A method for calibrating an on-body 9 Degree of Freedom (DOF) Inertial Measurement Unit (IMU) is proposed. The proposed system uses a single 3D position sensor, the earth’s ambient gravity vector, the earth’s magnetic field vector, and a semi-random motion sequence for calibration. The proposed method performs sequential calibration of each of the sensors and transports magnetic field vector values on unity3d to move object 3d (Earth)
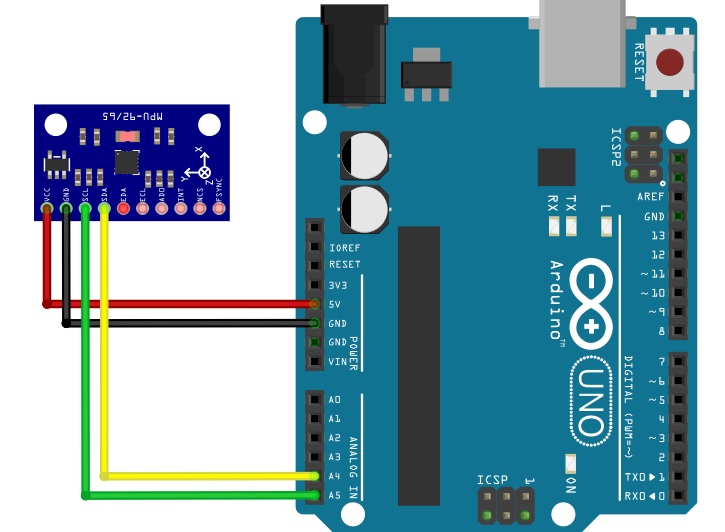
MPU9250 & MPU9265 calibration 9-DOF Gyro Accelerator Magnetometer Module with Arduino on Unity 3d
Download unity package (code)
https://shorturl.edafait.com/?mpu9250_9265_mpu6050_earth.unitypackage



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments