




Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
What is Home Automation ?
Home automation is building automation for a home, called a smart home or smart house. A home automation system will monitor and/or control home attributes such as lighting, climate, entertainment systems, and appliances. It may also include home security such as access control and alarm systems. When connected with the Internet, home devices are an important constituent of the Internet of Things.
Project AIM : Smart Module can control Home electronics Appliances using Smart phone, Touch Control, IR remote and voice assistant like Alexa and Google
By using CYPRESS chip able to achieve project aim.
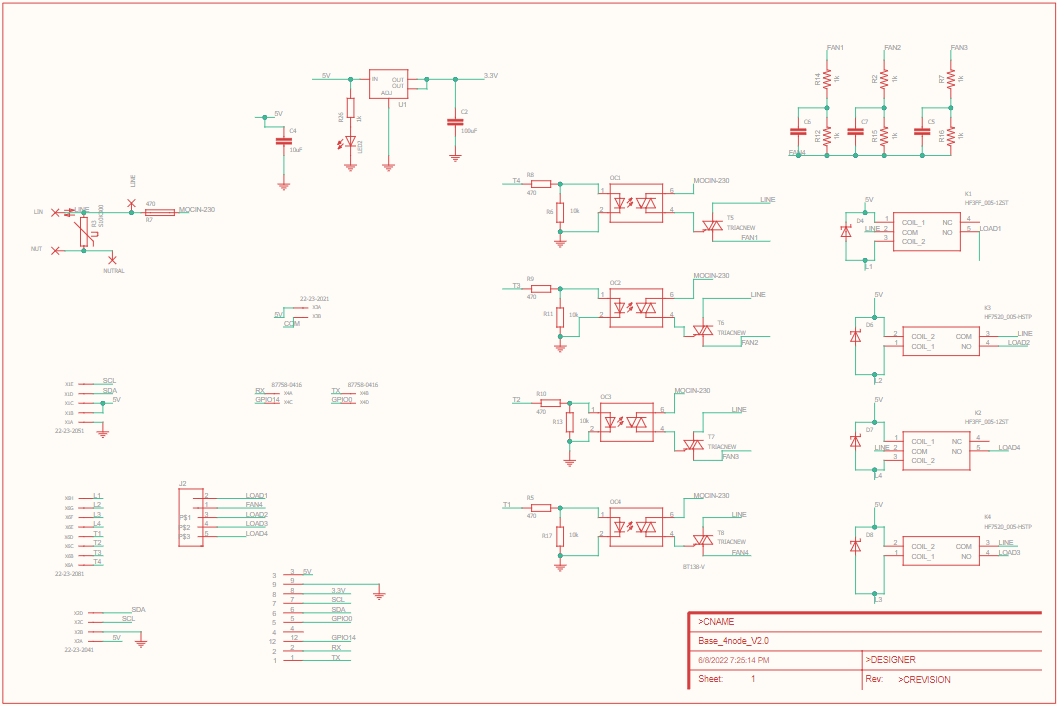
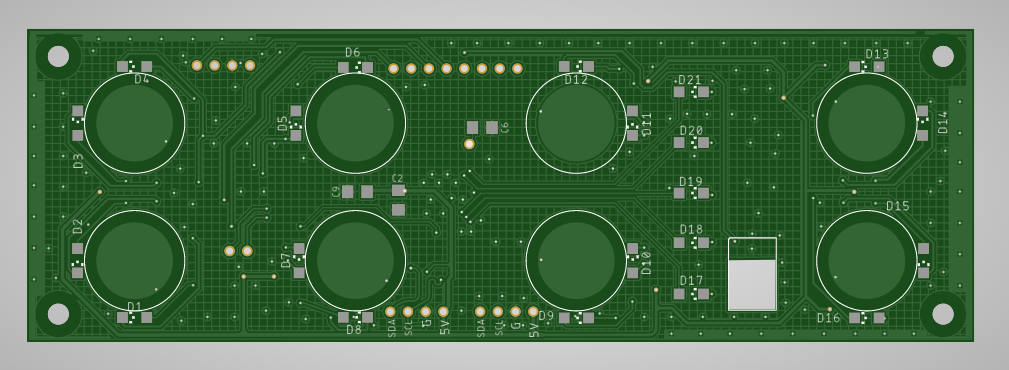
For the demo purpose we are starting with 4 light controls and 1 fan control. Below diagram is the schematic diagram of the power module.
