


This is a modular Xadow system, can be used as a wearable to track GPS position and steps or ideally used during a photography session to add global context to the individual photographs. Most recent Nikon cameras have the ability to directly geo-tag images using streaming data from the serial port. Nikon branded hotshoe GPS's cost around $500. Third-party modules cost around $300. This Xadow based solution can be implemented with a lot of bells and whistles for around $200.
We take lots of oblique images from a helicopter for our high-resolution 3D modelling service - Aero3Dpro. While photogrammetry and aerotriangulation lets us establish the position and orientation of these photographs afterwards from a relatively poor initial GPS and no IMU, just after capture there is no indication how well an area is covered from different angles. This can be a pretty difficult proposition anyway, especially in the presence of narrow allies and tall buildings. However with a good initial GPS-IMU one could build a low resolution model of the city literally on the fly.
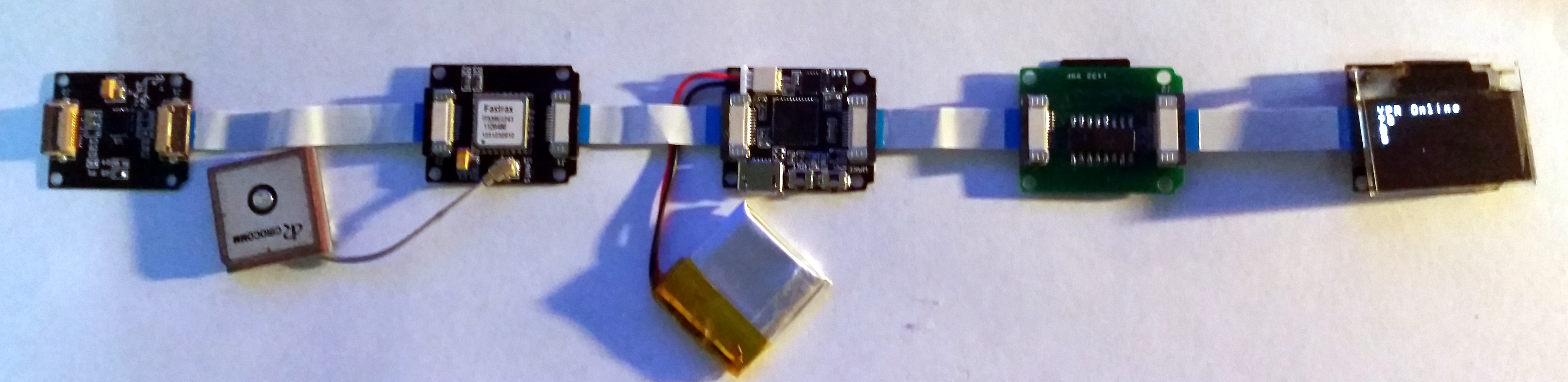
So I set about building a system that fills this niche, a camera hotshoe mounted system with a reasonably accurate GPS and IMU. There are already a lot of existing Xadow modules which satisfy the requirements of the system. I just had to cook up a few more as described in a previous post to cater for the unique requirements for interfacing with the camera and logging the data.
- Xadow Barometer
- Xadow 9-DoF IMU (can be combined with 1 above in the new 10-DoF IMU)
- Xadow GPS (the NMEA from the stock one does not agree with the Nikon so looking at a UBlox based version)
- Xadow OLED
- Xadow-M0 with MBed support
- SPI to Dual-UART with SC16IS752, this is necessary because the only available UART on the Xadow-M0 is consumed by the GPS. We need 2 more UART's to send data to BLE module and camera at 4800 Baud.
- Xadow BLE Module
- Xadow SD for logging locally in case BLE connection is patchy or a non-Nikon camera is being used which does not allow geotagging over UART.
A lot can be done when all these modules come together to party, the mBed code is available here. The android app for receiving the GPS-IMU data over BLE and predicting the camera foot print is still in the works. If anyone wants to take the app development up as an exercise I can provide the source. In conclusion I must thank Kris Winer for excellent IMU test beds and sample codes which helped me get started down this path.
After all the electronics came the enclosure and hotshoe attachment system. I designed something rough in blender using a trace of the stacked PCB's and got it locally 3D printed by 3D Hubs and Andrew Karas. This mounts nicely on the hotshoe, but the openings for reset, USB and cable to camera are not neat, a more aligned box is in the works.



{kind=link}
Comments