



To launch a bridge between ArduCopter and MAVROS, create a new file mavlink_bridge.launch:
<launch>
<!-- vim: set ft=xml noet : -->
<!-- mavlink bridge (ros/mavlink - udp/mavlink) launch script for ArduCopter based FCU's sitl -->
<arg name="ns" default="iris" />
<arg name="mavlink_bridge_url" default="udp://127.0.0.1:14553@127.0.0.1:14560" />
<group ns="$(arg ns)">
<node pkg="mavros" type="gcs_bridge" name="mavlink_bridge">
<param name="gcs_url" value="$(arg mavlink_bridge_url)" />
</node>
</group>
</launch>
Then run the node and open APM Planner.
roslaunch mavlink_bridge.launch
The Gazebo plugins that enable the simulation allow to use GPS modes like GUIDED, LOITER or AUTO.
Learn how to fly in the different modes:
CIRCLE
Erle-Copter will orbit a point of interest with the nose of the vehicle pointed towards the center.
GUIDED
Guided is a capability of Copter to dynamically guide the copter to a target location wirelessly using a telemetry radio module and ground station application.
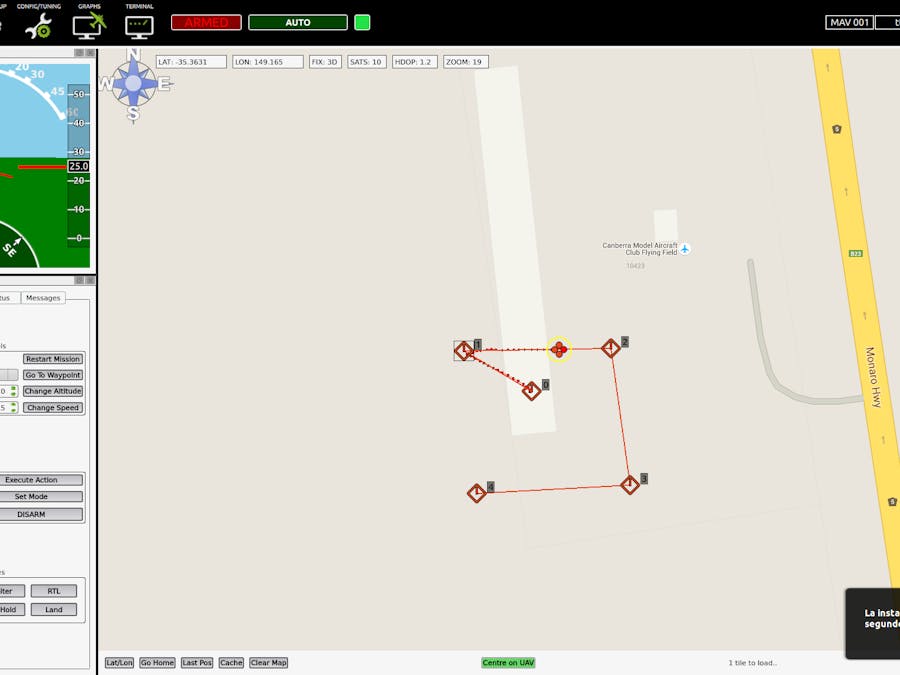
AUTO
Erle-Copter will follow a pre-programmed mission script stored in the autopilot which is made up of navigation commands (i.e. waypoints) and “do” commands (i.e. commands that do not affect the location of the copter including triggering a camera shutter).




Comments
Please log in or sign up to comment.