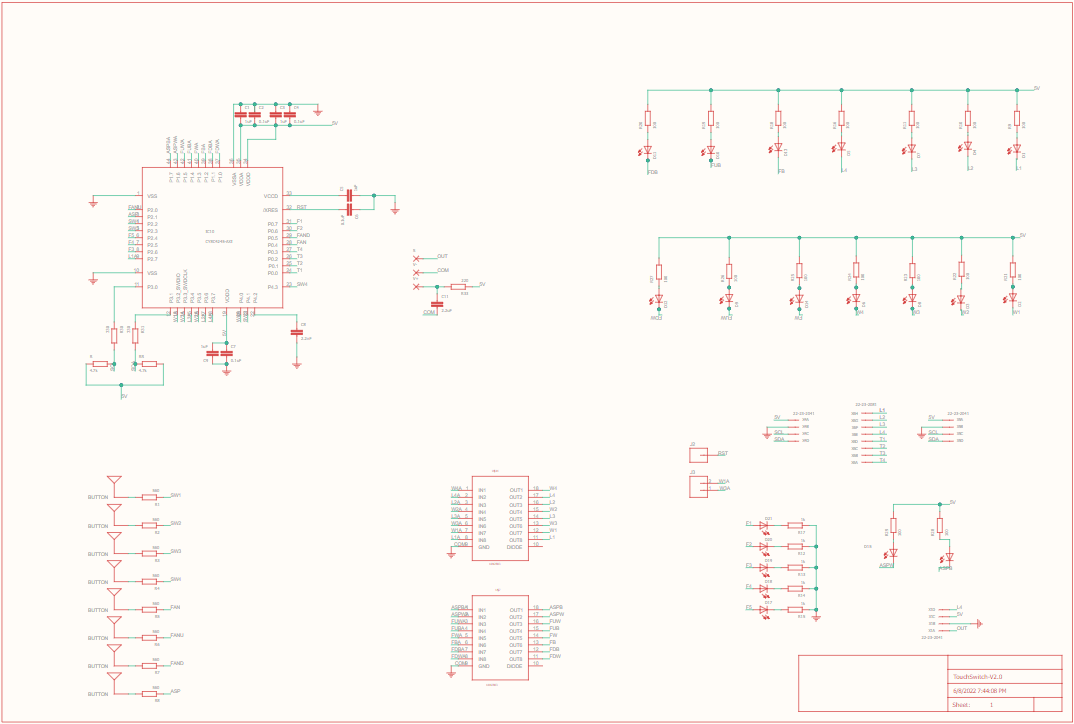
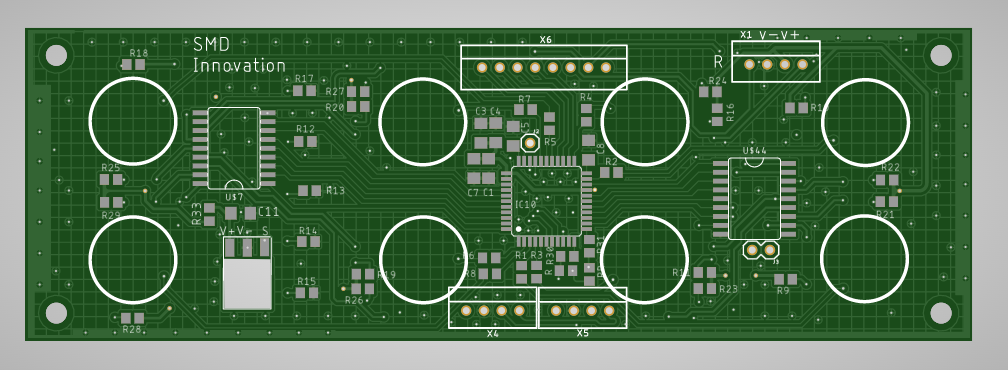
Below diagram is the schematic diagram of the touch module.
Bill of material : BOM.pdf
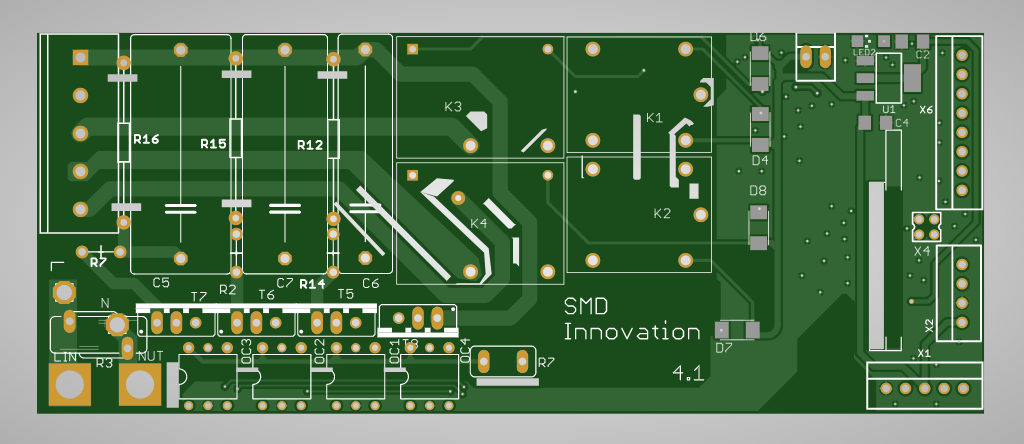
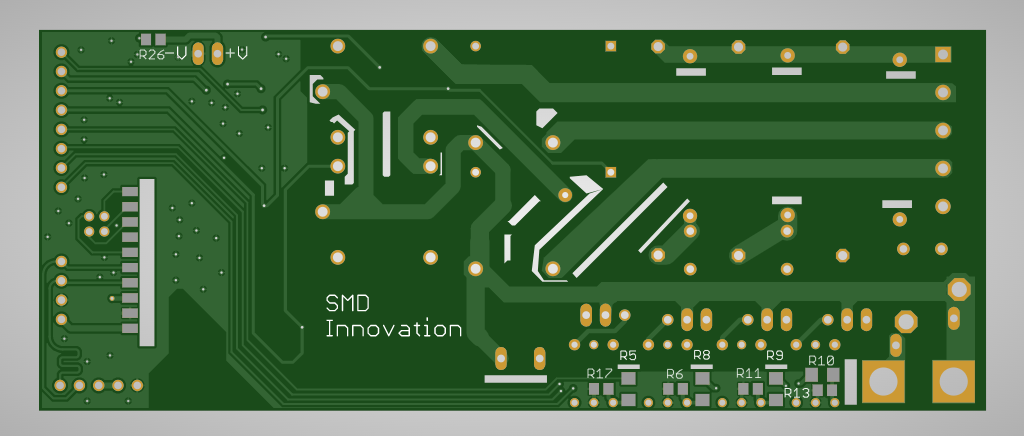
Power Module View :
Github : 4.1_POWER.zip
Touch Module View :
Github : 4.1_TOUCH.zip
Below snippet is to show module code which can handle all the operation perform by the user to control electronics appliances using smart home automation system.
Mode of Working :
1. Touch : Cypress capacitive touch can sense the user touch input, react based on last state of relay value.
2. Voice Command : Alexa publish MQTT message, ESP module subscribe that topic to receive those published message, I2C communication in between Cypress chip and ESP8266.
3. IR Remote : ESP8266 decode user input button, send command to cypress using I2C communication and cypress react based on input command.
4. Smart Phone : Smart phone publish MQTT message, ESP module subscribe that topic to receive those published message, I2C communication in between Cypress chip and ESP8266. Based on received command cypress react and handle relay.
Cypress Code :
#include "project.h"
#include "stdlib.h"
#include "cyapicallbacks.h"
void updateLoad(void);
void loadWrite(uint8,uint8);
void HandleError(void);
void i2cReceive(void);
#define LightloadNumber 4
#define FanLoadNumber 1
uint8 state_switch[LightloadNumber]; //status of touch switch
uint8 pre_switch[LightloadNumber]; //previous status of touch switch
uint8 state_load[LightloadNumber]; //status of load
uint8 state[LightloadNumber + FanLoadNumber + 1]; //state for communication
uint8 pre_state[LightloadNumber + FanLoadNumber + 1]; //state for communication
uint8 state_Fswitch[FanLoadNumber]; //status of fan switch
uint8 pre_Fswitch[FanLoadNumber]; //previous status of fan switch
uint8 fan_state[2];
uint8 state_Fan[FanLoadNumber]; //status of fan regulator
uint8 Switch[] = {0,1,2,3}; // touch swich for light load(cap sense button 0,1,2,3)
uint8 Load[] = {0,1,2,3}; //load connection for switch (L0,L1,L2,L3)(relay)
uint8 F_UP_DWN[2] = {5,4}; //fan up and down touch switch(cap sense button 5,6)
uint8 Fan[4] = {7,6,5,4}; //fan output connection(L4,L5,L6,L7)
uint8 Fan_led[5] = {12,11,10,9,8}; // fan speed indicator led(L8,L9,L10,L11,L12)
uint8 white_led_load[] = {13,14,15,16}; //white led for each load(L13,L14,L15,L16)
uint8 Fan_UDW[2] = {18,17}; //fan up down white led
uint8 Fan_UDB[2] = {22,21}; //fan up down blue led
// smd button down
/*
uint8 F_switch[] = {6}; //fan touch switch (cap sense button 4)
uint8 Fan_BW[2] = {20,19}; //fan blue and white led
uint8 Scenebut = {7}; //touch switch for smd pad(cap sense button 7)
uint8 scene_BW[2] = {23,24}; //smd switch up down blue led
*/
// smd button up
uint8 F_switch[] = {7}; //fan touch switch (cap sense button 4)
uint8 Fan_BW[2] = {24,23}; //fan blue and white led
uint8 Scenebut = {6}; //touch switch for smd pad(cap sense button 7)
uint8 scene_BW[2] = {19,20}; //smd switch up down blue led
uint8 ScenebutStatus = 0;
uint8 pre_ScenebutStatus = 0;
uint8 whiteLed = 1; //status of activation of white led of all loads
