Introduction:
The reason we named the robot (Hero) due to COVID-19. Nowadays people are risking their life on sanitizing places, even though they are fully equipped or covered. Somehow they become infected by the virus but they are real life saving heroes to us. So we decided not to involve humans anymore instead we introduce robots on the field to save our valuable life. So we named our robot UV Hero.
Purpose of the robot:Purpose of the robot is to disinfect contaminated areas such as office, hospital, toilets, airport etc. it can be used without any human involvement and it can also disinfect specific areas like door knobs, switch boards, chair, table etc.
The above image is an example of office.
1 / 4 • designed in one and half square foot
we designed the robot about one and half foot area because most doors and stall are in two foot wide and 6.5ft tall.
Construction:1 / 3 • Follow the procedure to construct the robot.
- Drilling machine
- Spanners
- Screw drivers
- Glue gun
- Aluminum spot welder
- Jig saw
- Measuring tape
- Rubber adhesive
- Epoxy
Required components:Buy all the products listed in the bill of material.
StepsMaking base of the robot- Cut 5mm thick aluminum sheet using jig saw as per the design.
- Weld all side using tig or arc welder and drill holes as per the diagram.
Making wheels
- Cut 5’ 4 PVC pipes as per the diagram.
- Close two ends of the pipe to make wheel and make holes to "attach motor".
- Connect other two wheels to bearing and connect it to treaded rod to make free movement.
- Cut rubber sheet and attach it to the wheels by using rubber adhesive.
Mounting UVC t8 light
- Attach the base servo to base of the robot and cut two 255mm diameter circular pieces and one 250mm circular piece
- connect shaft of the servo to 250mm piece
- make half foot spacer using plastic enclosure and mount uvc tube light.
- Take 5 foot length plastic sheet and cut 1 foot width plastic sheet and stick reflective sheet over the plastic sheet.
- Make protecting lid using plastic sheet and cover it on the top.
Make a uvc strobe light and mount with servo gymbal1 / 4 • this strobe light is used to disinfect at particular place
- To make a gymbal connect two servos at x and y axis accordingly on top of the build aluminum casing for strobe light as per the diagram and stick reflective sheet inside the casing.
- Now solder 6 grid uv-c led inside the middle of the casing.
- And connect it with the servo.
Mounting base light
- Finally, mount the uv-c base light at 45 degree angle.
Internal parts:
Assembled robot image :
CAD design:
Making app in MIT app inventor:
- This android application is used to control the robot via WIFI.
- First we need to enter IP address of the robot the robot will connect to the network
- when we access the user interface the commands are send to the node mcu Bord and then the robot will move.
- Now move the robot at starting possession and start saving next possession
