This project uses the Particle IO board over WiFi to create an independent parking sensor that can be easily retrofitted into any vehicle that did not come with them from the factory. The Particle board will communicate with ultrasonic sensors placed on the vehicle. These sensors will relay back to the IO the distance to nearest object, and then alert the driver. LED lights and variably changing beeps will let the driver know how far he/she is from the object behind them when parking.
Particle 1 will relieve the data from the ultrasonic sensors and trigger the LED lights in order green, yellow, red, based on the calculated distance using the ultrasonic sensor data. This information will be sent to the second Particle board and once the vehicle has reached the pre-determined closest distance threshold, Particle 2 will trigger two more flashing red LED's and a beeping buzzer.
The Particle boards will be located in the trunk next to the battery of the vehicle. The battery powers the device. The LEDs will be run with long wires to the rear deck of the vehicle.
For the purposes of this project, the apparatus is setup differently. We also recorded a video showing the board directly next to the sensor to show simultaneous functionality.
YouTube Video Link: https://www.youtube.com/watch?v=nsZ85GDSEcU&feature=youtu.be
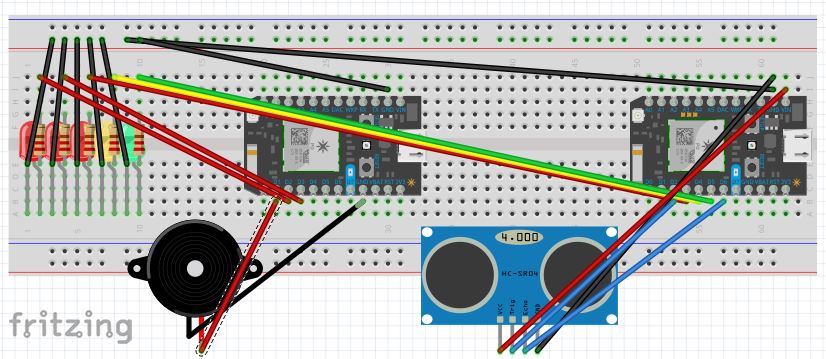
The following pictures show the apparatus setup and voltage regulator dropping voltage from 12V car battery supply to 3.3V that the Photon runs on.
