I designed this machine to assist with my high school physics assignment.
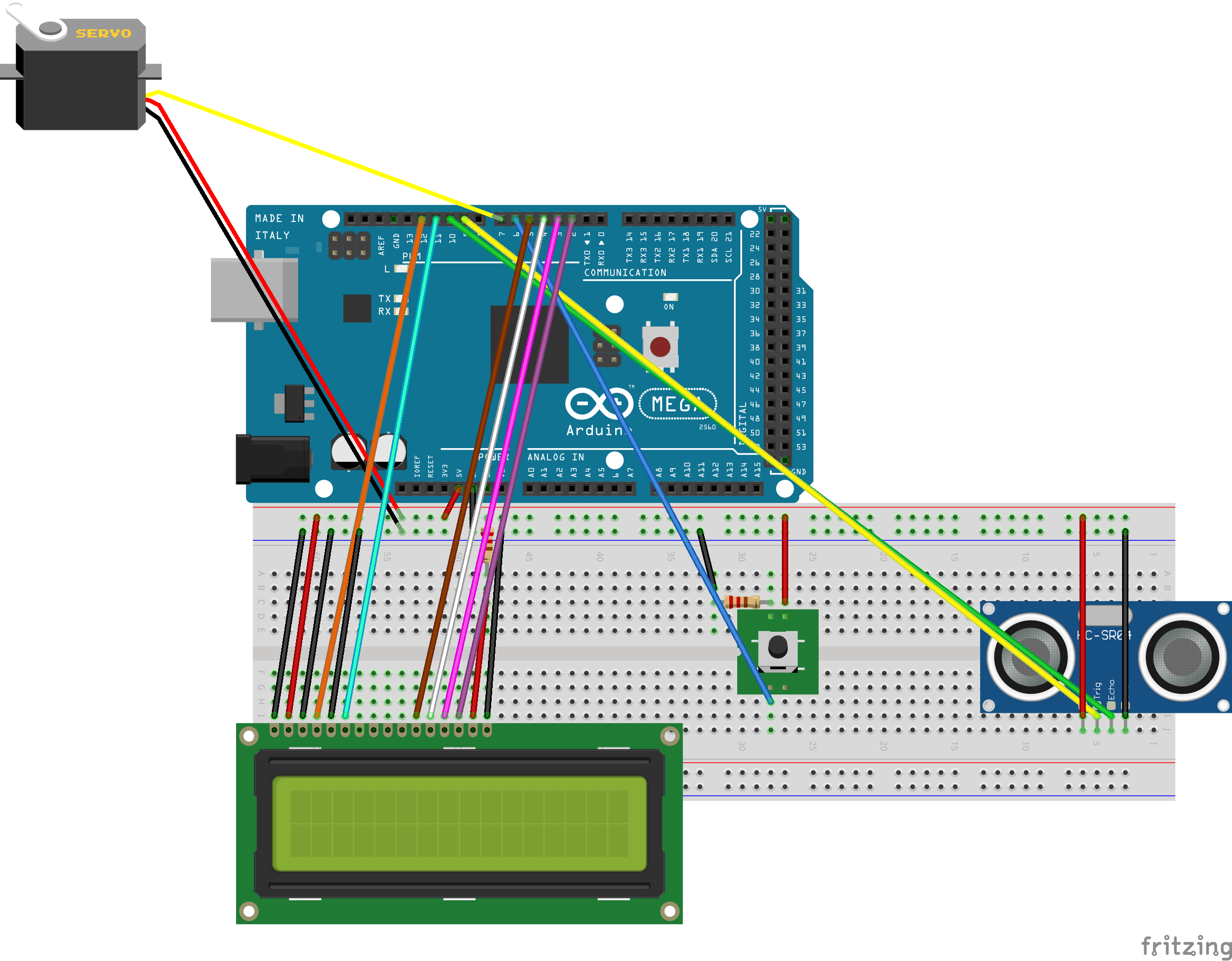
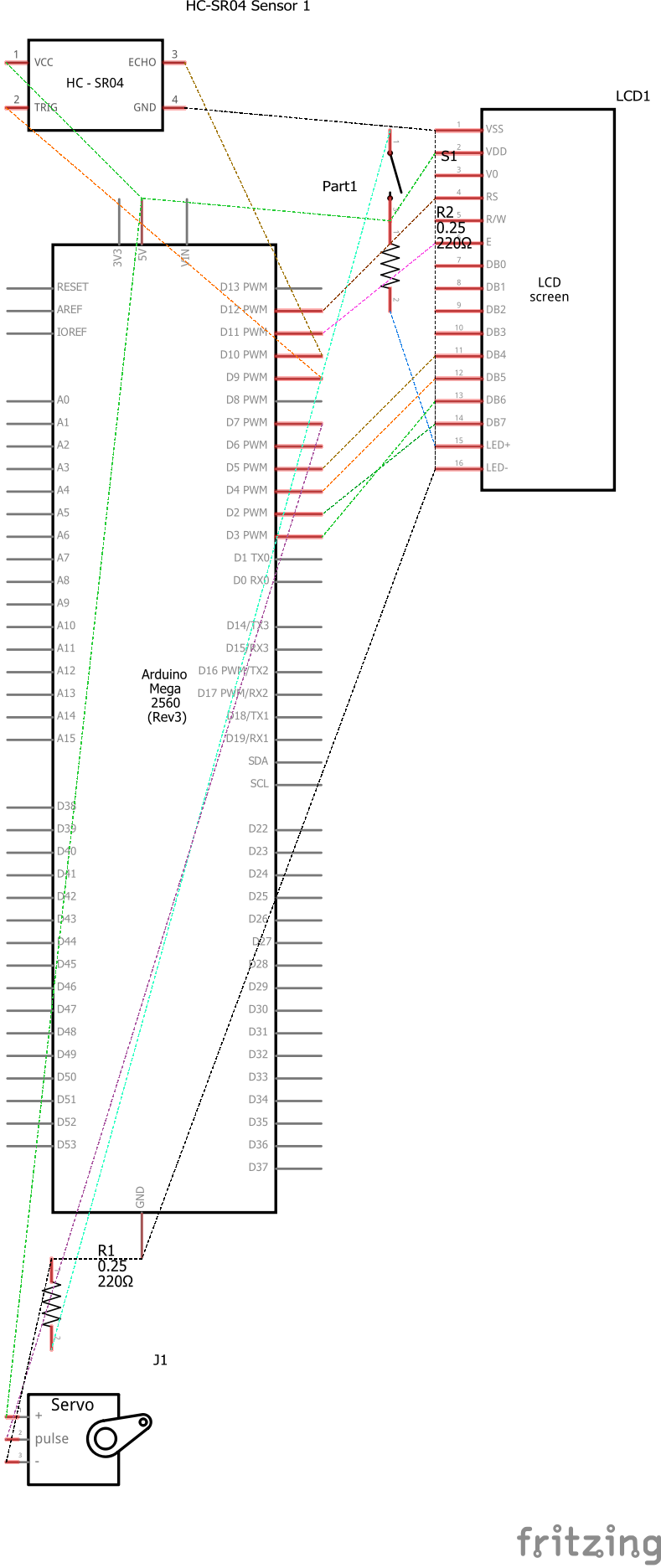
When you press the button, a servo opens and a stopwatch starts. Once the distance sensor sees an object within a certain range of it, the stopwatch ends and the LCD displays the amount of time it took for the distance sensor to see the object after the button was pressed.
I am next going to build a ramp that can be covered in different materials (such as sandpaper and tin foil) which I'm going to roll an object down. I am going to use a servo as a gate to release the object and the sensor is going to tell me how quickly the object reached the bottom. This allows me to work out which material had the most friction.



_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.