



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
When you start out on your engineering journey, you often feel that the materials you learn in college are insufficient. But that is not necessarily true. While the stuff we learn might not make us the new Google, it does provide us with a foundation to build our empire.
We have frequently studied dc motors, operating systems, sensors, different modules, etc. One hurdle in the life of an engineer is to convert theoretical knowledge into practical one. There is no other way to do so except to get down and get your hands dirty.
The objective of this work is as follows:
1) Develop a product that eases the workload on manpower and keeps everyone safe.
2)An application that allows us to communicate with the robot in a remote fashion.
3)To study the recommendation techniques and identify their limitations that may help to suggest a hybrid approach that may overcome the drawbacks of existing methods.
4)To identify evaluation metrics used for performance analysis of different recommendation systems. We intend to include a list of features to help frontline workers perform their duties in an effective and remote fashion. We would like to provide state-of-the-art facilities to the clients without compromising on efficiency.
In this blog, we have created a basic surveillance bot using 6 dc motors and a picam. This project will help us understand the working of basic components and how they can be incorporated into a project that can later be developed into something bigger.
What is Flask?It is a micro web framework that has been written in Python.
- database layer and form extraction are absent.
- Flask depends on the Jinja template.
- It allows you to develop web applications in an easy manner and provides you with a wide range of tools and libraries.
- It is beginner-friendly and does not have a boiler plat code.
REST- Representational State Transfer.
- This is an architectural software style that uses a subset of HTTP.
- The API can be used to building and integrating software applications.
- It interacts with a computer system to retrieve a piece of particular information or even perform a function.
- They are lightweight and fast which makes them perfect for IoT-based projects and applications.
GET /POST /accountsPOST /accounts/loginGET /accounts/logoutGET, PUT, DELETE /accounts/<str : username>GET, POST /accounts/<str : username>/tasksGET, PUT, DELETE /accounts/<str : username>/tasks/<int : id>
I. Web RTC:
We will be using WebRTC and WebSocket while working on the video call feature. We aim to improve the functionality and user experience, therefore, we have attached a microphone and an external speaker to the model. WebRTC is an HTML5 specification and is used to integrate media that is in real-time along with a browser.
The advantage of using WebRTC is that one does not need any plugin for the browser. However, to establish a session, you would need a signalling protocol. Moreover, WebSocket is a good choice when we do not need to stream media.
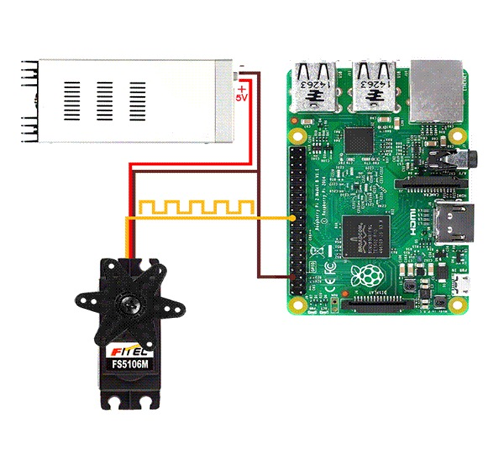
II. Servo Motor
The Picam is mounted on the servo motor which can be controlled through the web page. This function provides a peripheral view to the bot which makes the navigation process much easier. A Servo Motor is a simple device that consists of a DC Motor, Gears and a FeedBack based Position Control System. The main advantage of a Servo Motor is its ability to hold the angular position of its shaft. We use the theory of Pulse Width Modulation or PWM to control the servo motor. Picamera is connected to a CSI port which is made for a camera.
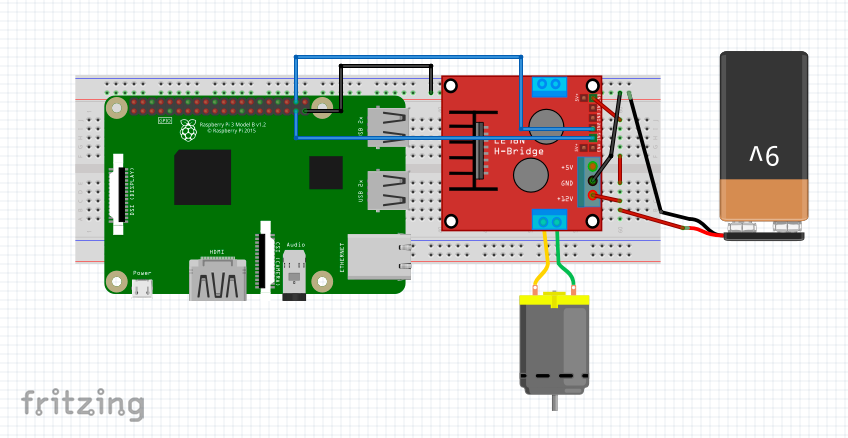
III. DC Motor
We have connected 6 dc motors to 1 motor Driver and are giving it a 12v input. the wheels on the left side of the body are connected serially and the same goes for the wheels on the left side of the body. Therefore, we get two wires from the left and 2 wires from the right side of the body which are then connected to the H bridge driver. A 12 volt supply is provided to the driver which is also connected to the RPI 3b. The wheels move according to the signal received by the RPI through the web application.
Understand the movement of the robot bodyThe metal chassis comes along with 6 dc motors and wheels. The entire left side is connected serially and so is the right side. Therefore, we get two wires from each side.
The bot is programmed to move in 4 directions:
a) Forward - to move the bot in the forward direction, all the 6 wheels (left and right) are given input HIGH.
b) Backward - to move the bot in the backward direction, all the 6 wheels (left and right) are given input HIGH.
c) Left - To move the body left, the left wheels are LOW while the right wheels are given input HIGH. This makes the body turn in the left direction.
d) Right - To move the body right, the right wheels are LOW while the left wheels are given input HIGH. This makes the body turn in the right direction.
IV. Double H-Bridge L298N
The driver module is a high power motor driver that can be used along with DC and Stepper Motors. It can control the direction and speed of the motors.
The Picam is mounted on the servo motor which can be controlled through the web page. This function provides a peripheral view to the bot which makes the navigation process much easier.
APPLICATION
1. Consult with doctors and the medical staff over a video call.
2. Navigate the robot through a terrain/ environment where physical presence isn’t possible.
3. Audio broadcast messages
4. Peripheral view of the camera
CONCLUSION
The paper presents a model to battle and reduce the effects of the virus. The motive of the project is to aid the front-line workers and ensure that patient care remains in excellent condition. In the midst of this pandemic, the most important safety measures are social distancing along with proper sanitization. However, due to the lack of existing technological methods for monitoring these safety measures, human intervention became necessary.






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.