#include <Servo.h>
// create an instance of the Servo library
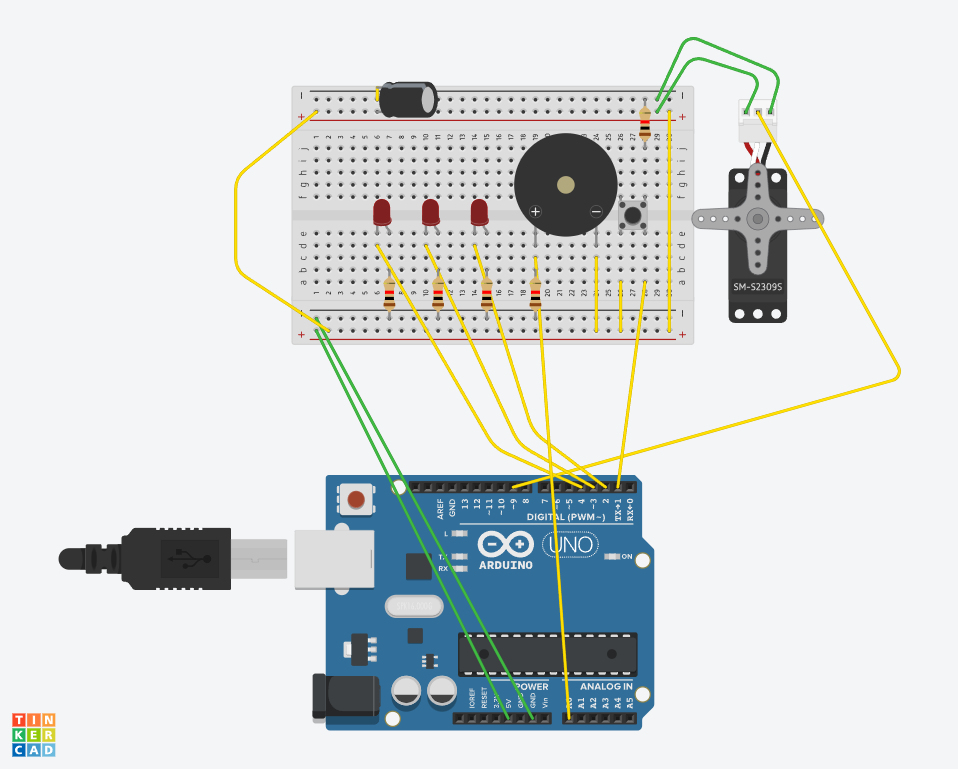
Servo myServo;
const int piezo = A0; // pin the piezo is attached to
const int switchPin = 2; // pin the switch is attached to
const int yellowLed = 3; // pin the yellow LED is attached to
const int greenLed = 4; // pin the green LED is attached to
const int redLed = 5; // pin the red LED is attached to
// variable for the piezo value
int knockVal;
// variable for the switch value
int switchVal;
// variables for the high and low limits of the knock value
const int quietKnock = 10;
const int loudKnock = 100;
// variable to indicate if locked or not
bool locked = false;
// how many valid knocks you've received
int numberOfKnocks = 0;
void setup() {
// attach the servo to pin 9
myServo.attach(9);
// make the LED pins outputs
pinMode(yellowLed, OUTPUT);
pinMode(redLed, OUTPUT);
pinMode(greenLed, OUTPUT);
// set the switch pin as an input
pinMode(switchPin, INPUT);
// start serial communication for debugging
Serial.begin(9600);
// turn the green LED on
digitalWrite(greenLed, HIGH);
// move the servo to the unlocked position
myServo.write(0);
// print status to the Serial Monitor
Serial.println("the box is unlocked!");
}
void loop() {
// if the box is unlocked
if (locked == false) {
// read the value of the switch pin
switchVal = digitalRead(switchPin);
// if the button is pressed, lock the box
if (switchVal == HIGH) {
// set the locked variable to "true"
locked = true;
// change the status LEDs
digitalWrite(greenLed, LOW);
digitalWrite(redLed, HIGH);
// move the servo to the locked position
myServo.write(90);
// print out status
Serial.println("the box is locked!");
// wait for the servo to move into position
delay(1000);
}
}
// if the box is locked
if (locked == true) {
// check the value of the piezo
knockVal = analogRead(piezo);
// if there are not enough valid knocks
if (numberOfKnocks < 3 && knockVal > 0) {
// check to see if the knock is in range
if (checkForKnock(knockVal) == true) {
// increment the number of valid knocks
numberOfKnocks++;
}
// print status of knocks
Serial.print(3 - numberOfKnocks);
Serial.println(" more knocks to go");
}
// if there are three knocks
if (numberOfKnocks >= 3) {
// unlock the box
locked = false;
// move the servo to the unlocked position
myServo.write(0);
// wait for it to move
delay(20);
// change status LEDs
digitalWrite(greenLed, HIGH);
digitalWrite(redLed, LOW);
Serial.println("the box is unlocked!");
numberOfKnocks = 0;
}
}
}
// this function checks to see if a detected knock is within max and min range
bool checkForKnock(int value) {
// if the value of the knock is greater than the minimum, and larger
// than the maximum
if (value > quietKnock && value < loudKnock) {
// turn the status LED on
digitalWrite(yellowLed, HIGH);
delay(50);
digitalWrite(yellowLed, LOW);
// print out the status
Serial.print("Valid knock of value ");
Serial.println(value);
// return true
return true;
}
// if the knock is not within range
else {
// print status
Serial.print("Bad knock value ");
Serial.println(value);
// return false
return false;
}
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
Comments