


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
We launched our original Vorpal the Hexapod open source, 3D-printed robot project almost exactly a year ago and it was a huge success. Over 1, 000 people worldwide have built that project so far, including hundreds built by schools worldwide. (Here's a link to the smaller hexapod project.)
But we wanted to go bigger, and that's why we designed Max the Megapod. Max is head-turning big. Nearly two feet in diameter when standing, three when sitting sprawled out on the floor.
Like its smaller sibling, Max is open source, 3D-printed, Arduino-powered, Bluetooth-controlled, Scratch-enabled, and 100% pure fun.
When we showed Max at the New York Maker Faire a few weeks ago, the crowds loved it! Little kids (and even their parents) were awe-struck whenever Max sprung to life in our display and started busting some serious dance moves. People audibly gasped when it started dancing and scampering at terrifying speed across the table.
Some editors from MAKE: saw the reaction and awarded us a coveted "Editor's Choice Award" at the Faire.
Like all our projects, Max is open source, CC-BY-SA. All 3D models and source models are publicly available for your hacking pleasure. All Arduino and Scratch code is public as well. We use absolutely no proprietary parts. Every piece of electronics is either open source (Arduino Nano, Adafruit Servo Driver) or commonly available (standard size servos, standard connectors, no proprietary boards of any kind). Links to all source files are listed below.
We do provide the convenience of kits (Megapod kit is here) that come with everything you need. We've found that if we provide kits, many more people will build the project, and they'll be much more successful. A lot of people try to source their own parts but end up buying the wrong parts, or are fooled into buying defective parts from unscrupulous suppliers.
If you're thinking of building your own Megapod but have never built a moderately complex robotics project before, we would suggest you first start with the smaller, less expensive, and easier to build original Vorpal the Hexapod (link) model.
Project Origins and AcknowledgementsThanks to Gaige Moore who helped develop the original prototypes for the smaller Vorpal the Hexapod on which Max was based, and for helping build and test Max during development.
Thanks to science fiction author Peter S. Drang for originally suggesting a supersized version of the hexapod.
Scaling Up Is Hard To DoMax is based on the original Vorpal Hexapod, but trust me, it was a lot harder than just printing the parts at 200% size!
Hundreds of changes had to be made to the 3D models to make this work and still be printable on modest sized printers. (Printer only needs a 200mm cube bed, about 8 inches, medium sized by today's standards).
The main changes were:
- Real bearings had to be used on all Servos mounts. The original hexapod only weighs about a pound so we could get away with little plastic nubs, but that won't work on the 9 pound Max--way too much friction. We used commonly available 608 Skate bearings in the spirit of keeping this open source using only commonly available hardware.
- The largest parts were split up and screw mounts were added so this can be printed on modest sized 3D printers. It only requires a 200mm cube bed (about 8") and quite a few people have printers at least that big.
- The entire electrical system had to be changed due to the much higher currents that the larger servos draw.
- All the caddies to hold electronics are totally redesigned, and power distro harness is massive compared to the smaller hexapod project. It takes two full hours to build the power harness for Max, but it only takes 15 minutes to build the one for the smaller Vorpal Hexapod. (In our kits, these parts are pre-soldered for you.)
- It took a long time to find the right servo to drive this project. After trying many different kinds, we settled on the workhorse MG958 from Tower Pro which was a great balance of low cost and high performance.
- Assembly documentation had to be extensively revised including new diagrams and pictures.
- We bought a bunch of different batteries and did extensive battery testing so we could make good recommendations and characterize runtimes for Makers who wanted to build the project.
In all, it was at least 300 hours of work (not including print time for numerous failed attempts), and thousands of dollars in expenses, to create this double sized version.
Software CompatibleInterestingly, one thing that did not change very much was the software. No changes were required to the Scratch interface, and no coding changes to the Arduino code were needed (out of thousands of lines). This allows us to keep a common codebase between the large and small robot.
