



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Idiopathic Scoliosis
The term scoliosis was introduced by Hippocrates in which `` scoliosis '' means curved and then Galen defined it as an abnormal curvature of the spine. Kleinberg in 1922 spoke about idiopathic scoliosis used in patients who present this deformity, but this one is of unknown origin, that is, without a specific cause. Today idiopathic scoliosis (EI) is defined as a three-dimensional deformity of the spine that includes lateral deviation of more than 10 ° in the frontal plane, rotation in the transverse plane and inversion of lordosis in the sagittal plane, That is, there is a reduction or disappearance of physiological dorsal kyphosis and lumbar lordosis. The etiology of (EI) is not yet known although there are several theories making it a pathology of multifactorial origin.
My sister's anecdote of life
She was diagnosed with idiopathic scoliosis in 2016, his therapies were performed every day in the hospital an hour from our home and then resumed his studies in the afternoon, this required an economic expense for transportation and for the implementation of a product Therapeutic which is a pillow for the area of the coccyx, at the end of their therapies should be done at home so that unorthodox methods were used which made them difficult because we could not get exactly the right temperature and causing the cloth quickly Used for this zone will cool or be at a high temperature will cause a minor degree burn. This project was based on the therapeutic benefit through heat therapy in people suffering from idiopathic scoliosis to develop a better way individual therapies in the home and prevent the progression of this deformity, allowing the person suffering from this disease Get more comfort when doing your therapies allowing you to save time and money.
Therapeutic body treatment
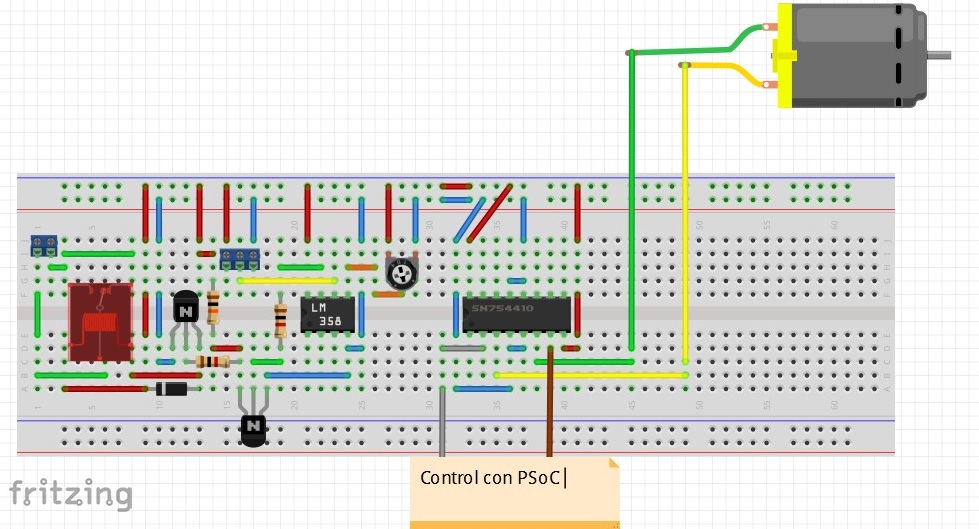
Based on the above described use of the Analog Coprocessor card, to control the access to a blanket at a predefined temperature in order to be able to develop a therapeutic treatment by thermal transfer for this we will use the Lm35 a voltage comparator an inverter and A relay to generate a feedback system to be able to reach the temperature in the blanket evenly, the motion sensor will enable the use of said blanket by means of a motor, in addition the light intensity in the environment will allow to activate a source of Light in this case a green led in low light conditions.
Later we will configure in the Psoc Creator the parameters of the blocks in the image it can be observed that basically the sample codes of the PIR and ALS sensors were added in order to work them simultaneously. The gain in the motion sensor was increased to make sure That the sensor detects with a higher sensitivity.
In the code you can see in more detail how these two sensors were connected and the parameters for their operation in the following image the corresponding pin assignment is observed.
In the video you can see how to detect the movement the card allows to open the cube to be able to have the towel for the therapy in addition the light sensor is configured to turn on the LED in low and medium light conditions and turn it off if it has A high percentage of light in the environment, it is to clarify that the system is self-regulated and the control for access to the towel is made by means of a bridge H.
Results
The PSoC Analog Coprocessor is a great tool and in fact has a great scope, in this project it showed a part of what it can get to do and it is tried to improve the system making a total use of the capacity of the card.
{kind=link}

Comments
Please log in or sign up to comment.