A challenge faced by many hospitals especially during the current times is being understaffed and unable to constantly monitor every patient at once. So we set out to develop a system that can alert hospital staff that a patient in a wheelchair could be having issues by monitoring the actions of a wheelchair using three sensors and three argons. In its current state, the system is limited to measuring the angle the wheelchair has in relation to the ground, the speed the wheelchair is traveling, and if it is getting too close to an object. These very simple readings still would be a big help as the hospital staff could relax the staff needed for anyone in a smart wheelchair to an as-needed basis and send help only when the chair itself relays to them that the patient needs help.
Wiring Diagram
The Sensor Setup
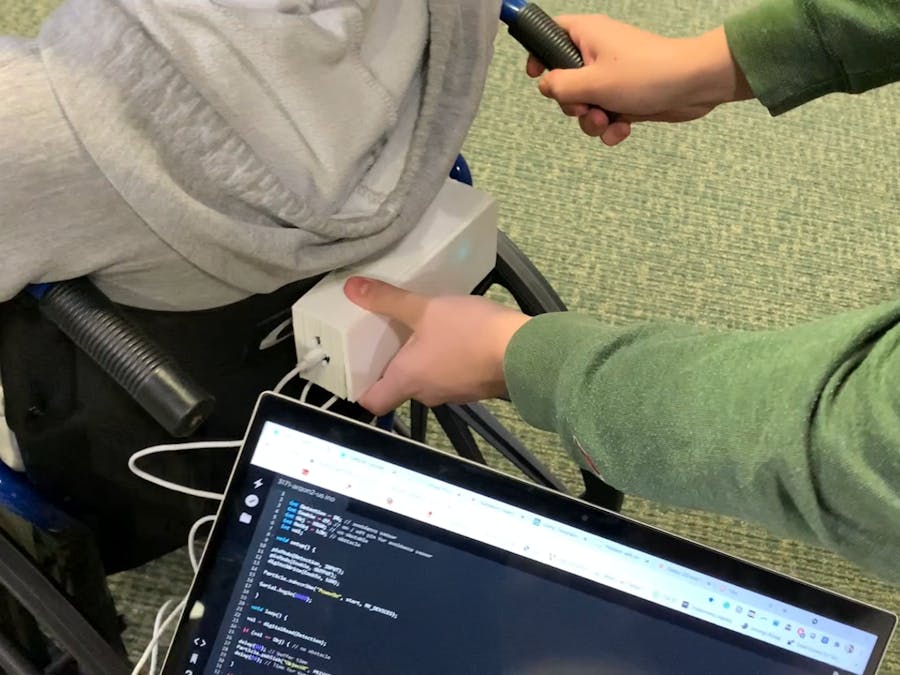
As a group of 3 team members, this wheelchair required 3 argon and 3 sensors. Since this wheelchair was being designed to monitor the status of the wheelchair itself biometric sensors were not needed as the patient was not measured in this project. Instead, an accelerometer was used to measure wheelchair speed, a tilt sensor was used to measure the angle of the wheelchair, and a proximity sensor was used to alert if the wheelchair was about to collide with an object. All 3 sensors and argons were tucked into a box that in actual practice would be fasted to the rear of the wheelchair just below the handlebars but for this demonstration were held by the rider of the wheelchair. This box is shown in the following figure, as it would look attached to the back of the wheelchair.
Rough Attachment of Sensor Box to Wheelchair
3D Printed Box w/ Argon Setup
Live Data
An important feature of this project was the circuit being set up to live graph the data on its own. Leading up to test day the code appeared to be working and ready to rollout data once the circuit was activated. This would have been represented by an LED but on test day the light only flashed once and the sensors never produced live data. Since this was the only day that filming for the video could take place the live data portion had to be discarded, but the code and the graphs that were pre-setup to receive the data can be found here.
Code Flow Chart
Video
The final component of the project was a video demonstrating the argons and sensors in action. Due to time constraints, the team could only meet up this one time which led to the code complication that could not be fixed in a reasonable amount of time but did not hinder the video making. Due to weather though the filming had to take place indoors and the third floor of the Popp Martin Student Union building was used to film. The video consisted of 5 major parts with a helmeted wheelchair passenger for a comical element. The intro was the first part and that covered the goal of the project and the circuit itself.
The second part of the video was a clip of the accelerometer being tested which doubled as a proximity sensor test. The third part showcased the tilt sensor and the 4th was a comical bit of the rider falling off a small stair in the chair to further explain the tilt sensor. The final part was a simple conclusion to the project and explaining how it would be expanded on in the future. A link to the video can be found here.
2 Minute Project Overview
DesignReport
To see the entire design report following this link.
