



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 2 | ||||
| × | 4 | ||||
Software apps and online services | ||||||
 |
| |||||
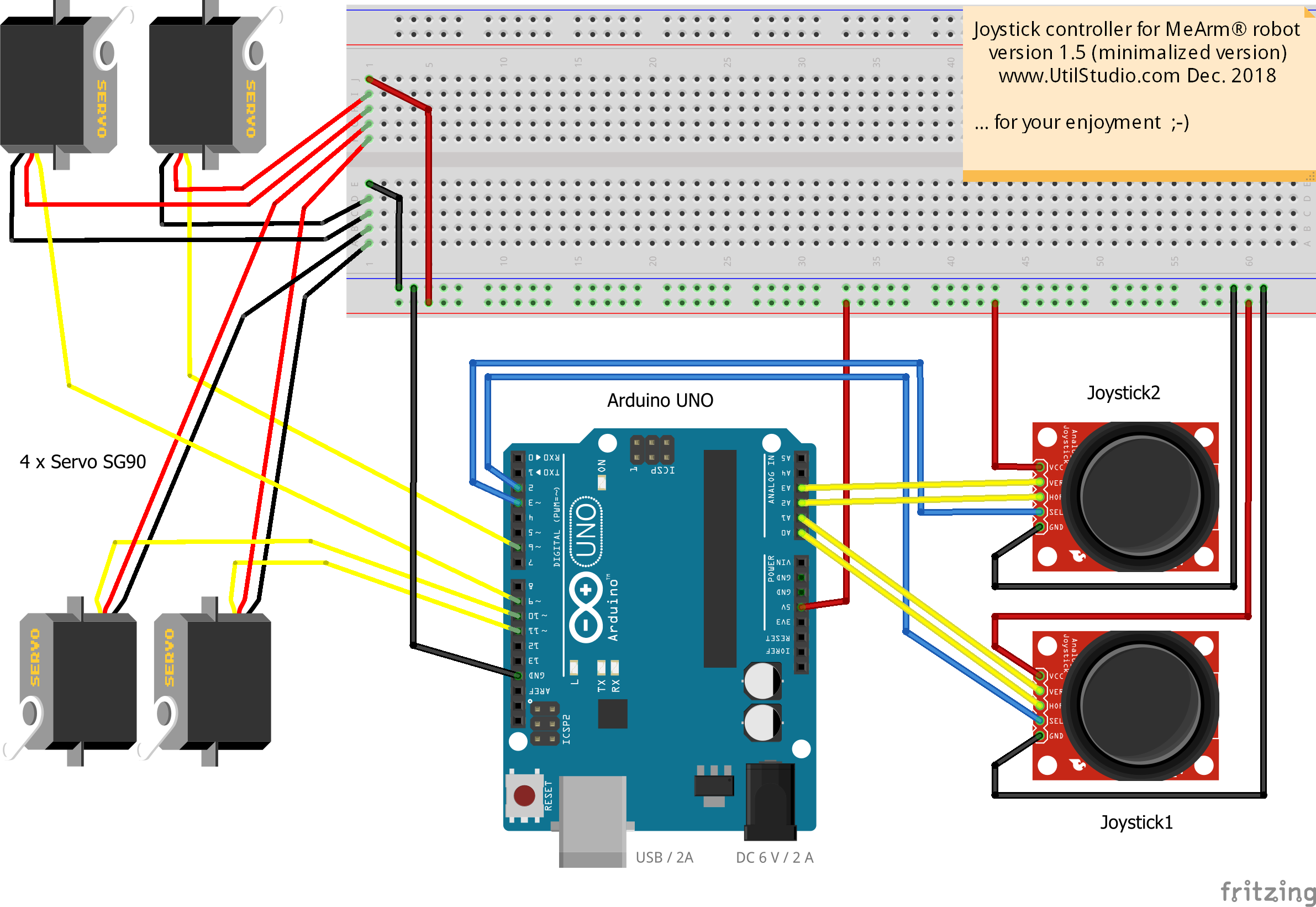
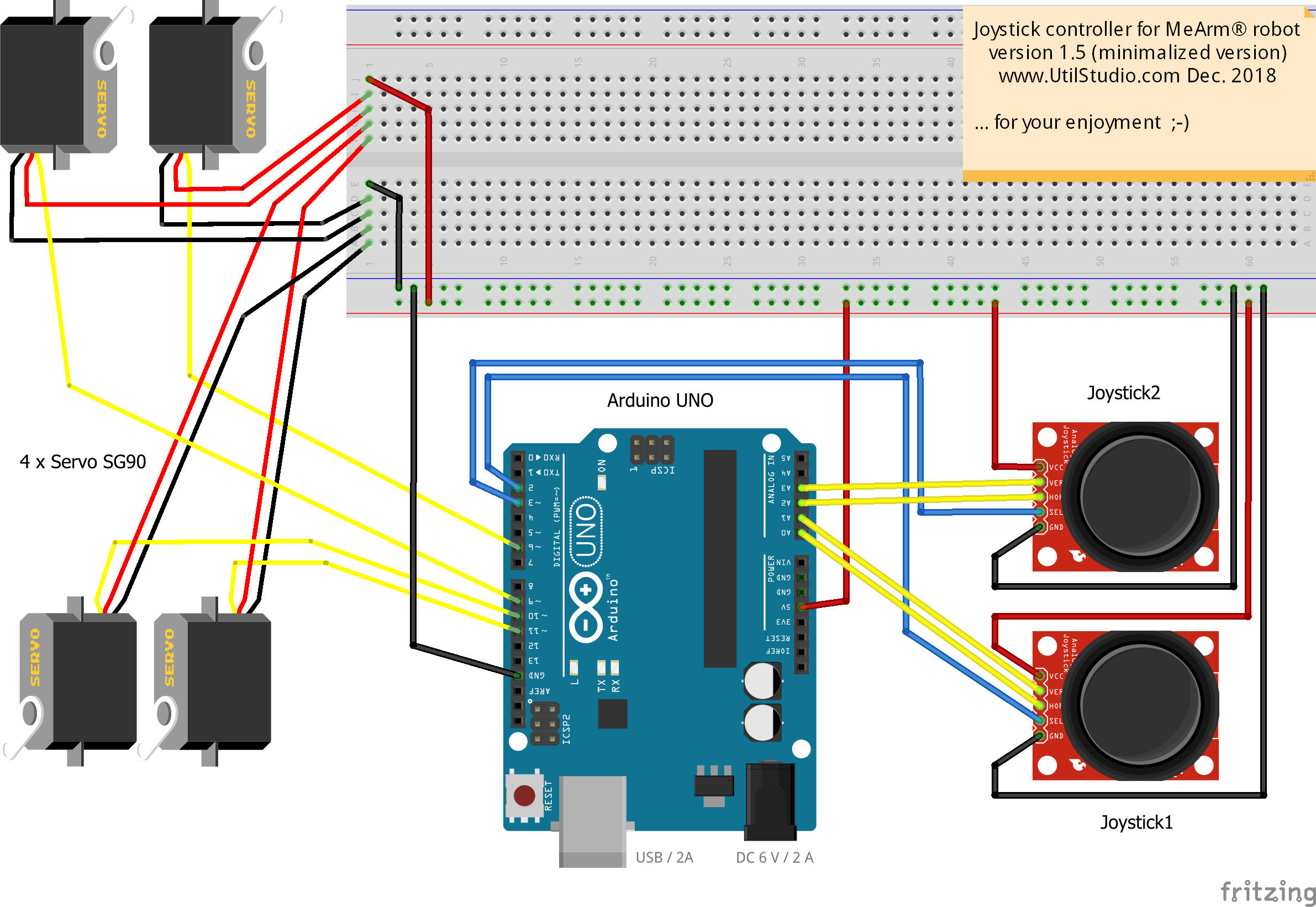
This is minimalised version of older project Joystick Controller for MeArm ® Robot - Recording Coordinates. It does not require additional resistors or led diode. Just only Arduino UNO, 2 joysticks and 4 servos and meArm construction or similar one of course.
Allows 4 modes:
- Manual mode
- Recording of coordinates - indicated by permanent light of LED diode "L" on Arduino UNO board.
