


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hi guys!
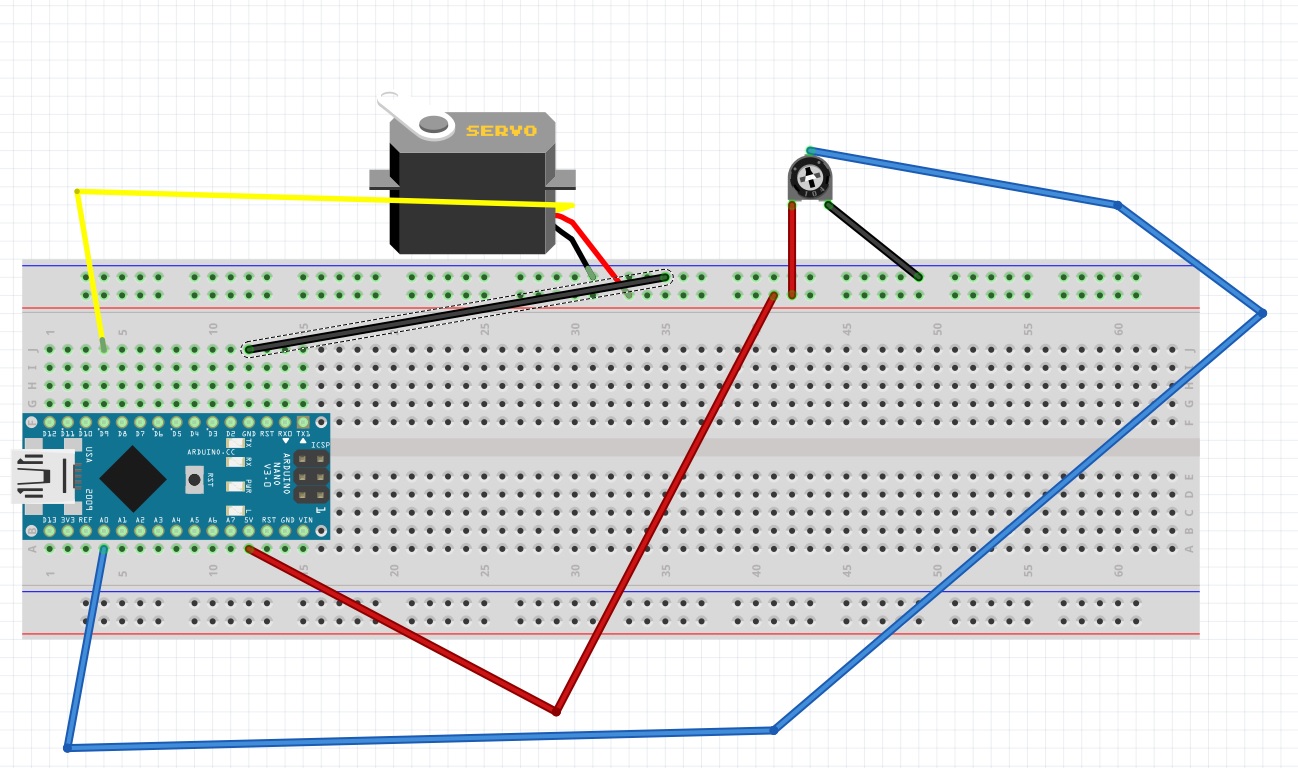
Read moreAsalwaysIhavecreatedasimpleandafunprojectbyjustusingarduinonano(oranytype!), servo, 10Kpotentiometer, wiresandbreadboardofanytype.
I am controlling servo(my camera is stupid🤓🤓)
Add the following snippet to your HTML:
Hi guys! As always, I have created a simple and a fun project by using servo and potentiometer.
Hardware components | ||||||
|
| × | 1 | |||
|
| × | 1 | |||
|
| × | 1 | |||
|
| × | 1 | |||
|
| × | 1 | |||
AsalwaysIhavecreatedasimpleandafunprojectbyjustusingarduinonano(oranytype!), servo, 10Kpotentiometer, wiresandbreadboardofanytype.

{kind=link}
Comments
Please log in or sign up to comment.