



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Ever thought to control Arduino by a smart watch. Yes it's possible. We need a smart watch which has Bluetooth and that will connect to HC-05 Bluetooth module.
Smartwatch Software This is the most challenging part for me. As my watch is base on Wear OS. I need a app to send data to Arduino. Believe me I have no java or android SDK experience. For this project I learnt java and Android SDK. I took me about a month to complete this app. I already uploaded app in Playstore.
https://play.google.com/store/apps/details?id=com.rahuldpro.hc_05joystick&hl=en
You can download it from here. Remember there are many kind of smartwatch available in market. All smartwatch may not work. My app only available for Wear OS.
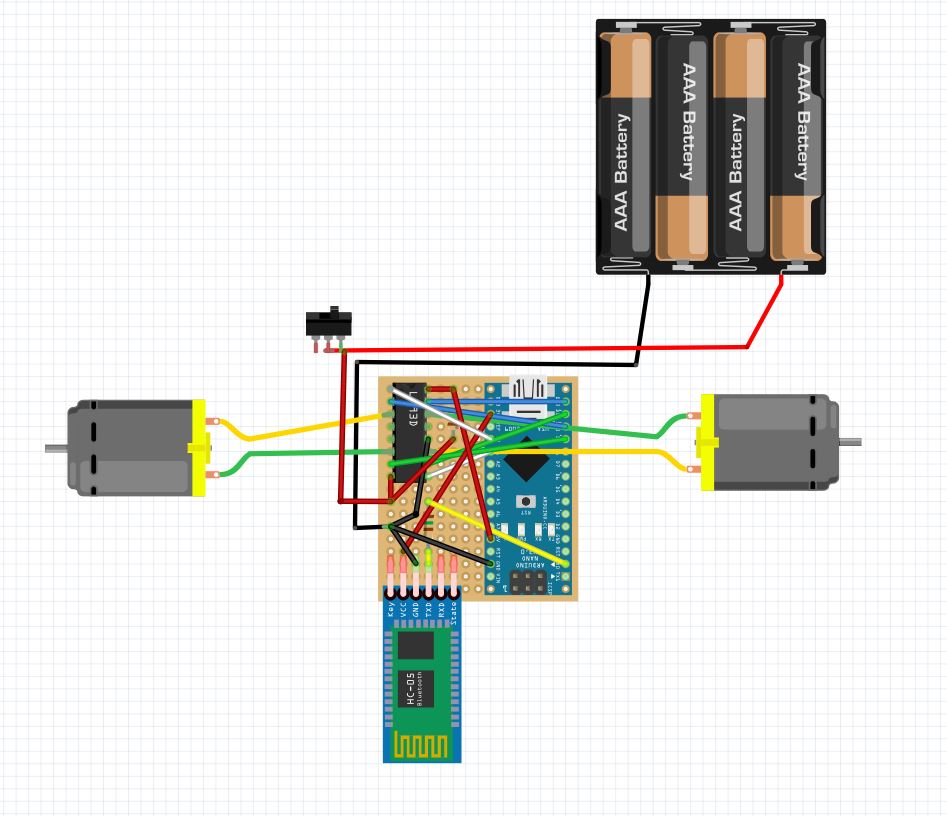
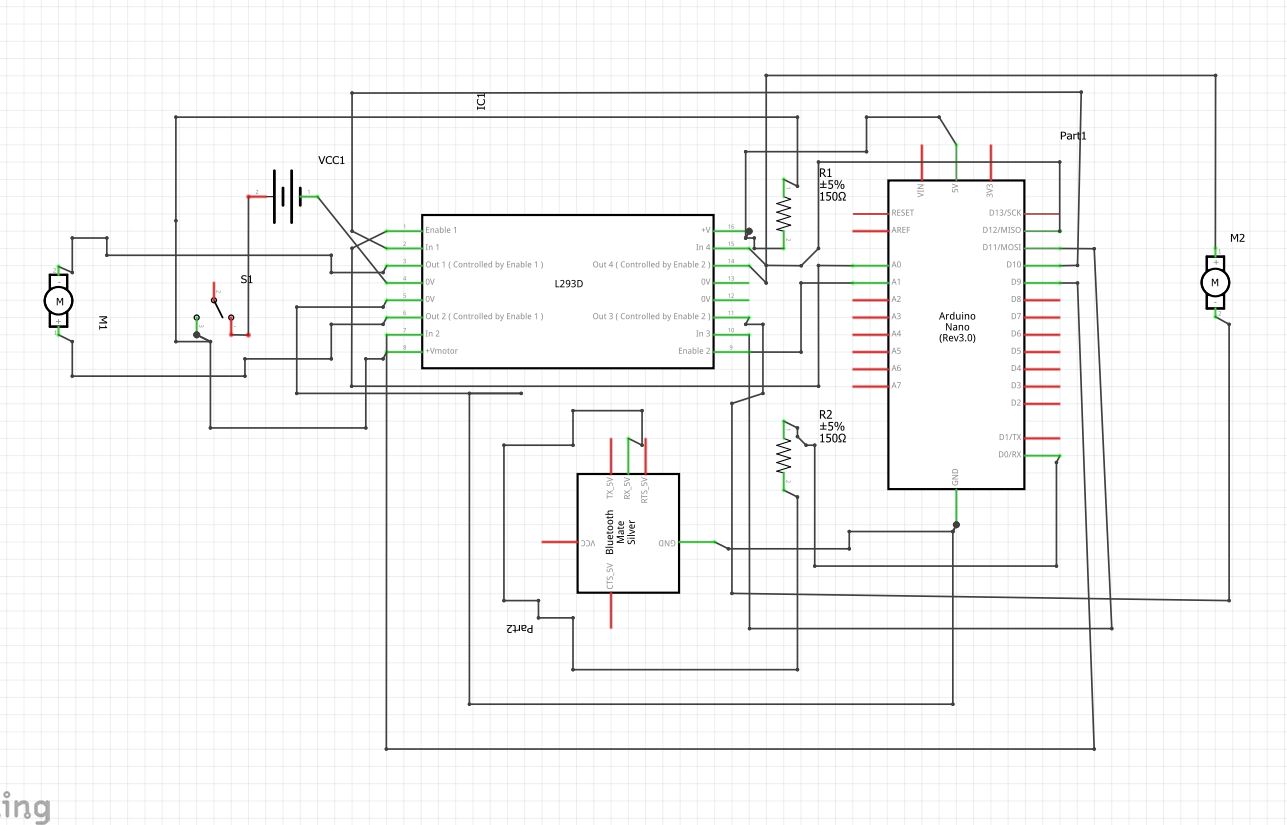
Planning I have mention all equipment we needs. Either you can make your own DIY car but in this project I used toy car, which is cheap and you will get rechargeable battery also. We are using L293D motor driver, perfect for our project. we are using L293D PWM speed controller pin for speed controller. Just follow the schematic. In the smartwatch more you drag forward more you will get speed.
Here is full making of video.
Just follow the schematic and upload the code in Arduino. Paired HC-05 with your smartwatch first. Open the app, HC-05 will be listed there. Select it and you will get joystick controller. Now drag it, remember more you drag more you will get speed as we are using L293D speed controller also.

{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.