/*ARDUINO BLUETOOTH RC CAR:
SIGIoT TKMCE
Author: Abhinand A S
Date: 8/11/2018
*/
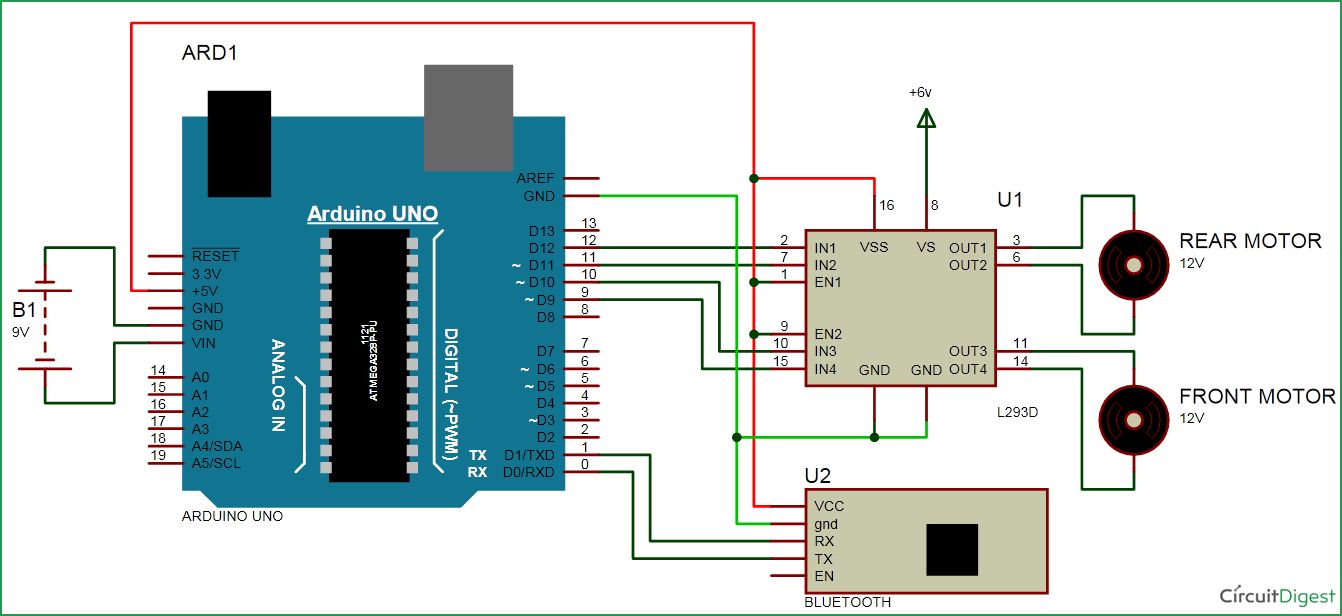
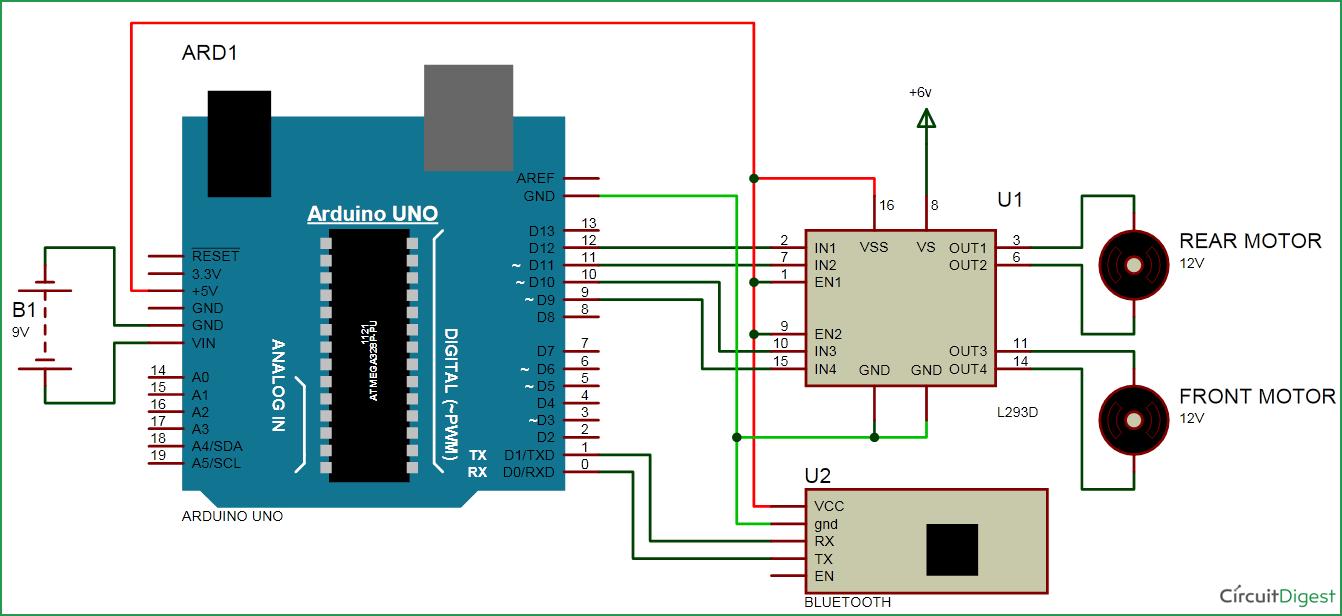
int motorRightA = 5; //Right Motor-clockwise
int motorRightB = 6; //Right Motor-anticlockwise
int motorLeftA = 11; //Left Motor-clockwise
int motorLeftB = 12; //Left Motor-clockwise
char bt = 0; //BT
/*-----------------------------------------------------------------------------------------------------*/
void setup()
{
Serial.begin(9600);
pinMode(motorRightA,OUTPUT);
pinMode(motorRightB,OUTPUT);
pinMode(motorRightB,OUTPUT);
pinMode(motorLeftB,OUTPUT);
}
void loop()
{
if (Serial.available() > 0)
{
bt = Serial.read();
digitalWrite(led, 1);
/*_________________________________________________________________________________________________*/
if(bt == 'F') //move forwards
{
digitalWrite(motorRightA, HIGH);
digitalWrite(motorRightB, LOW);
digitalWrite(motorLeftA, HIGH);
digitalWrite(motorLeftB, LOW);
}
else if (bt == 'B') //move backwards