Voltage Drop
Full Setup
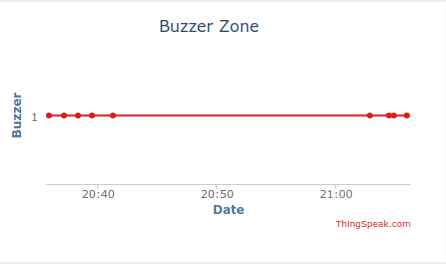
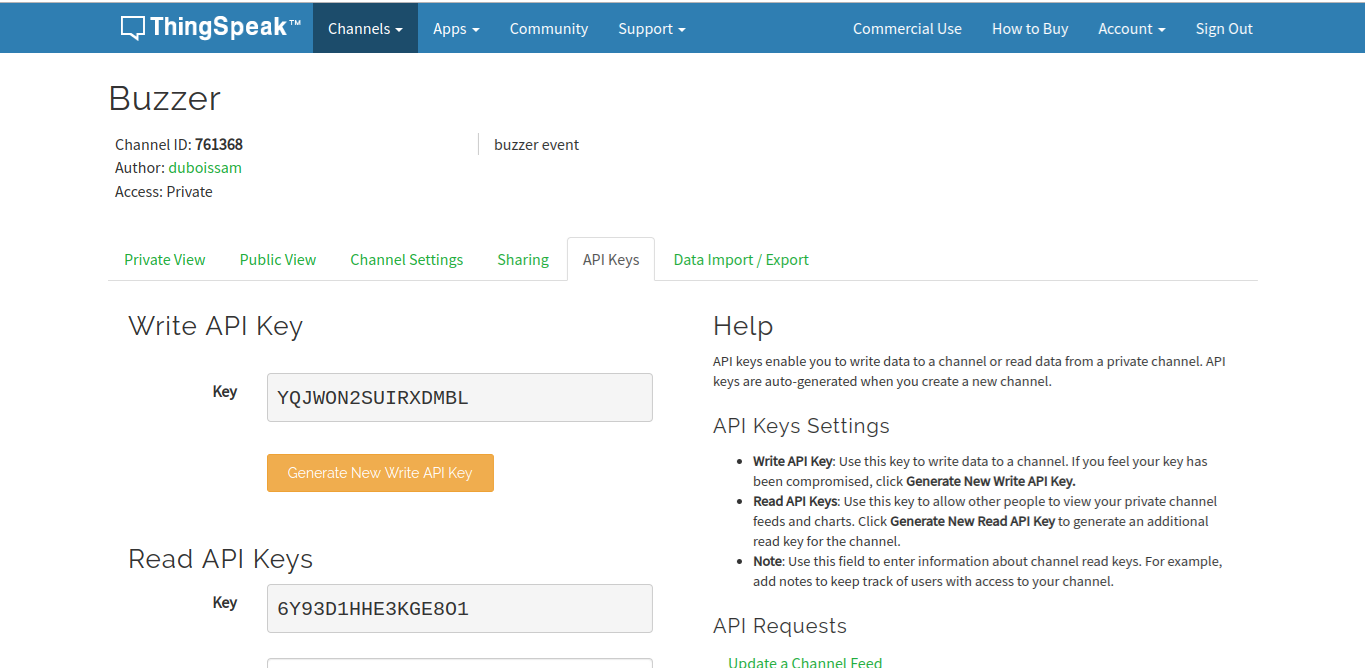
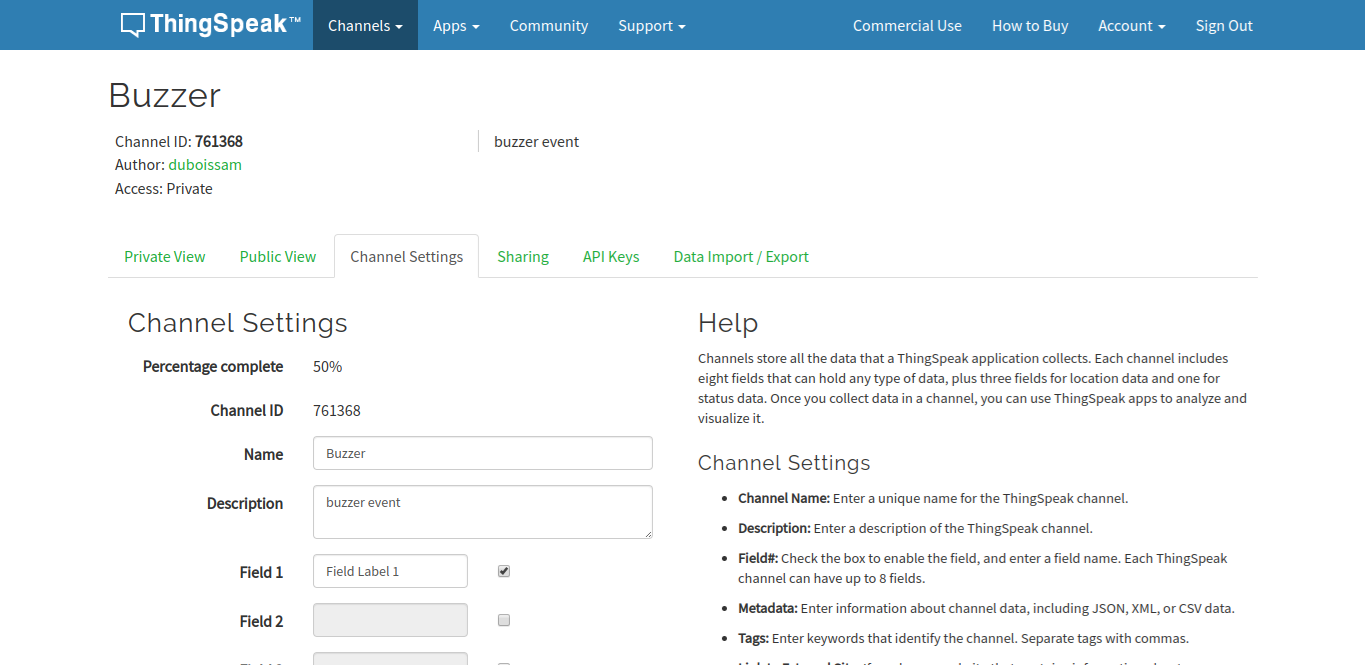
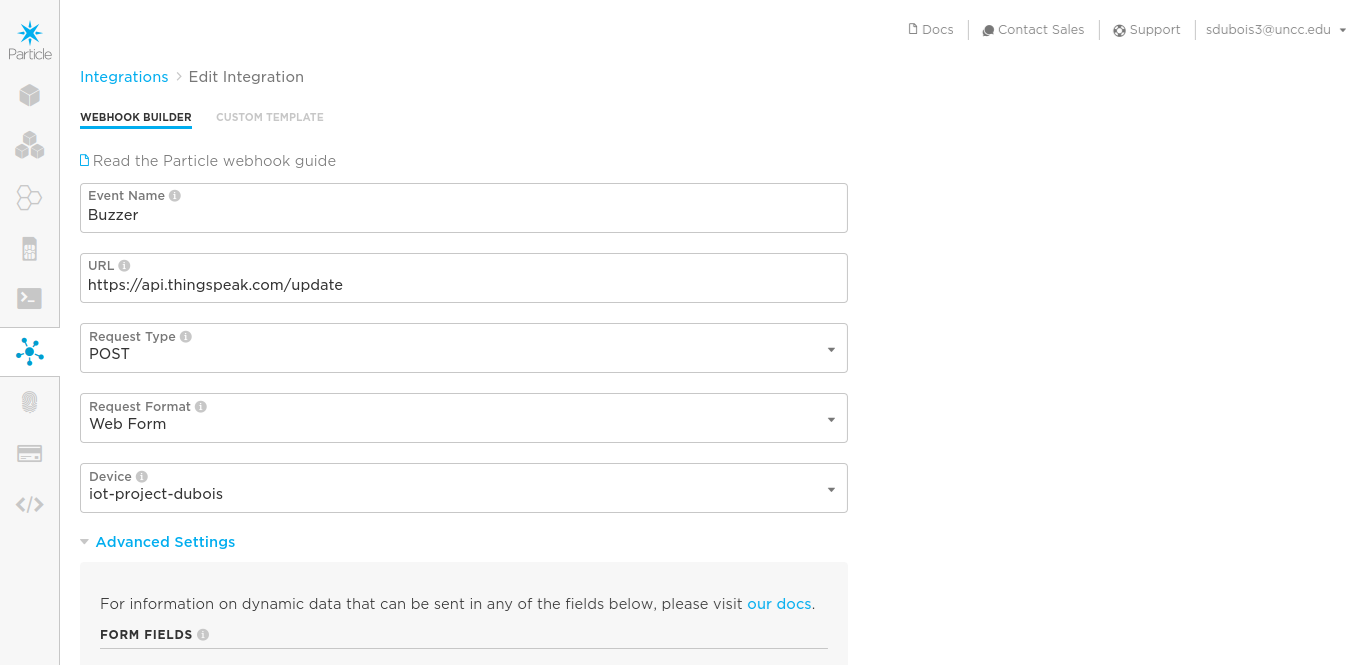
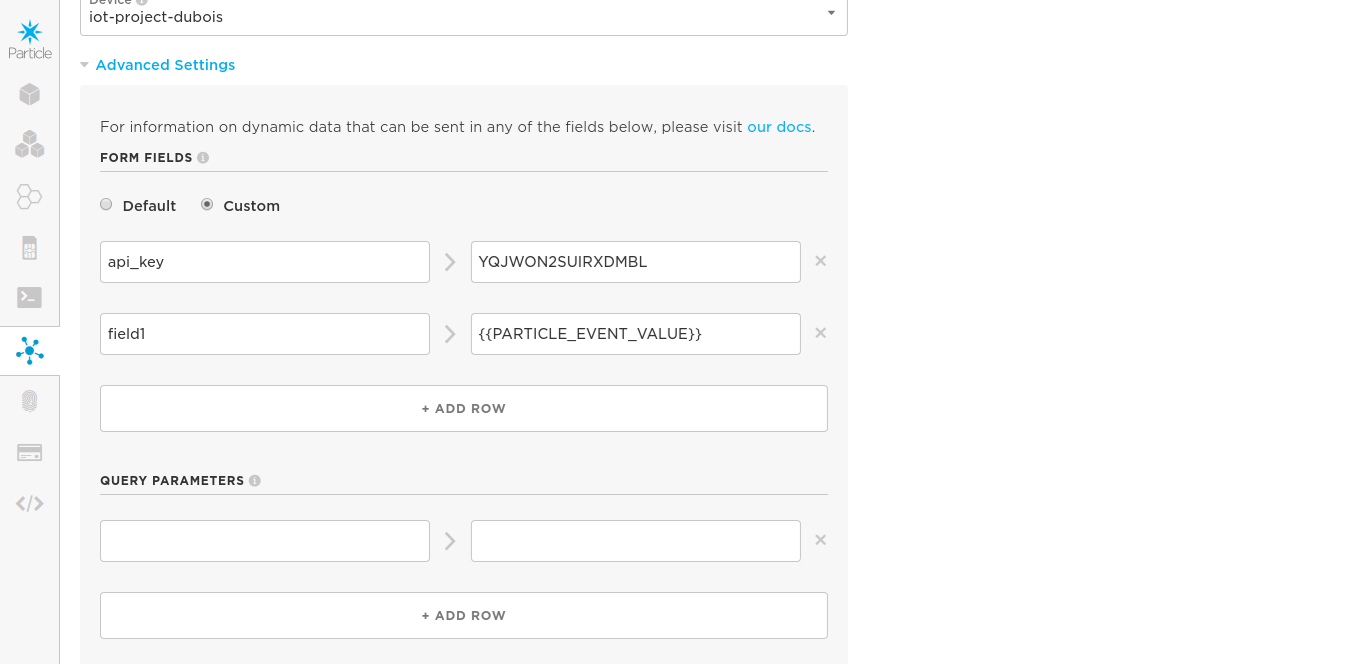
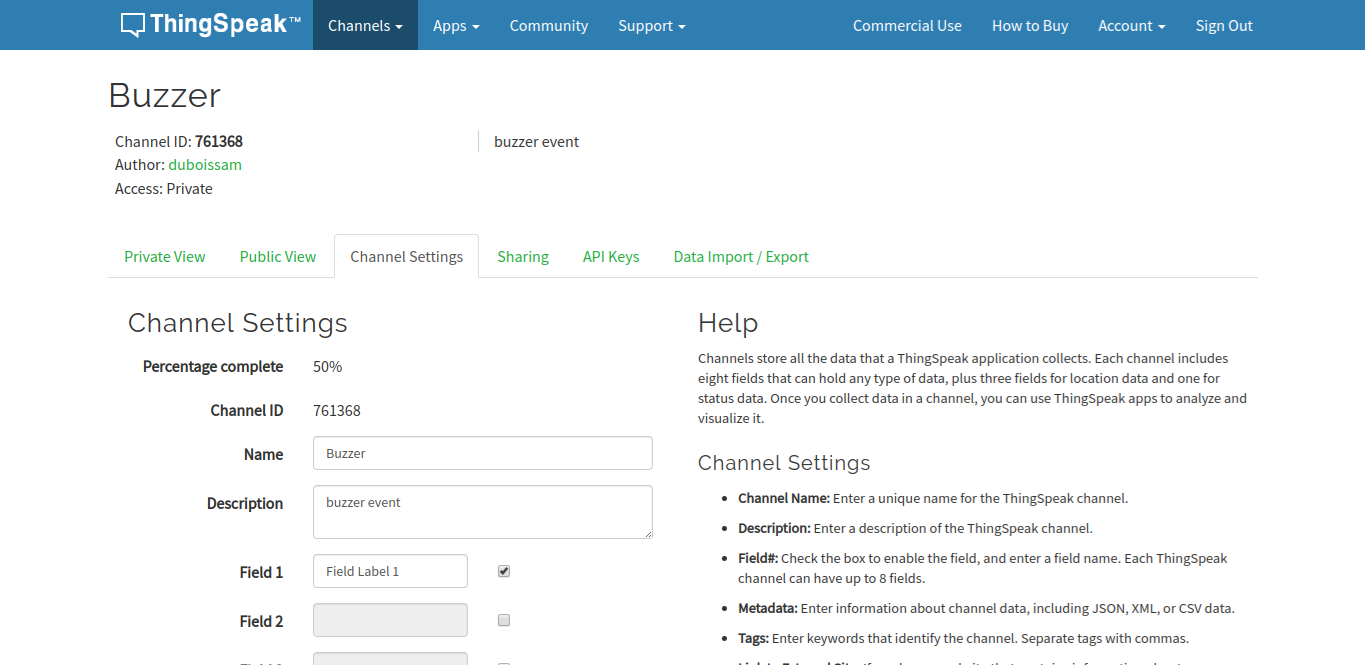
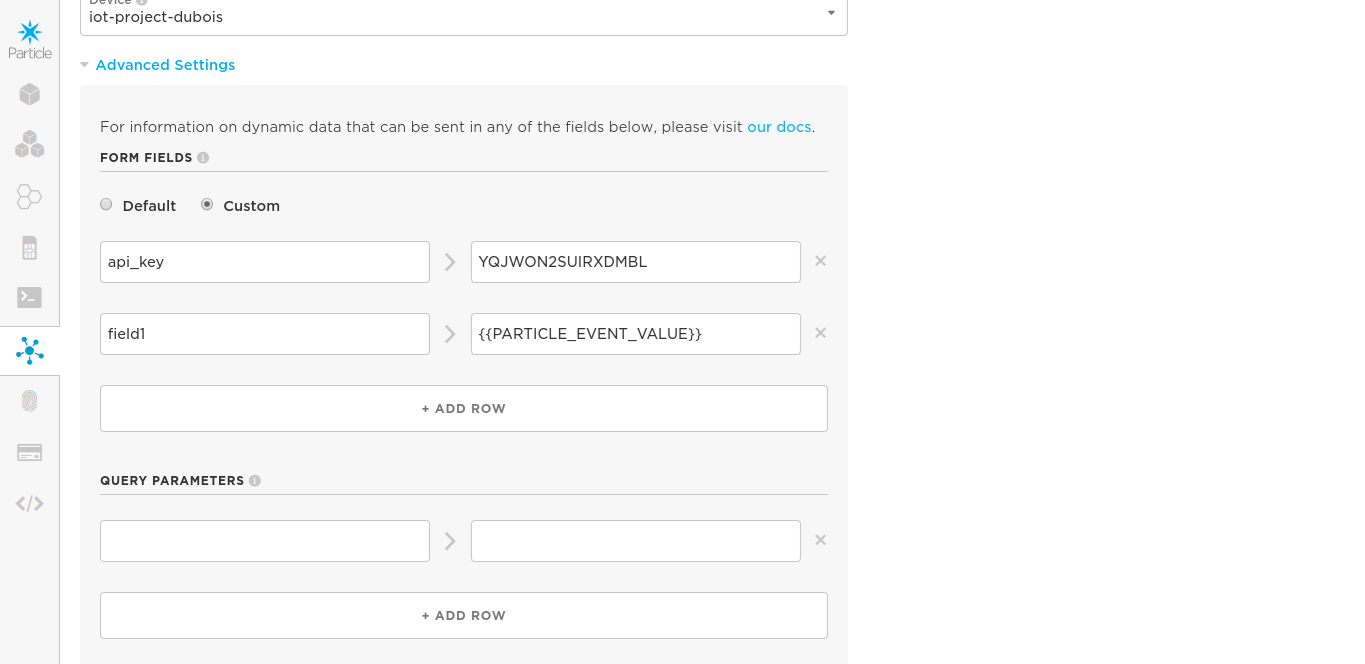
To get a live graph of the number of times the vehicle is within the closest distance threshold we used ThingSpeak. In order to use ThingSpeak we setup a Webhook in the Particle console, as shown in the images below, that is signaled by an event published by photon 1, and in response sends a signal to ThingSpeak. The settings for the ThingSpeak channel that receives the information and puts it into a live graph is shown in the images below as well.
/* * Project parkingsensor * Description:Measures distance and controls LED lights * Author:Caleb Thayer & Sam Dubois * Date: 04/01/19 *///initiate variablesunsignedlongduration,inch,setdistance,setdistanceinch,diff;inttrigPin=2;intredPin=3;intyellowPin=4;intgreenPin=5;intechoPin=6;voidsetup(){//sets pinspinMode(redPin,OUTPUT);pinMode(yellowPin,OUTPUT);pinMode(greenPin,OUTPUT);pinMode(trigPin,OUTPUT);pinMode(echoPin,INPUT);pinMode(D7,OUTPUT);Serial.begin(9600);}voidloop(){//gets data from unltrasonic sensordelay(15);digitalWrite(trigPin,LOW);delayMicroseconds(4);digitalWrite(trigPin,HIGH);delayMicroseconds(15);digitalWrite(trigPin,LOW);duration=pulseIn(echoPin,HIGH);//converts sensor data from duration into inchesinch=(duration/2)/74;//compares distance (inch) to set ranges to control leds and trigger second photon if(inch<=1000){if(inch>42){//flashes green leddigitalWrite(greenPin,HIGH);delay(200);digitalWrite(greenPin,LOW);}elseif(inch>18&&inch<=42){//flashes yellow leddigitalWrite(yellowPin,HIGH);delay(200);digitalWrite(yellowPin,LOW);}elseif(inch>6&&inch<=18){//flashes red leddigitalWrite(redPin,HIGH);delay(200);digitalWrite(redPin,LOW);}elseif(inch<=6){//publishes event to trigger second photonParticle.publish("buzzer_controller","1");//publishes event to send data to thingspeakParticle.publish("Buzzer","ON",PRIVATE);//flashes red leddigitalWrite(redPin,HIGH);delay(1000);digitalWrite(redPin,LOW);}}else{delay(800);}}
Photon 2 code
C/C++
//Photon 2 recieves signal that car has reached red LED zone//triggers 2 red LEDs to flash and buzzer to soundvoidsetup(){pinMode(D1,OUTPUT);pinMode(D2,OUTPUT);pinMode(D3,OUTPUT);digitalWrite(D1,LOW);Particle.subscribe("buzzer_controller",buzz,"550040001051373331333230");delay(1000);//subscribe to photon 2}voidbuzz(constchar*event,constchar*data)//if the event buzz occurs buzzer_controller gets published{digitalWrite(D1,HIGH);digitalWrite(D2,HIGH);digitalWrite(D3,HIGH);delay(500);//Time ondigitalWrite(D1,LOW);digitalWrite(D2,LOW);digitalWrite(D3,LOW);delay(500);//time off}voidloop(){}





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.