


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 10 | |||
| × | 2 | ||||
| × | 2 | ||||
Software apps and online services | ||||||
 |
| |||||
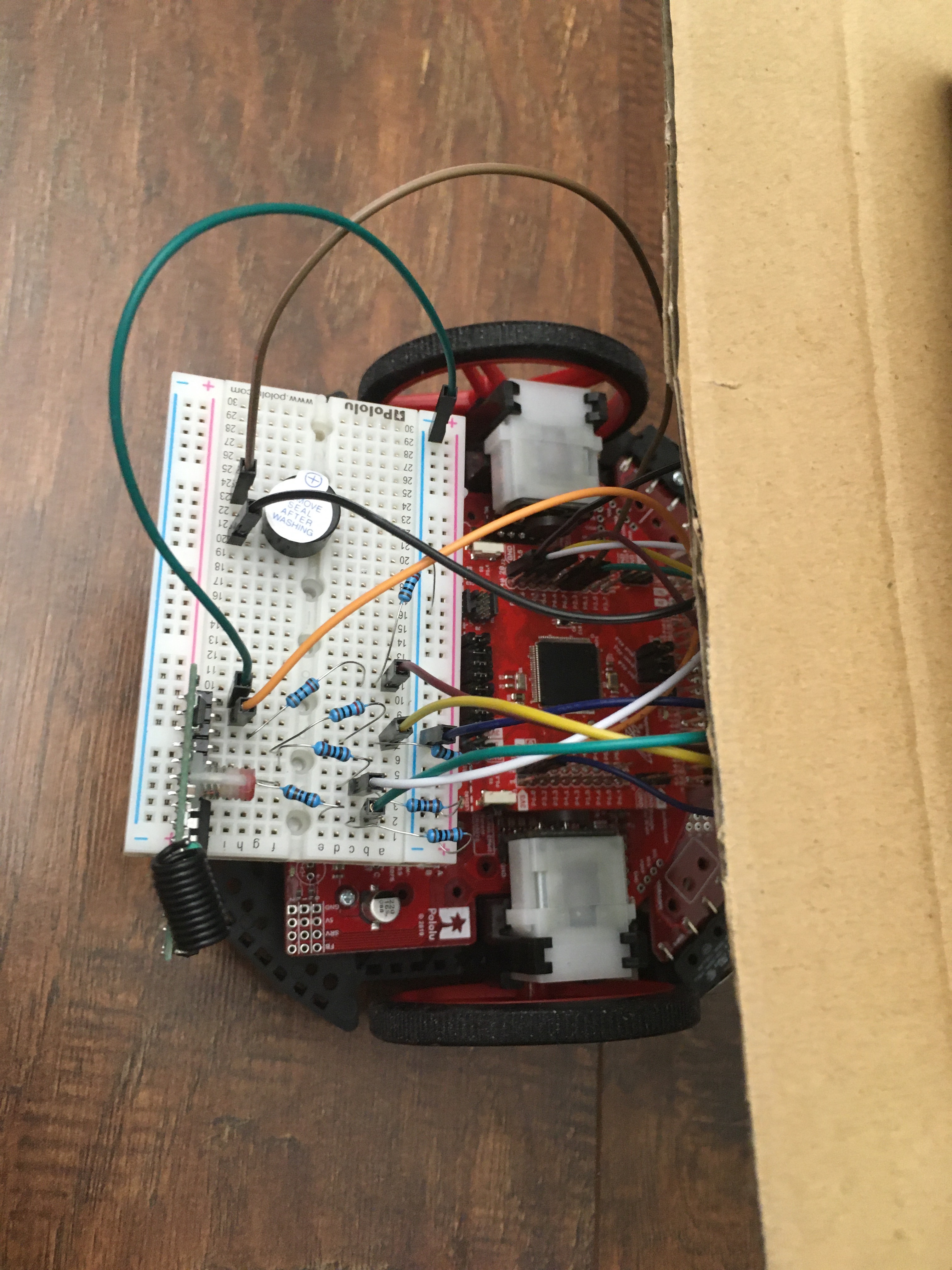
RoboMe is a line-following robot that carries medicine from a dispenser to a patient in bed by following a line placed between the two locations.
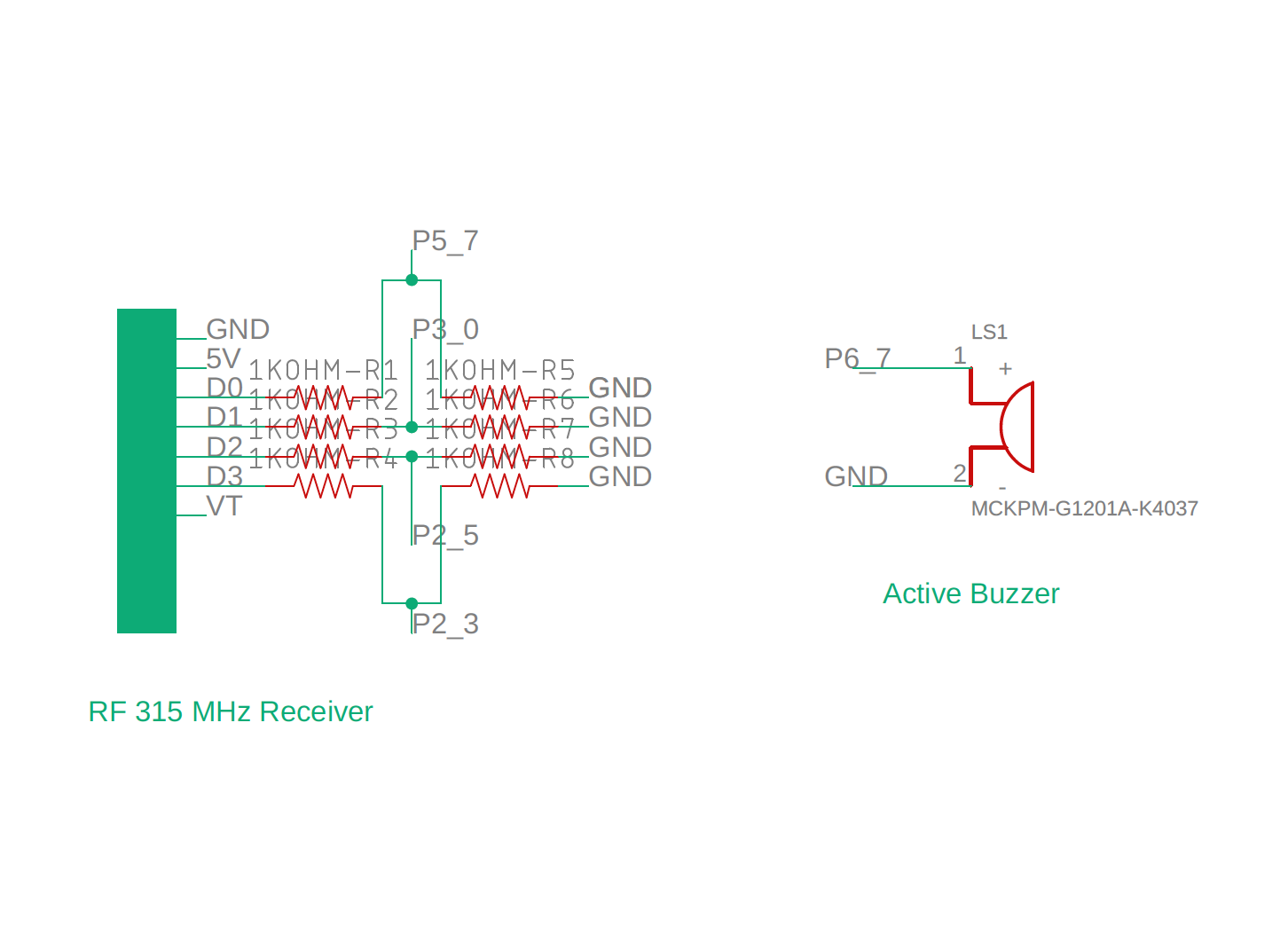
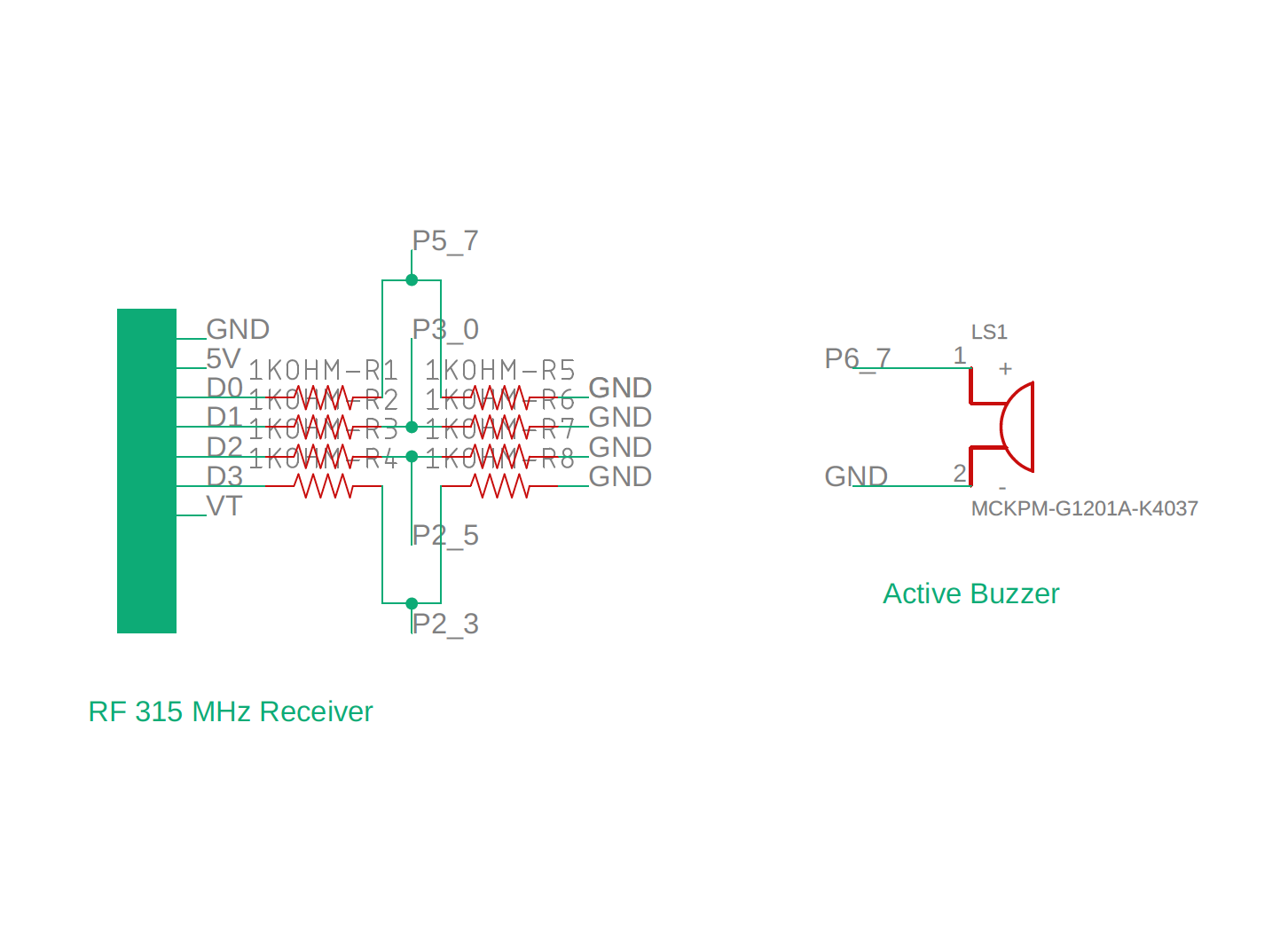
A breadboard with an RF Receiver and a buzzer is connected to the robot (the TI-RSLK Max). The buzzer is programmed to sound whenever the bump sensors bump into an object in front of the robot. The RF Receiver receives communication from a 4 Button RF Remote.
On pressing each button, the remote communicates with the RF receiver on the robot and tells the robot to perform the following actions:
- A - Follow Line
- B - Turn Right
- C - Move Forward
- D - Move Backward
The B, C, and D buttons are all for manual driving of the robot. Using the RF Remote makes it possible to control the robot from different rooms even if there are obstacles in between!
Line Following:
Manual Control:
Future Plans:
I will work on programming the robot to follow the path at specific times every day such as a pre-determined time when the user is required to take their medicine. I also will work on an extendable tray table that can be adjusted to reach different heights. This could help reach a patient's bed and could be changed manually as well. I will also try out different speeds, especially for the line following, and have the robot detect objects in any direction before bumping into them!
Thank You!
This project was part of the Texas Instruments Summer Project 2020. Thank you so much to our mentors Mr. Mark Easley and Mr. Christopher Roberts for all their guidance and encouragement!
The TI-RSLK Build Workshop project is also a very helpful resource: https://www.hackster.io/jason_rubadue/ti-rslk-build-workshop-instructions-ff82b7#code The code for this project is based on this as well!
Connections on Breadboard to Robot






{kind=link}
{kind=link}
Comments