


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
1. Download Arduino IDE
2. Download Processing IDE
3. Open Arduino IDE and load code downloaded from here.
4. Open Processing IDE and load code downloaded from here.
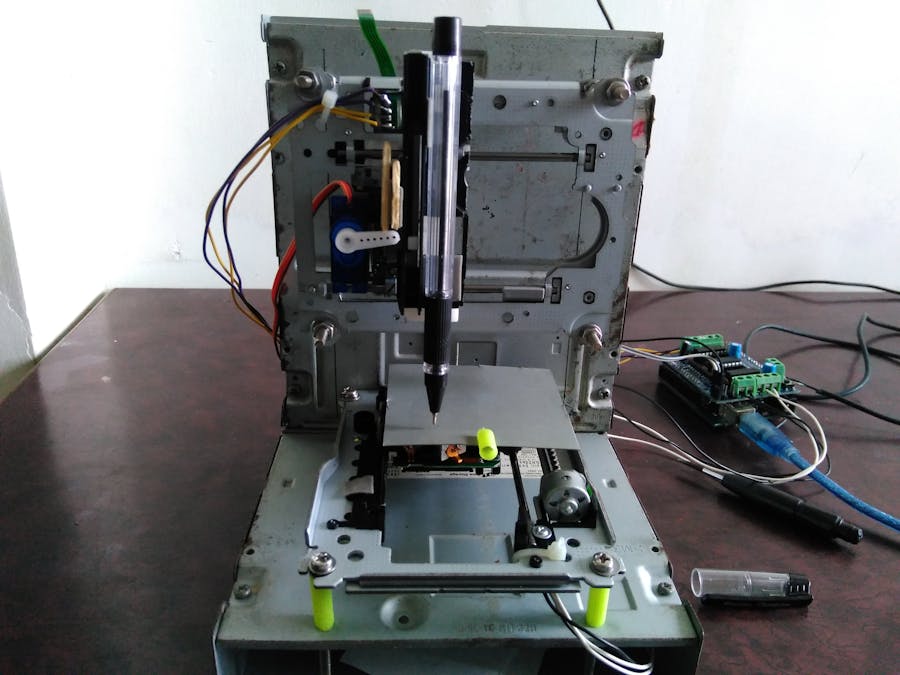
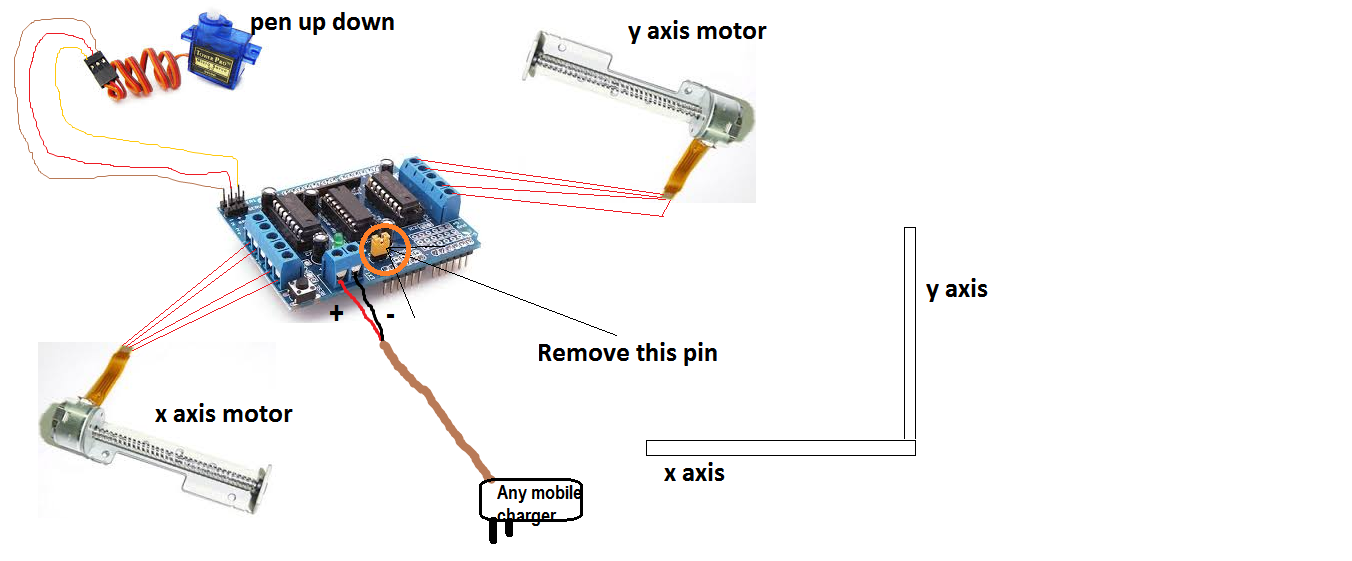
Open the scrap DVD Drive and remove internal moving tray. This tray having stepper mechanism on it, will act as our X-axis & Y-axis. Go through the attached pictures for understanding how to assemble your machine. Make hole on empty DVD drive case mount our X-axis and Y-axis on respective DVD case with the help of nut bolts.
Now place them perpendicularly to each other.
G codeTo make g-code files that are compatible with this CNC machine you have to use the Inkscape.
Inkscape is a professional quality vector graphics software which runs on Windows, Mac OS X and Linux. It is used by design professionals and hobbyists worldwide, for creating a wide variety of graphics such as illustrations, icons, logos, diagrams, maps and web graphics. Inkscape uses the W3C open standard SVG (Scalable Vector Graphics) as its native format, and is free and open-source software. Download and install Inkscape from here.
(Important: download 0.48.5 version) Now you need to install an Add-on that enables the export images to g-code files. This add on can be found here with installation notes.
Please follow the video on YouTube how to create G-code file.
- Upload the gctrl file to processing IDE and click on PLAY button in processing window.
- First press 'p' to select your communication port
- If you want you can set jog speed by pressing 1,2, or 3 button from keyboard
- Press 'g' to load G-code file
- Your machine is ready to plot as soon as you hit enter by selecting g-code file
Now your plotter is ready. Some ready made G-code file download links:
Thanks for your attention! Visit this link for complete illustration.
Video to see machine live:





{kind=link}
Comments
Please log in or sign up to comment.