Fully Compatible with Vorpal the HexapodMax is fully compatible with all the features of the original Vorpal Hexapod, including:
- All dance moves, walking modes, and leg motions work just the same in Max. The motions are just as fast, but since Max is twice the size he has twice the ground speed. For a hexapod, he moves incredibly fast, and we think he's one of the fastest open source walking robots out there.
- Max is fully Scratch programmable, including the ability to create new walking gaits and new leg motions using Scratch and upload them to the gamepad for use during activities. You don't even need to be connected to the computer to use these stored leg motions.
- Max uses the same gamepad (3D-printed) as Vorpal, no need to relearn any commands if you've already built the smaller robot.
Originally we started designing this just as something we'd use to bring crowds to our booth at Maker Faires, teacher conferences, and other public demos. But people kept asking if they could build one themselves, so we did the extra work to make it into an easy to build kit.
Right now, people from all over the world have bought our Max the Megapod kits, and at least two Makers we know of are building the project from self-sourced parts. Soon there will be Megapods running around all over planet Earth, right alongside their little sibling Vorpal Hexapods.
Future Work: The Gigapod?Are we working on an even bigger version for next year's NY Maker Faire? Could there be a Gigapod coming next?
The problems of doubling again to the next size (almost four feet in diameter when standing and weighing an estimated 50 pounds) are even harder to solve, and will cost at least an estimated ten thousand dollars in development expenses to perfect.
Are we crazy enough to try? Will my wife allow me to drop $10k building what amounts to an awesomely huge toy?
Stay tuned!
Links to Open Source Files and More Information- STL Files on Thingiverse
- Arduino Source Code on GitHub
- Megapod Assembly Instructions (includes Bill of Materials)
- Source 3D Models on OnShape.com: (click on the "Megapod" Tab)
- Max the Megapod Maker Kit Information
- Vorpal the Hexapod (smaller version) Maker Kit Information
- Original Vorpal the Hexapod Arduino Project Hub Page (If you've never built a moderately complex robot project before, the smaller version is less expensive and easier to build.)
- VorpalRobotics Main Website (Listing all our projects)
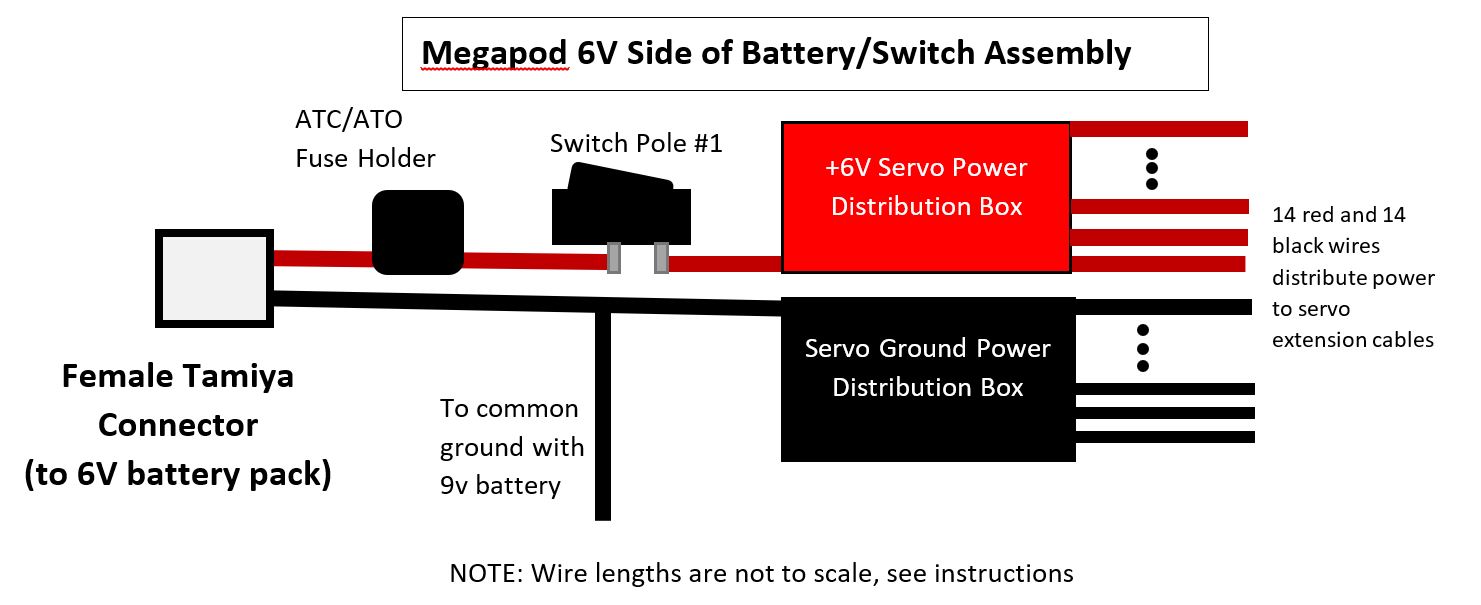
Megapod Power Distribution Harness, 6v Side
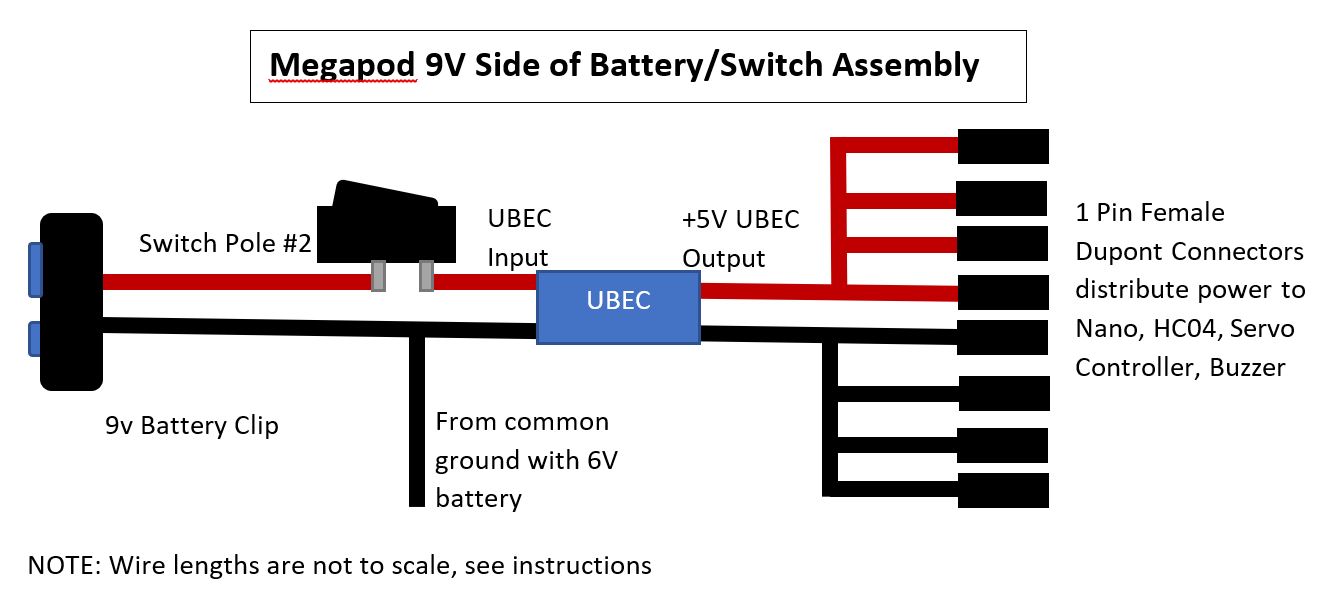
Megapod Power Distribution Harness 9v side
and sends it through a BEC which converts to 5.0 volts to feed all logic components (Nano, Servo Driver, Bluetooth module, etc)




{kind=link}
{kind=link}
{kind=link}
Comments