The story behind our project is simple, our apartment complex has bad and small parking spaces. We designed a parking sensor to go in front of our spot so we can easily know when we are in the clear to stop and park perfectly. It is useful because it will indicate the various lengths your car is away from the sensor so you can more accurately park your vehicle in any way you desire. Someone who is potentially older would utilize this product perfectly as the light is very easy to see so you can use our project to assist you in parking every day. Our newly acquired skills with IOT devices allows us to successfully program our sensors to communicate with each other and display various colors depending on the distance the car is from the sensor.
How It WorksUltrasonic Sensor:
The sensor has four pins: VCC, Trigger, Echo, and GND.
VCC is the power supply for the sensor and for our circuit it used 5V from the Particle Argon. The Trigger pin activates 8 ultrasonic sound pulses at 40 kHz. The Echo pin creates a pulse proportional to the time it takes for the trigger pulses to reflect back. The GND pin is used to ground the sensor when connected to the Particle Argon. Using the Echo pin we can find the time between pulses and use that value to find the distance of the object in front of the sensor.
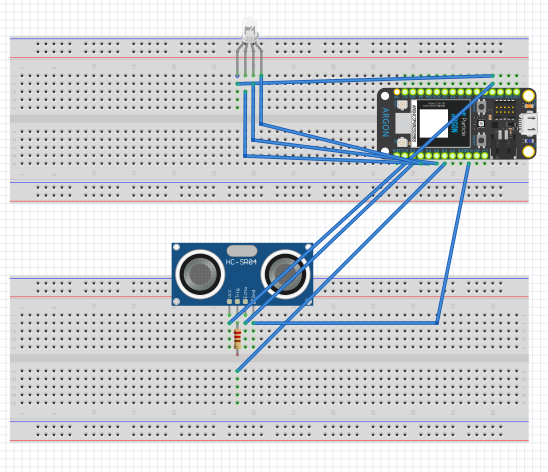
SetupSetup with Ultrasonic Sensor and RGB LED with first Particle Argon:
Ultrasonic Sensor:
- Trigger: Connected to D2
- Echo: Connect a 220 ohm resistor to the pin and connect to D6
- VCC: Connect to USB pin in the Particle Argon to supply 5V
- GND: Connect to GND pin in the Particle Argon to ground the sensor
RGB LED:
- Green: Connect to D5
- Blue: Connect to D4
- Red: Connect to D7
- GND: Connect to GND pin in the Particle Argon to ground the led
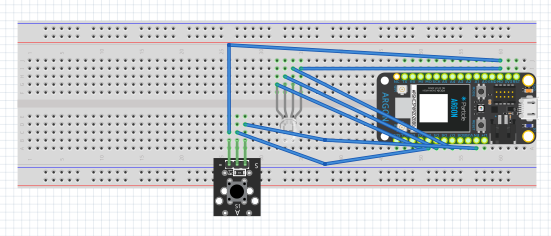
Setup with ButtonSwitch andRGB LED on Second Particle Argon:
Button Switch:
- Output: Connect to D1
- VCC: Connect to USB pin in the Particle Argon to supply 5V
- GND: Connect to GND pin in the Particle Argon to ground the button switch
RGB LED:
- Green: Connect to D4
- Blue: Connect to D6
- Red: Connect to D2
- GND: Connect to GND pin in the Particle Argon to ground the led
Flow Chart
Thing Speak Live Data Graphing
The data in this graph represents the distance calculated by the ultrasonic sensor as we take an object and move it closer to the sensor.




_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
















{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.