- Play mode - play once recorded movements
- Play repeatedly - plays recorded movements repeatedly - indicated by flashing of LED diode "L".
Press button on joistick 1 to Start/Stop of recording coordinates.
Press button on joistick 2 to Start/Stop of play coordinates.
Press and hold button for 2 seconds on joistick 2 to Start/Stop of play coordinates repeatedly.
If you have a MeArm joystick board, here is a version for you: MeArm 1.6.1 Robot Joystick Board Recording Movements (IR)
Source code of MeArm ® robot recording of coordinates (minimalized version)
ArduinoIn version 1.5.4 was replaced an external resistors by internal pull up resistors.
External LED diode was replaced with using internal "L" diode on Arduino UNO board.
External LED diode was replaced with using internal "L" diode on Arduino UNO board.
/* meArm analog joysticks version 1.5.4 - UtilStudio.com Dec 2018
Uses two analogue joysticks and four servos.
In version 1.5.4 was replaced an external resistors by internal pull up resistors.
External LED diode was replaced with using internal "L" diode on Arduino UNO board.
Some bugs was removed.
First joystick moves gripper forwards, backwards, left and right,
button start/stop recording positions.
Second joystick moves gripper up, down, and closes and opens,
button start/stop playing recorded positions.
Press button for 2 seconds to autoplay.
Pins:
Arduino Stick1 Stick2 Base Shoulder Elbow Gripper Record/
GND GND GND Brown Brown Brown Brown Auto play
5V VCC VCC Red Red Red Red LED
A0 HOR
A1 VER
PD2 BUTT
A2 HOR
A3 VER
PD3 BUTT
11 Yellow
10 Yellow
9 Yellow
6 Yellow
13 X
*/
#include <Servo.h>
bool repeatePlaying = false; /* Repeatedly is running recorded cycle */
int delayBetweenCycles = 2000; /* Delay between cycles */
int basePin = 11; /* Base servo */
int shoulderPin = 10; /* Shoulder servo */
int elbowPin = 9; /* Elbow servo */
int gripperPin = 6; /* Gripper servo */
int xdirPin = 0; /* Base - joystick1*/
int ydirPin = 1; /* Shoulder - joystick1 */
int zdirPin = 3; /* Elbow - joystick2 */
int gdirPin = 2; /* Gripper - joystick2 */
//int pinRecord = A4; /* Button record - backward compatibility */
//int pinPlay = A5; /* Button play - backward compatibility */
int pinRecord = PD2; /* Button record - recommended (A4 is deprecated, will by used for additional joystick) */
int pinPlay = PD3; /* Button play - recommended (A5 is deprecated, will by used for additional joystick) */
int pinLedRecord = 13; /* LED - indicates recording (light) or auto play mode (blink ones) */
const int buffSize = 512; /* Size of recording buffer */
int startBase = 90;
int startShoulder = 90;
int startElbow = 90;
int startGripper = 0;
int posBase = 90;
int posShoulder = 90;
int posElbow = 90;
int posGripper = 0;
int lastBase = 90;
int lastShoulder = 90;
int lastElbow = 90;
int lastGripper = 90;
int minBase = 0;
int maxBase = 150;
int minShoulder = 0;
int maxShoulder = 150;
int minElbow = 0;
int maxElbow = 150;
int minGripper = 0;
int maxGripper = 150;
const int countServo = 4;
int buff[buffSize];
int buffAdd[countServo];
int recPos = 0;
int playPos = 0;
int buttonRecord = HIGH;
int buttonPlay = HIGH;
int buttonRecordLast = LOW;
int buttonPlayLast = LOW;
bool record = false;
bool play = false;
bool debug = false;
String command = "Manual";
int printPos = 0;
