



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
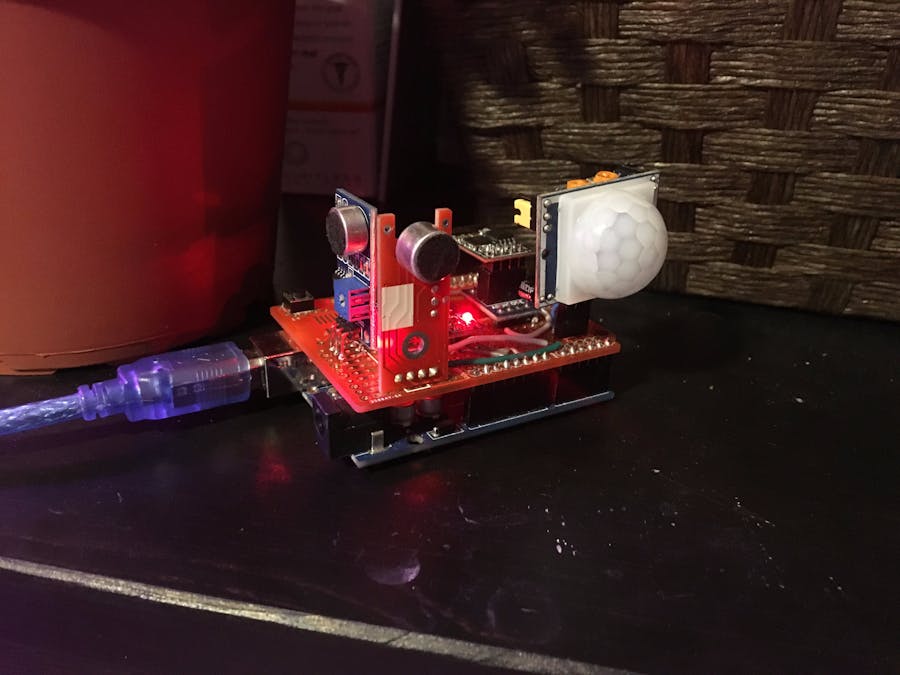
BarkBox! This is a device that simply listens for loud sounds, like barking, and looks for motion present and records the events. I created this project because one day I came home to my dog barking and thought how long had he been barking. I could hear him down the hall when I walked into the building. I live in condos btw so I don't need him barking all day long and making my neighbors upset. Or more to the point why is he barking??? So I thought, "Hey, I got these mic boards laying around from a sensor kit; lets see if I can catch if he is doing it a lot! Oh and I got this PIR motion detector, lets slap that on also!"
When i created the first iteration it only had one mic board for sound detection but I was having problems with it either being way too sensitive or not sensitive enough. I couldn't find the 'sweet spot'. So my solution was to not only add another mic, but to add adjustable thresholds for when they consider the reading to in fact be barking. I have one mic board turn pretty sensitive but with a higher threshold and the other with low gain and a lower threshold. It works pretty good together. Also on the first iteration I had a lot of problems with the mics picking up the radio rx/tx because it was so close to the esp8266 module. It also created voltage fluctuations slightly which wasn't helping. I added 2 capacitors & lowered the esp8266 tx power and it almost got rid of it all. Just recently when I was testing a couple new ESP8266-01S chips, i noticed that the "S" chips completely eliminated the noise from the tx signal & voltage fluctuations. Yay
The settings/how to run it are as follows:
Buttons
- Arm - resets all counts & starts recording event counts for motion & sound. Both mics must detect the sound at once for it to register as a bark.
- Notify - turns on text messaging & will send a text when motion is detected.
- Raw Values? - This live updates the raw values to the dashboard - This WILL slow down polling interval of the mics/motion substantially possibly missing barks or motion events. Just to test & see your average levels
After some playing around with the threshold settings I got it pretty tuned in to identifying when he is barking or not. Turns out overall he is a good dog.
