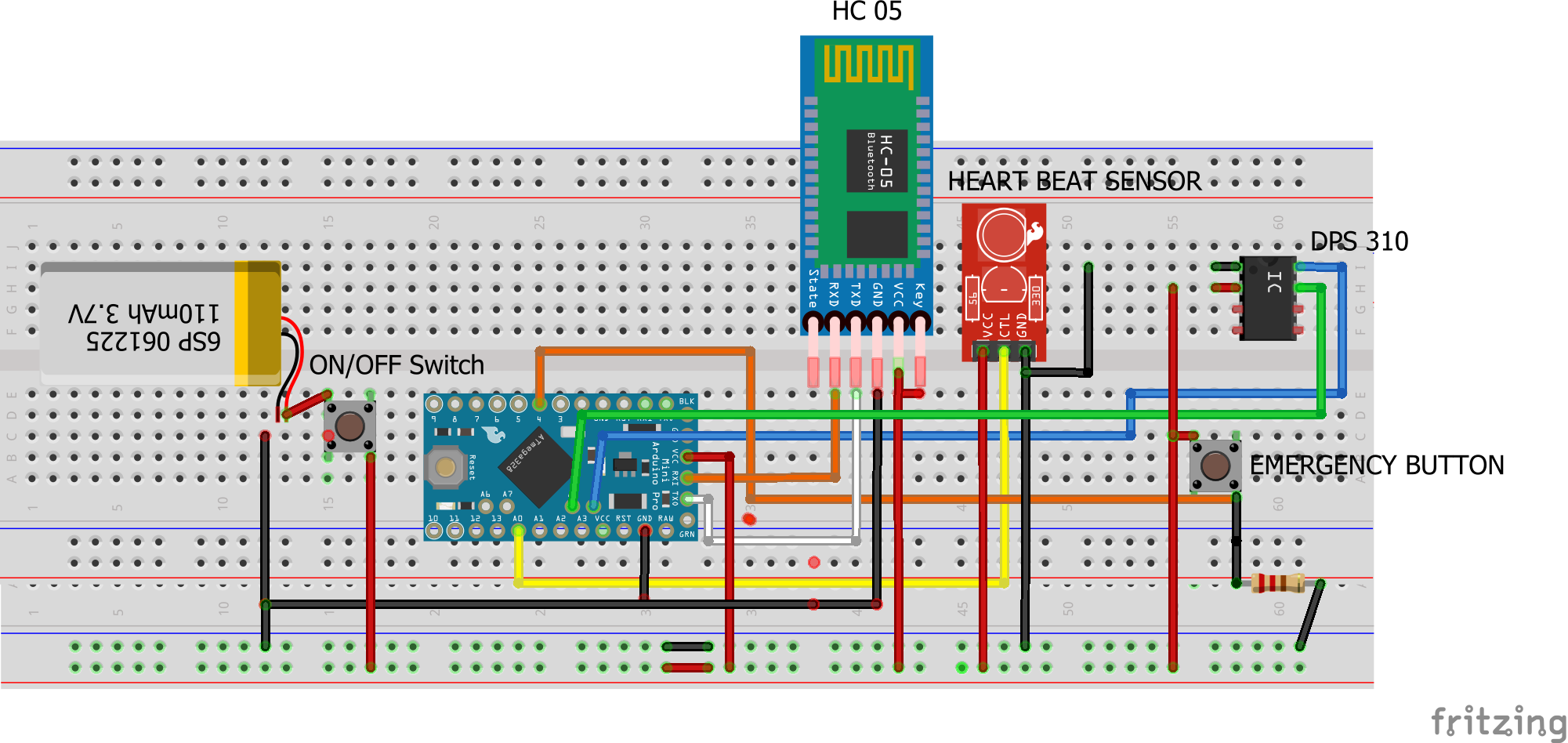
CircuitIn the Life band it consist of DPS 310 Sensor, Arduino pro mini, Pulse Sensor, Bluetooth, Emergency button.
PinsDPS310
DPS 310 USES I2C CONNECTION FOR DATA TRANSFER
- DPS 310 - SCL => ARDUINO ANALOG PIN -A5
- DPS 310- SDA=>ARDUINO ANALOG PIN -A4
- DPS 310 - GND=> GND on Arduino
- Connect dps310 GND pin to arduino promini ground
PULSE SENSOR
- VCC =>3v3 on Arduino
- OUT=>ARDUINO ANALOG PIN-A0
- GND=>ARDUINO GND PIN
There are many way to connect the band to the web such as ESP8266 or blue tooth. Why I choose Bluetooth is that it only draws less current compared to the esp8266. By using Bluetooth we get longer battery life. (If you have any BLE such as RN4677 used in the DPS310 prefer that its very ultra power saving one).
- VCC=>3v3 on Arduino
- RX=> ARDUINO Digital PIN 2
- TX=>ARDUINO Digital Pin 3
- EN=>3v3 on Arduino
- GND=>GND
Connection:
Before we can upload the sketch to the Mini, you’ll need to tell Arduino what board you’re using. Go to Tools > Board and select Arduino Pro or Pro Mini
Then, go back up to Tools > Processor and select ATmega328 (3.3V, 8MHz) This tells Arduino to compile the code with an 8MHz clock speed
Now tools>programer>ARDUINOSPI
Now upload the code to arduino pro-mini
LibrariesWe need some libraries to be installed in the Arduino. Download the following libraries:
- #DPS310 Pressure Sensor library https://github.com/Infineon/DPS310-Pressure-Sensor
- #BLYNK LIBRARY https://github.com/blynkkk/blynk-library
Adding library to ARDUINO IDE
Next click on add .ZIP library. Now go to the folder were you have stored the files that you downloaded and click open. Repeat the same steps for the reaming libraries.
Blynk AppBlynk is a Platform with iOS and Android apps to control Arduino, Raspberry Pi and the likes over the Internet. It's a digital dashboard where you can build a graphic interface for your project by simply dragging and dropping widgets.
Download the app from play store then:
Click on NEW PROJECT:
Select ARDUINO PRO MINI from BOARDS and connection types as BLUETOOTH
Now you get TOKEN number that will be send to your registered email copy that and paste it in code in place of "YOURTOKEN"
- =>From the Widget box in the blynk app select =>BLUETOOTH
- =>hen scan for your life band bluetooth .
- =>select the life band and the default password will be "1234"
and connect,now your band and phone are connected.
3D printed caseThe .stl file is added in this project you can download it and print the case. In the case there a circle hole in the center to place the pulse sensor, in side there is a charging port, in the other side there is ON/OFF switch:
There is watch strap holder there you can add a watch strap:
3d PRINTING THE CASE OF LIFE BAND
ASSEMBLING THE SENSORS
PLACING ALL IN THE CASE
FINISH!






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments