


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
The project is about a RoboArm that you can control it by your hand gestures and movement simulation.
The video:
Why:
I decided to make this project because it has many applications in real life such as medical operations and manufacturing.
The concept:
1Sheeld get the orientation sensor readings from your mobile and send them to Arduino board and in your code map the readings to the angles of servo motor and write these angles.
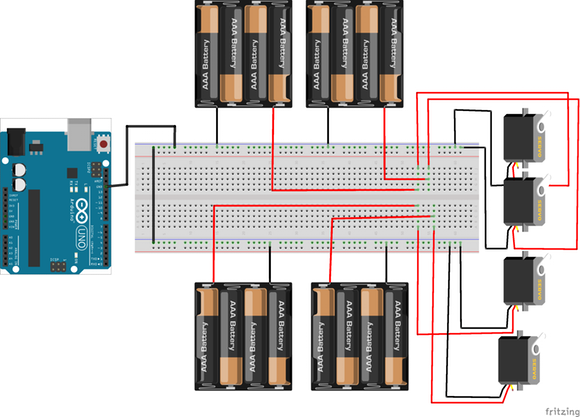
Connections:
Connect the servo motors to the Arduino.
Connect the signal ( yellow wires ) to your Arduino PWM pins(ex 3, 5, 6, 9, 10, 11).
NOTE :we use the power supply instead of batteries but the batteries works well ONLY check they are 5V.
After checking the connections write your code and and check that 1Sheeld on the uploading mode.
Then upload your code from upload button on arduino IDE.
HINT: Types of sensor changes by the type of your mobile SO may be my code doesn't work well with your project SO you Should check the readings of your own sensor.
Then put 1Sheeld on operating mode.
Scan your 1Sheeld through your App.
choose the orientation sensor, proximity sensor and check your readings.
During my work I got confused about the servo connections so be aware of it.
Servo connections:
OR
Check breadboard connections to be sure that every thing is OK.
Also you can use combinations of many sensors to get more accurate results.
Here you can find the Build Guide for the Arm and the manual
from its website :
https://www.mearm.com/pages/instructions




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.