int buttonPlayDelay = 20;
int buttonPlayCount = 0;
bool ledLight = false;
Servo servoBase;
Servo servoShoulder;
Servo servoElbow;
Servo servoGripper;
void setup() {
Serial.begin(9600);
pinMode(xdirPin, INPUT);
pinMode(ydirPin, INPUT);
pinMode(zdirPin, INPUT);
pinMode(gdirPin, INPUT);
pinMode(pinRecord, INPUT_PULLUP);
pinMode(pinPlay, INPUT_PULLUP);
pinMode(pinLedRecord, OUTPUT);
servoBase.attach(basePin);
servoShoulder.attach(shoulderPin);
servoElbow.attach(elbowPin);
servoGripper.attach(gripperPin);
StartPosition();
digitalWrite(pinLedRecord, HIGH);
delay(1000);
digitalWrite(pinLedRecord, LOW);
}
void loop() {
buttonRecord = digitalRead(pinRecord);
buttonPlay = digitalRead(pinPlay);
// Serial.print(buttonRecord);
// Serial.print("\t");
// Serial.println(buttonPlay);
// for testing purposes
if (buttonPlay == LOW)
{
buttonPlayCount++;
if (buttonPlayCount >= buttonPlayDelay)
{
repeatePlaying = true;
}
}
else buttonPlayCount = 0;
if (buttonPlay != buttonPlayLast)
{
if (record)
{
record = false;
}
if (buttonPlay == LOW)
{
play = !play;
repeatePlaying = false;
if (play)
{
StartPosition();
}
}
}
if (buttonRecord != buttonRecordLast)
{
if (buttonRecord == LOW)
{
record = !record;
if (record)
{
play = false;
repeatePlaying = false;
recPos = 0;
}
else
{
if (debug) PrintBuffer();
}
}
}
buttonPlayLast = buttonPlay;
buttonRecordLast = buttonRecord;
float dx = map(analogRead(xdirPin), 0, 1023, -5.0, 5.0);
float dy = map(analogRead(ydirPin), 0, 1023, 5.0, -5.0);
float dz = map(analogRead(zdirPin), 0, 1023, 5.0, -5.0);
float dg = map(analogRead(gdirPin), 0, 1023, 5.0, -5.0);
if (abs(dx) < 1.5) dx = 0;
if (abs(dy) < 1.5) dy = 0;
if (abs(dz) < 1.5) dz = 0;
if (abs(dg) < 1.5) dg = 0;
posBase += dx;
posShoulder += dy;
posElbow += dz;
posGripper += dg;
if (play)
{
if (playPos >= recPos) {
playPos = 0;
if (repeatePlaying)
{
delay(delayBetweenCycles);
StartPosition();
}
else
{
play = false;
}
}
bool endOfData = false;
while (!endOfData)
{
if (playPos >= buffSize - 1) break;
if (playPos >= recPos) break;
int data = buff[playPos];
int angle = data & 0xFFF;
int servoNumber = data & 0x3000;
endOfData = data & 0x4000;
switch (servoNumber)
{
case 0x0000:
posBase = angle;
break;
case 0x1000:
posShoulder = angle;
break;
case 0x2000:
posElbow = angle;
break;
case 0x3000:
posGripper = angle;
dg = posGripper - lastGripper;
break;
}
playPos++;
}
}
if (posBase > maxBase) posBase = maxBase;
if (posShoulder > maxShoulder) posShoulder = maxShoulder;
if (posElbow > maxElbow) posElbow = maxElbow;
if (posGripper > maxGripper) posGripper = maxGripper;
if (posBase < minBase) posBase = minBase;
if (posShoulder < minShoulder) posShoulder = minShoulder;
if (posElbow < minElbow) posElbow = minElbow;
if (posGripper < minGripper) posGripper = minGripper;
servoBase.write(posBase);
servoShoulder.write(posShoulder);
servoElbow.write(posElbow);
// if (dg < -3.0) {
// posGripper = minGripper;
// servoGripper.write(posGripper);
// Serial.println(posGripper);
// }
// else if (dg > 3.0) {
// posGripper = maxGripper;
// servoGripper.write(posGripper);
// Serial.println(posGripper);
// }
bool waitGripper = false;
if (dg < 0) {
posGripper = minGripper;
waitGripper = true;
}
else if (dg > 0) {
posGripper = maxGripper;
waitGripper = true;
}
servoGripper.write(posGripper);
if (play && waitGripper)
{
delay(1000);
}
//Serial.println(posGripper);
if ((lastBase != posBase) | (lastShoulder != posShoulder) | (lastElbow != posElbow) | (lastGripper != posGripper))
{
if (record)
{
if (recPos < buffSize - countServo)
{
int buffPos = 0;
if (lastBase != posBase)
{
buffAdd[buffPos] = posBase;
buffPos++;
}
if (lastShoulder != posShoulder)
{
buffAdd[buffPos] = posShoulder | 0x1000;
buffPos++;
}
if (lastElbow != posElbow)
{
buffAdd[buffPos] = posElbow | 0x2000;
buffPos++;
}
if (lastGripper != posGripper)
{
buffAdd[buffPos] = posGripper | 0x3000;
buffPos++;
}
buffAdd[buffPos - 1] = buffAdd[buffPos - 1] | 0x4000;
for (int i = 0; i < buffPos; i++)
{
buff[recPos + i] = buffAdd[i];
}
recPos += buffPos;
}
}
command = "Manual";
printPos = 0;
if (play)
{
command = "Play";
printPos = playPos;
}
else if (record)
{
command = "Record";
printPos = recPos;
}
Serial.print(command);
Serial.print("\t");
Serial.print(printPos);
Serial.print("\t");
Serial.print(posBase);
Serial.print("\t");
Serial.print(posShoulder);
Serial.print("\t");
Serial.print(posElbow);
Serial.print("\t");
Serial.print(posGripper);
Serial.print("\t");
Serial.print(record);
Serial.print("\t");
Serial.print(play);
Serial.println();
}
lastBase = posBase;
lastShoulder = posShoulder;
lastElbow = posElbow;
lastGripper = posGripper;
if ( repeatePlaying)
{
ledLight = !ledLight;
}
else
{
if (ledLight)
{
ledLight = false;
}
if (record)
{
ledLight = true;
}
};
digitalWrite(pinLedRecord, ledLight);
delay(50);
}
void PrintBuffer()
{
for (int i = 0; i < recPos; i++)
{
int data = buff[i];
int angle = data & 0xFFF;
int servoNumber = data & 0x3000;
bool endOfData = data & 0x4000;
Serial.print("Servo=");
Serial.print(servoNumber);
Serial.print("\tAngle=");
Serial.print(angle);
Serial.print("\tEnd=");
Serial.print(endOfData);
Serial.print("\tData=");
Serial.print(data, BIN);
Serial.println();
}
}
void StartPosition()
{
int angleBase = servoBase.read();
int angleShoulder = servoShoulder.read();
int angleElbow = servoElbow.read();
int angleGripper = servoGripper.read();
Serial.print(angleBase);
Serial.print("\t");
Serial.print(angleShoulder);
Serial.print("\t");
Serial.print(angleElbow);
Serial.print("\t");
Serial.print(angleGripper);
Serial.println("\t");
posBase = startBase;
posShoulder = startShoulder;
posElbow = startElbow;
posGripper = startGripper;
servoBase.write(posBase);
servoShoulder.write(posShoulder);
servoElbow.write(posElbow);
servoGripper.write(posGripper);
}
Pin mapping for board "MeArm Joystick v 1.6.1"
ArduinoIf you use joystick board "MeArm Joystick v 1.6.1", then replace in source code pin mappings with attached code.
int basePin = 11; /* Base servo */
int shoulderPin = 10; /* Shoulder servo */
int elbowPin = 9; /* Elbow servo */
int gripperPin = 5; /* Gripper servo - changed */
int xdirPin = 0; /* Base - joystick1*/
int ydirPin = 1; /* Shoulder - joystick1 */
int zdirPin = 3; /* Elbow - joystick2 */
int gdirPin = 2; /* Gripper - joystick2 */
int pinRecord = PD2; /* Button record - recommended (A4 is deprecated, will by used for additional joystick) */
int pinPlay = PD4; /* Button play - recommended (A5 is deprecated, will by used for additional joystick) - changed */
int pinLedRecord = PD3; /* LED - indicates recording (light) or auto play mode (blink ones) - changed */




{kind=link}
Comments
Please log in or sign up to comment.