What's ConnectedThis project currently used: Arduino Uno R3 ESP8266-01S 2x Analog sound microphones Motion Detector HC-SR501 plus some small parts- AMS1117, capacitors, etc...
Triggers & AlertsI didn't use too much for alerts or triggers with this project. Just one trigger that is used for notifying me, if intrusion/motion is detected & I have the "notify me" button enabled. I may add a LED on the board to indicate when motion is detected or bark detected. Maybe a Neopixel strip that also counts the events?
SchedulingI have the device arm itself everyday at 9am and disarm at 4pm otherwise I always forget to turn it on and then it won't keep count.
Dashboard Screenshotsno video yet...
Code#include <CayenneESP8266Shield.h>
char token[] = "your token here";
char ssid[] = "your wifi";
char password[] = "your wifi password here";
#define EspSerial Serial
#define ESP8266_BAUD 115200
ESP8266 wifi(EspSerial);
const int barkPin1 = A1;
const int barkPin2 = A0;
const int motionPin = 3;
int barkLevel1;
int barkLevel2;
int threshold1;
int threshold2;
int armed;
int barking1 = 0;
int barking2 = 0;
int trueBark = 0;
int showRaw;
int motion = 0;
int notify;
int prevMotion = 0;
int motionDetects = 0;
void setup()
{
EspSerial.begin(ESP8266_BAUD);
delay(10);
// Serial1.begin(9600);
Cayenne.begin(token, wifi, ssid, password);
Cayenne.virtualWrite(V13, 0);
Cayenne.virtualWrite(V11, 0);
pinMode(barkPin1, INPUT);
pinMode(barkPin2, INPUT);
pinMode(motionPin, INPUT);
}
void loop()
{
Cayenne.run();
prevMotion = motion;
barkLevel1 = 530 - analogRead(barkPin1); //set your mics values here
barkLevel2 = 1023 - analogRead(barkPin2); //set your mics values here
motion = digitalRead(motionPin);
if (motion != prevMotion)
{
Cayenne.virtualWrite(V10, motion);
if (armed == 1)
{
if (prevMotion == 0)
{
motionDetects++;
Cayenne.virtualWrite(V11, motionDetects);
}
if (notify == 1)
{
Cayenne.virtualWrite(V13, 1);
}
else
{
Cayenne.virtualWrite(V13, 0);
}
}
}
if (showRaw == 1)
{
Cayenne.virtualWrite(V8, barkLevel1);
Cayenne.virtualWrite(V9, barkLevel2);
}
if (armed == 1)
{
if (barkLevel1 > threshold1)
{
barking1++;
Cayenne.virtualWrite(V2, barking1);
}
if (barkLevel2 > threshold2)
{
barking2++;
Cayenne.virtualWrite(V5, barking2);
}
if (barkLevel1 > threshold1 && barkLevel2 > threshold2)
{
trueBark++;
Cayenne.virtualWrite(V6, trueBark);
}
// Serial1.print(barkLevel1);
// Serial1.print(" ");
// Serial1.println(threshold2);
}
}
CAYENNE_IN(V1)
{
armed = getValue.asInt();
if (armed == 1)
{
barking1 = 0;
barking2 = 0;
trueBark = 0;
motionDetects = 0;
Cayenne.virtualWrite(V2, 0);
Cayenne.virtualWrite(V5, 0);
Cayenne.virtualWrite(V6, 0);
Cayenne.virtualWrite(V11, 0);
}
}
CAYENNE_IN(V3)
{
threshold1 = (getValue.asLong() / 1023);
}
CAYENNE_IN(V4)
{
threshold2 = (getValue.asLong() / 1023);
}
CAYENNE_IN(V7)
{
showRaw = getValue.asInt();
}
CAYENNE_IN(V12)
{
notify = getValue.asInt();
}
vapor83
 Benny Estes
Benny Estes



Comments
Please log in or sign up to comment.