{
digitalWrite(motorRightA, LOW);
digitalWrite(motorRightB, HIGH);
digitalWrite(motorLeftA, LOW);
digitalWrite(motorLeftB, HIGH);
}
else if (bt == 'S') //stop!!
{
digitalWrite(motorRightA, LOW);
digitalWrite(motorRightB, LOW);
digitalWrite(motorLeftA, LOW);
digitalWrite(motorLeftB, LOW);
}
else if (bt == 'R') //right
{
digitalWrite(motorRightA, HIGH);
digitalWrite(motorRightB, LOW);
digitalWrite(motorLeftA, LOW);
digitalWrite(motorLeftB, LOW);
}
else if (bt == 'L') //left
{
digitalWrite(motorRightA, LOW);
digitalWrite(motorRightB, LOW);
digitalWrite(motorLeftA, HIGH);
digitalWrite(motorLeftB, LOW);
}
else if (bt == 'I') //forward right
{
digitalWrite(motorRightA, HIGH);
digitalWrite(motorRightB, LOW);
digitalWrite(motorLeftA, LOW);
digitalWrite(motorLeftB, HIGH);
}
else if (bt == 'G') //forward left
{
digitalWrite(motorRightA, LOW);
digitalWrite(motorRightB, HIGH);
digitalWrite(motorLeftA, HIGH);
digitalWrite(motorLeftB, LOW);
}
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}
Comments