




Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 4 | |||
| × | 1 | ||||
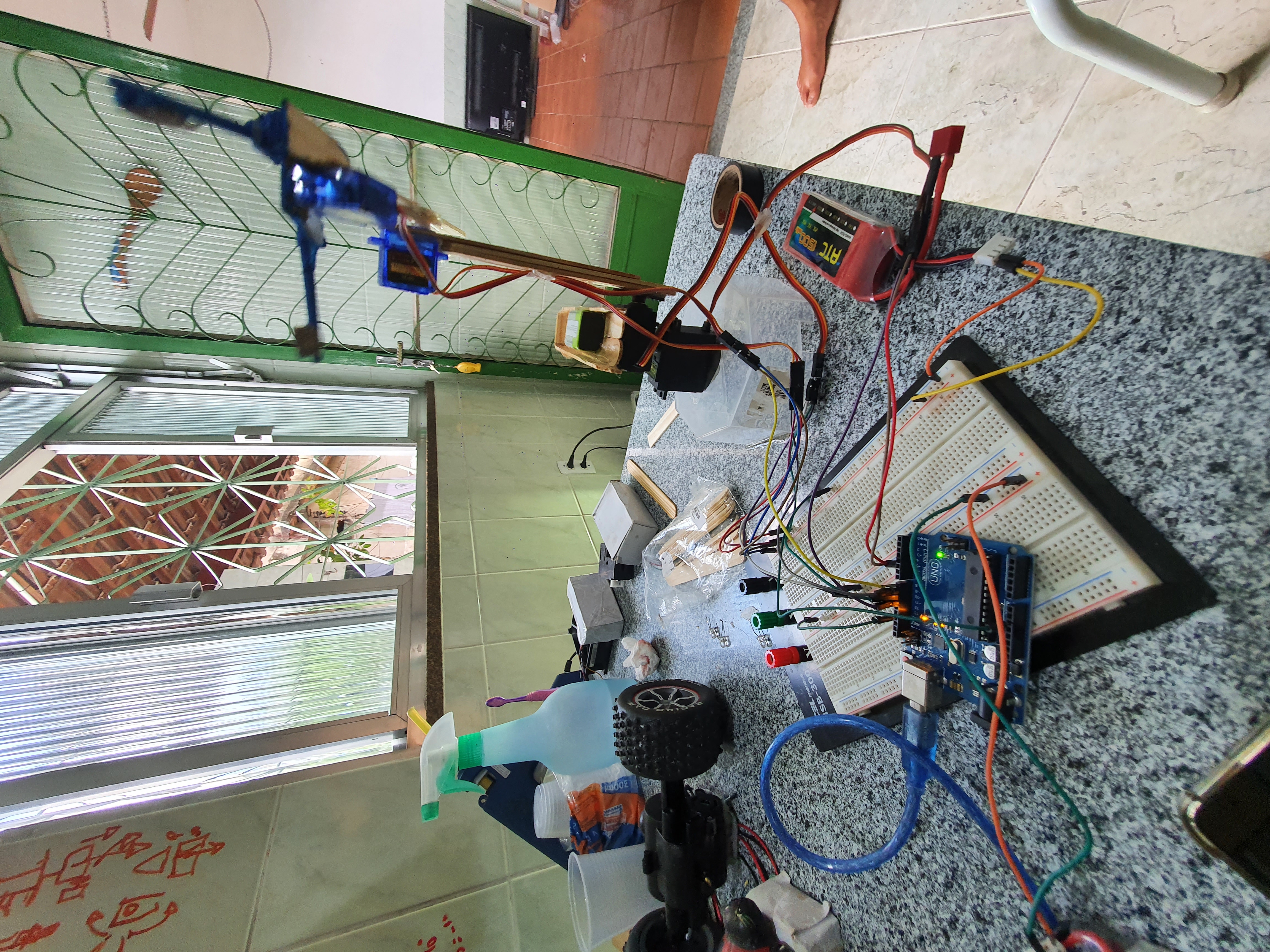
We already had constructed this arm before, but our motivation was to ask: "how can we differently control this arm?".
With this in mind, we built a system in Python to recognize our face and hand movements:
Therefore, with the use of the cv2 and MediaPipe libraries, we could understand and classify the fingers:
All left fingers down: turn clockwise
On left finger up: turn anti-clockwise
One right-hand finger up: move the X-axis servo motor.
Two right-hand fingers up: move the Y-axis servo motor.
And so on...
External battery to support the current of all servos
Our communication from Python to the Arduino's system was by UART.
Video of the project working: https://imgur.com/4hC5K3f
I will organize the Python code and I will update it here soon!






{kind=link}
Comments
Please log in or sign up to comment.