- Record each and every possession of the room layout now all possession are saved in a text file.
- Move the robot at stating point and click play button to play recorded possessions
- when its done the robot and lights are shut off
- The app indicate the light state for safety.
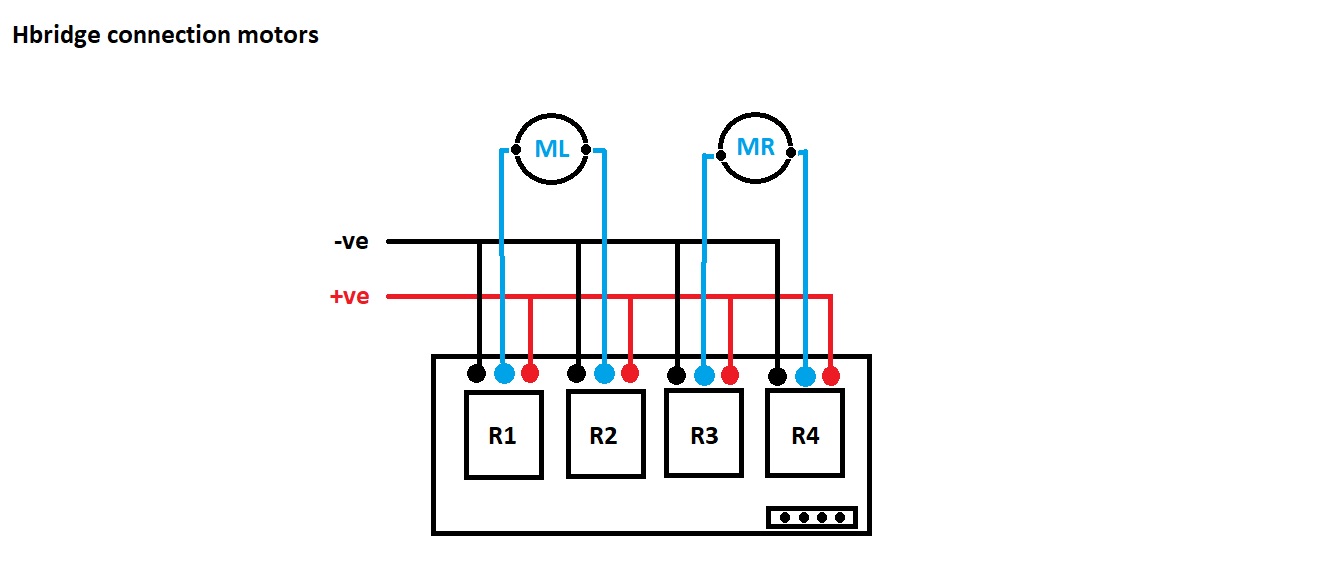
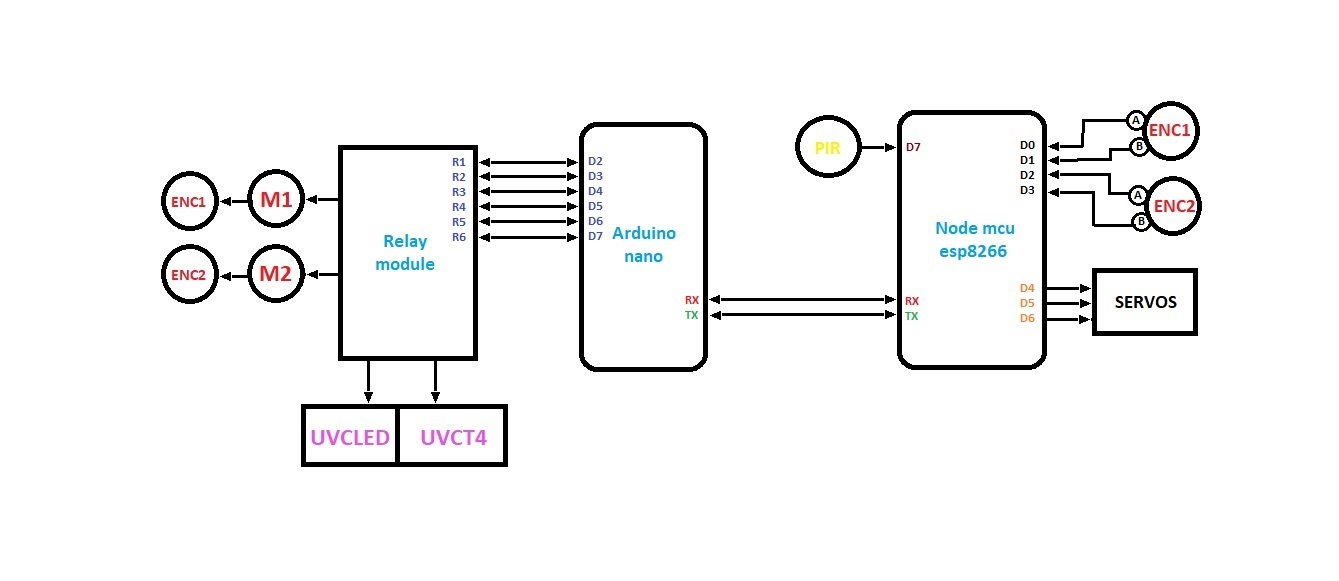
circuit and connections:1 / 3 • connect the circuit using above diagrams
- connect all electronics with the help of schematic diagram
Explanation :Our motivation is to disinfect the entire room without any human involved in the field. So we decide to build a cost effective remote controlled robot named as (UV Hero). This robot can controlled over WIFI about 5 to 6 meters away from the containment zone. And it has special features to disinfect specific area such as door handle, taps and Switches etc. By using UV-C led strobe light it can be focused at any direction and other feature is disinfect objects and wall by rotatable UV-C T8 light and then the base UV-C led used to disinfect floors. In our project the robot can record layout of the room and maneuver later. By using this Method we can disinfect room whenever needed, this make our robot user friendly. For safety purpose motion detector (PIR sensor) is attached near UV-C T8 light if anyone arrives near the robot it will turn off. This robot is cheap and cost effective because it has low custom components to build
program:Open Arduino IDE connect the Arduino nano board select the port and upload the given sketch. When it's done connect node mcu and install required library to the IDE, enter your SSID and Password on the sketch then upload it. Once it uploaded open serial monitor get the IP address and enter it on the android app.
algorithm to save position:
when we press save the starting position will saved and then move the robot for next position and press save when we done saving position they are stored in a text file.
when we press play button the saved position are send to the node mcu
the node mcu read that position and process with above algorithm
Working:Once the node mcu get the value it's compared with current position of the motor and run the motor to achieve that value.
This same algorithm is used to record servos.
calculation for uv-c kill dosage
Pros:- No humans are involved in the field.
- No liquid sanitizers.
- Easy to use.
- Record and play feature enables the robots carefree.
- Can be used in any places.
- Cost effective method to disinfect.
Cons:- Robot works only in indoor.
- It’s not fully automated.
- No obstacles should be found during maneuvering.
Safety:- If robot detects any motion while working it will stop.
- The uvc bulbs are secured by casing.
- The app will indicate whether uvc is on or off.
Download project file





















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments