


Hardware components | ||||||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
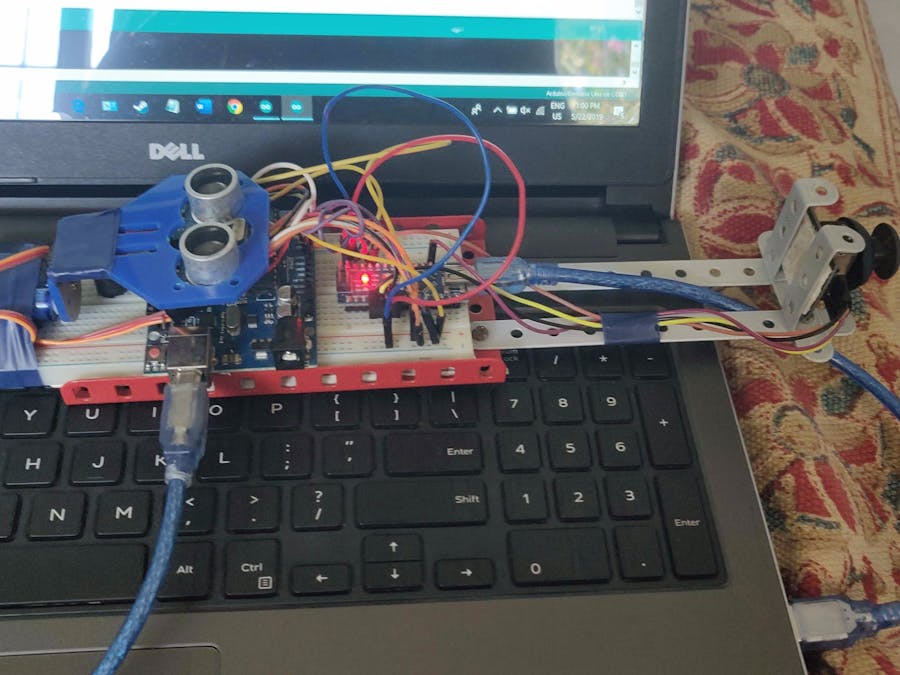
The project was a simple idea that I developed for a small workshop/competition in Semester 2 (January 2018).
The idea was developed around 2 boards i.e. Arduino Uno & Nano.
The Uno board ran the code for calculating the distance using an HC-SR04 (ultrasonic sensor) based on which it triggered a buzzer and the frequency of the buzzer would increase when the blind person approaches closer to the obstacle.
The Nano board had 2 goals :
- Power the Arduino Board using its 5V supply.
- To run the code for moving (sweeping) the servo motor on which the ultrasonic sensor was mounted and the I/p to the servo was given by a joystick module controlled by the blind person.
The reason why I ran the code 2 separate boards is because of the clock cycles wasted by calling an ultrasonic sensor routine for distance measurement made it very difficult for all other modules such as servo, joystick and buzzer to synchronise. When I ran the code on a single board for all the specified modules, the O/p was sometimes not accurate or it took too long for the practical application.
The idea that I had in mind was, that the ultrasonic sensor would detect the obstacle and trigger the buzzer for alert and the joystick would be used by the blind person to sweep an angle 0f 180 degrees to find wether there are any more obstacles in the vicinity.



Comments
Please log in or sign up to comment.