// This #include statement was automatically added by the Particle IDE.#include<ThingSpeak.h>#include<Particle.h>TCPClientclient;unsignedintmyChannelNumber=1358740;//ThingSpeak infoconstchar*myWriteAPIKey="Y0D0V28Q7URAHLPY";// ThingSpeak infointObjectYes=1;intObjectNo=0;intSpeedYes=1;intSpeedNo=0;intTiltYes=1;intTiltNo=0;voidsetup(){Serial.begin(9600);Particle.publish("PowerOn",PRIVATE);Particle.publish("CheckConnection",PRIVATE);Particle.subscribe("ObjectY",WC1OY,MY_DEVICES);Particle.subscribe("ObjectN",WC2ON,MY_DEVICES);Particle.subscribe("SpeedY",WC3SY,MY_DEVICES);Particle.subscribe("SpeedN",WC4SN,MY_DEVICES);Particle.subscribe("TiltY",WC5TY,MY_DEVICES);Particle.subscribe("TiltN",WC6TN,MY_DEVICES);ThingSpeak.begin(client);}voidloop(){Particle.subscribe("ObjectY",WC1OY,MY_DEVICES);Particle.subscribe("ObjectN",WC2ON,MY_DEVICES);Particle.subscribe("SpeedY",WC3SY,MY_DEVICES);Particle.subscribe("SpeedN",WC4SN,MY_DEVICES);Particle.subscribe("TiltY",WC5TY,MY_DEVICES);Particle.subscribe("TiltN",WC6TN,MY_DEVICES);delay(500);// buffer for data collection}voidWC1OY(constchar*event,constchar*data){ThingSpeak.setField(1,ObjectYes);// writing data for graphingThingSpeak.writeFields(myChannelNumber,1,myWriteAPIKey);delay(16000);}voidWC2ON(constchar*event,constchar*data){ThingSpeak.setField(1,ObjectNo);// writing data for graphingThingSpeak.writeFields(myChannelNumber,0,myWriteAPIKey);delay(16000);}voidWC3SY(constchar*event,constchar*data){ThingSpeak.setField(2,SpeedYes);ThingSpeak.writeFields(myChannelNumber,1,myWriteAPIKey);delay(16000);}voidWC4SN(constchar*event,constchar*data){ThingSpeak.setField(2,SpeedNo);ThingSpeak.writeFields(myChannelNumber,0,myWriteAPIKey);delay(16000);}voidWC5TY(constchar*event,constchar*data){ThingSpeak.setField(3,TiltYes);ThingSpeak.writeFields(myChannelNumber,1,myWriteAPIKey);delay(16000);}voidWC6TN(constchar*event,constchar*data){ThingSpeak.setField(3,TiltNo);ThingSpeak.writeFields(myChannelNumber,0,myWriteAPIKey);delay(16000);}
Argon 2 Avoidance Sensor w/ Enabling
C/C++
intDetection=D6;// avoidance sensorintEnable=D7;// on / off pin for avoidance sensorintObj=HIGH;// no obstableintNoObj=LOW;// obstacleintval;voidsetup(){pinMode(Detection,INPUT);pinMode(Enable,OUTPUT);digitalWrite(Enable,LOW);Particle.subscribe("PowerOn",start,MY_DEVICES);Serial.begin(9600);}voidloop(){val=digitalRead(Detection);if(val==Obj){// no obstacledelay(50);// buffer timeParticle.publish("ObjectN",PRIVATE);delay(50);// Time for sensor to rest}if(val==NoObj){delay(50);// buffer timeParticle.publish("ObjectY",PRIVATE);delay(50);// Time for sensor to rest }}voidstart(constchar*event,constchar*data){digitalWrite(Enable,HIGH);}
Argon 3 Accelerometer and Tilt Sensor w/ Comms Check LED
C/C++
// This #include statement was automatically added by the Particle IDE.#include<MPU6050.h>#include<Wire.h> // accelerometer library#define MPU 0x68 // accelerometer stuffint16_tAcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;intTilt=D2;// Tilt pinintLED=D3;// connection indicationintval;// tilt variableintVcX;// velocityintVcY;// velocityintVcZ;// velocityintDeltaTime;intOldTime=0;intNewTime=60000;voidsetup(){Serial.begin(9600);Particle.subscribe("CheckConnection",test,MY_DEVICES);pinMode(Tilt,INPUT);pinMode(LED,OUTPUT);digitalWrite(LED,LOW);Wire.begin();// accelerometer setupWire.beginTransmission(MPU);Wire.write(0x6B);Wire.write(0);Wire.endTransmission(true);DeltaTime=NewTime-OldTime;// one minute interval as I believe data is sent every 60 seconds}voidloop(){Wire.beginTransmission(MPU);Wire.write(0x3B);Wire.endTransmission(false);Wire.requestFrom(MPU,12,true);AcX=Wire.read()<<8|Wire.read();AcY=Wire.read()<<8|Wire.read();AcZ=Wire.read()<<8|Wire.read();GyX=Wire.read()<<8|Wire.read();GyY=Wire.read()<<8|Wire.read();GyZ=Wire.read()<<8|Wire.read();delay(500);VcX=AcX*(DeltaTime/1000);VcY=AcY*(DeltaTime/1000);VcZ=AcZ*(DeltaTime/1000);if(VcX>2){Particle.publish("SpeedY",PRIVATE);}if(VcY>2){Particle.publish("SpeedY",PRIVATE);}if(VcZ>2){Particle.publish("SpeedY",PRIVATE);}if(VcX<2){Particle.publish("SpeedN",PRIVATE);}if(VcY<2){Particle.publish("SpeedN",PRIVATE);}if(VcZ<2){Particle.publish("SpeedN",PRIVATE);}val=digitalRead(Tilt);if(val==HIGH)// tilt sensor is tilted extremely aka wheelchair is knocked over{Particle.publish("TiltY",PRIVATE);}if(val==LOW){Particle.publish("TiltN",PRIVATE);}}voidtest(constchar*event,constchar*data){digitalWrite(LED,HIGH);delay(500);digitalWrite(LED,LOW);delay(500);}



_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



















Comments
Please log in or sign up to comment.