In fittness club my friend asked me to design digital timer for to measure user excercises. After a while i could not find big 7 segment display so i decided to do this project in my way; "Old Fashion, New Tech!"
I tried various types of servos, DC motors with encoders but my friends old laser printer saved me from long wires. Finally i fixed motor problem with stepper motor and easy driver.
Plastic parts produced with Arduino GRBL CNC machine. Black base part recovered from lab type gas torch.
Wood parts are not polished. After doing some changes, i will polish that or may be i can make some shades with gas torch.
Arduino is connected with sockets. I use this Arduino in different projects. (Arduino is not cheap in my country (Turkey))
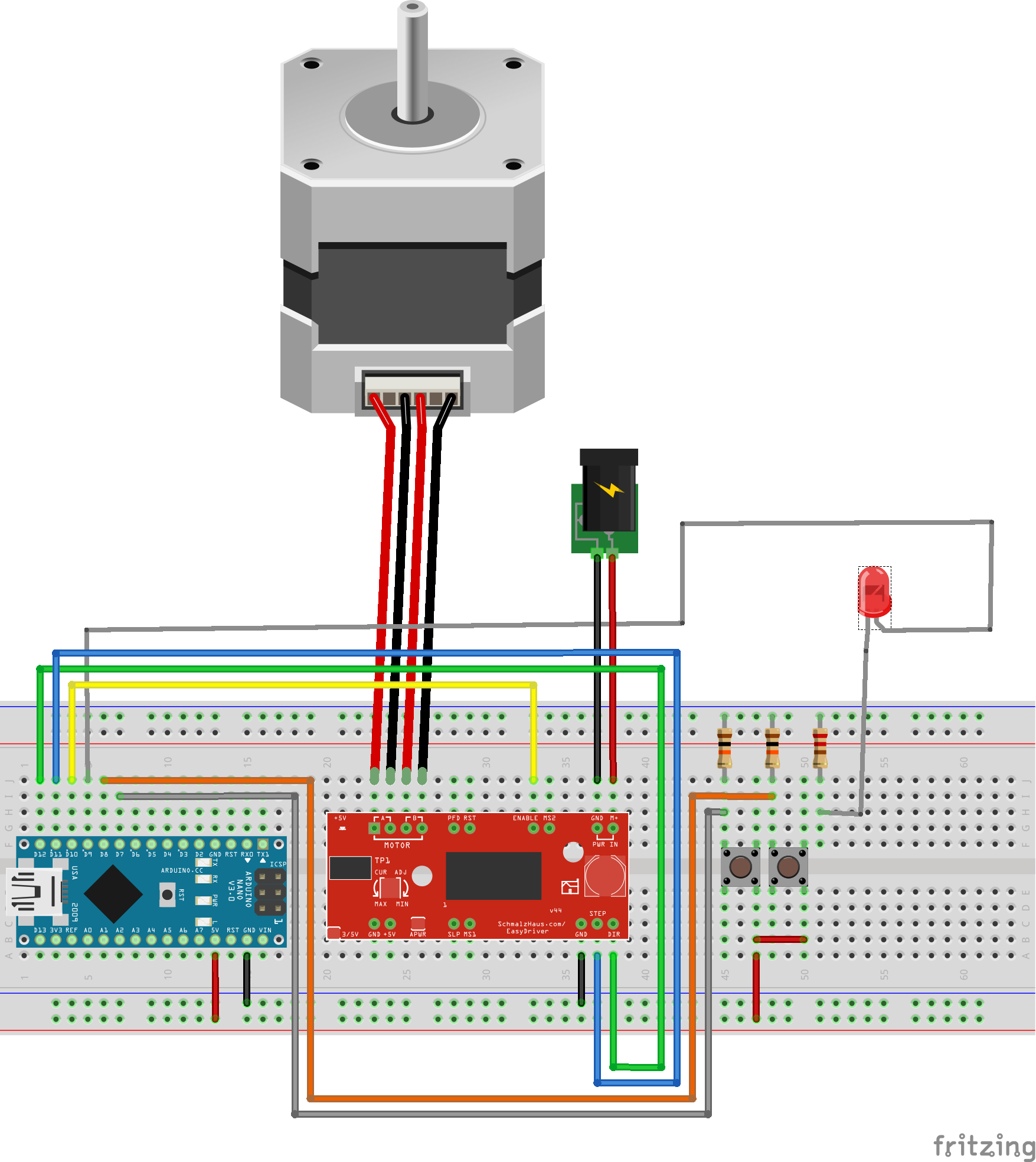
Easy driver, pull-down resistors and tactile buttons are soldered on pcb. L7812cv attached for led strip. Thin sticks are holding box a little bit for light beam.

















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments