
_Bso6G5fOXd.gif?auto=format%2Ccompress&gifq=35&w=400&h=300&fit=min)


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 4 | ||||
| × | 4 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
so I've been working on this Drone project recently with my LAD @Electropunkz
its made out of a generic drone kit that is available online from various sources.BLDC motors are 1400kv orange ones that are also very commonly available, so are these ESCs.
- Arduino Nano R3 x2
- NRF24L01 Module x2
- Generic Drone kit with 4 BLDC MOTORs and ESCs x1
- Custom PCB (Provided by JLCPCB)
Custom PCBs were Provided by JLCPCB, do check them out for low costing PCBs for your project. jlcpcb.com
- ELectronics components - LEDs, buttons, header pins etc. (Provided by UTSOURCE.net )
Thanks utsource.net for Providing parts used in this project, you can check them out if you want to buy good quality stuff for cheap!
BODY ASSEMBLYso like I said earlier, this is the generic drone kit body so if yours is in a different color, the assembly process will be the same.
I first added the BLDC motor with ESCs to each of the drone body arms.
after making 4 of these I assembled them all together with the given power distribution PCB and its supporting PCB. (watch the video for the assembly process!)
At last, we just need to connect the VCC and GND of all the ESCs on the power distribution board so we can later add a battery on it to power the ESCs.
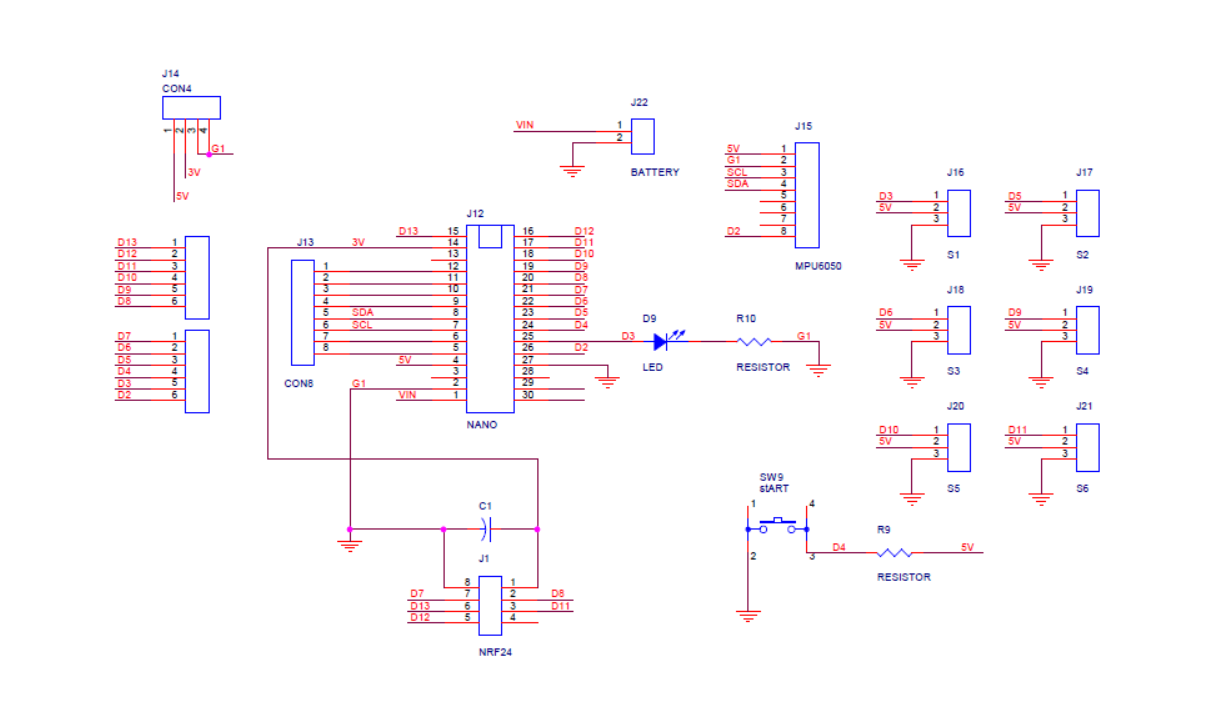
I've made these two Circuits, Transmitter and the receiver which are based around the NRF24l01 module connected with an Arduino nano and other Crucial stuff.. the crucial stiff includes joystick, buttons, servo headers, etc
The goal here was to make a cheap transmitter and receiver setup which can be made and programmed using an Arduino board so we don't need to buy high costing flight controllers and its remote control system.
oh, by the way, I used JLCPCB's service for these PCBs, they provide good stuff every time.
do check them out...
https://www.hackster.io/Oniichan_is_ded/arduino-based-nrf24-transmitter-receiver-setup-d73279
if you want to check out my previous post about these circuits, you can watch its video or its post to get its PCB files, code, Schematic, or the assembly instructions.
HOOKUPFirst, I added the receivers circuit to the drone body and hooked up the ESCs with the following pinout...
after that, I just uploaded its assigned code,
I did the same with the transmitter circuit and that about it...
TESTINGIn order to power this setup correctly, we just need to power both of the modules at the same time. one solution is to power them individually and then press the reset button on both of these PCBs at the same time...
this will reset the modules at the same time and our drone's Transmitter and Receiver will get paired.
now we can just operate the motors wirelessly with the transmitter circuit via NRF24...
Test video-
For now, the drone motors are working fine but they lack precision, you can clearly see that when I press the joystick, all 4 motors don't start at once, there is a delay in them, this delay is the reason why I'm not straight-up flying this drone.
maybe this is just a software thing or a hardware problem.
Let's just say this is Phase 1 of my Drone making Spree and there will be more phases, like in Phase 2 I will fix this problem and try to improve the drone.
and maybe IT WILL FLY











{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.