//i2c
uint8 i2cReadBuffer[(LightloadNumber + FanLoadNumber + 1)];
uint8 i2cWriteBuffer[(LightloadNumber + FanLoadNumber + 1)];
uint8 I2CFlag = 0u;
uint8 sceneled = 0;
uint8 speed = 0;
int onOffFlag = 0;
uint8 flag = 0;
void I2C_I2C_ISR_ExitCallback()
{
I2CFlag = 1;
}
int main(void)
{
memset(state_switch,0,sizeof(state_switch));
memset(pre_switch,0,sizeof(pre_switch));
memset(state,0,sizeof(state));
memset(state_load,0,sizeof(state_load));
memset(pre_state,0,sizeof(pre_state));
memset(state_Fswitch,0,sizeof(state_Fswitch));
memset(pre_Fswitch,0,sizeof(pre_Fswitch));
memset(fan_state,0,sizeof(fan_state));
memset(i2cReadBuffer,0,sizeof(i2cReadBuffer));
L13_Write(whiteLed);
L14_Write(whiteLed);
L15_Write(whiteLed);
L16_Write(whiteLed);
L17_Write(whiteLed);
L18_Write(whiteLed);
L19_Write(whiteLed);
L23_Write(whiteLed);
I2C_I2CSlaveInitReadBuf(i2cReadBuffer, (LightloadNumber + FanLoadNumber + 1));
I2C_I2CSlaveInitWriteBuf(i2cWriteBuffer, (LightloadNumber + FanLoadNumber + 1));
I2C_I2C_ISR_ExitCallback();
CyGlobalIntEnable;
CySysWdtWriteMode(CY_SYS_WDT_COUNTER1, CY_SYS_WDT_MODE_RESET);
CySysWdtWriteMatch(CY_SYS_WDT_COUNTER1, 0xFA00);
CySysWdtWriteClearOnMatch(CY_SYS_WDT_COUNTER1, 1u);
CySysWdtEnable(CY_SYS_WDT_COUNTER1_MASK);
CapSense_1_Start();
CapSense_1_InitializeAllBaselines();
I2C_Start();
for(;;)
{
if(0u == CapSense_1_IsBusy()){
/* Update all baselines */
CapSense_1_ProcessAllWidgets();
/* Start scanning all enabled sensors */
CapSense_1_ScanAllWidgets();
}
ScenebutStatus = CapSense_1_IsWidgetActive(Scenebut);
if(ScenebutStatus != pre_ScenebutStatus){
if(ScenebutStatus != 0 && onOffFlag == 0){
onOffFlag = 1;
for(int i = 0; i < LightloadNumber+FanLoadNumber; i++){
if(i<LightloadNumber)
loadWrite(Load[i],0);
state[i] = 0;
}
loadWrite(Fan_BW[0],0);
if(whiteLed == 1){
for(int i = 0; i < LightloadNumber; i++){
loadWrite(white_led_load[i],1);
}
loadWrite(Fan_BW[1],1);
}
}
else if(ScenebutStatus != 0 && onOffFlag == 1){
onOffFlag = 0;
for(int i = 0; i < LightloadNumber+FanLoadNumber; i++){
if(i<LightloadNumber)
loadWrite(Load[i],1);
state[i] = 1;
}
loadWrite(Fan_BW[0],1);
if(whiteLed == 1){
for(int i = 0; i < LightloadNumber; i++){
loadWrite(white_led_load[i],0);
}
loadWrite(Fan_BW[1],0);
}
}
pre_ScenebutStatus = ScenebutStatus;
}
if(state[0] != 1 && state[1] != 1 && state[2] != 1 && state[3] != 1 && state[4] != 1){
onOffFlag = 1;
}
else {
onOffFlag = 0;
}
if(state[0] == 1 && state[1] == 1 && state[2] == 1 && state[3] == 1 && state[4] == 1){
if(whiteLed == 1)
loadWrite(scene_BW[0],0);
loadWrite(scene_BW[1],1);
}
else {
if(whiteLed == 1)
loadWrite(scene_BW[0],1);
loadWrite(scene_BW[1],0);
}
for(uint8 i = 0 ; i < LightloadNumber ; i++){
state_switch[i] = CapSense_1_IsWidgetActive(Switch[i]);
if(state_switch[i] != pre_switch[i]){
if(state_switch[i] != 0){
if(state[i] != 0)
state_load[i] = 0;
else
state_load[i] = 1;
loadWrite(Load[i],state_load[i]);
state[i] = state_load[i] ? 1 : 0;
if(whiteLed == 1)
loadWrite(white_led_load[i],!(state_load[i]));
}
pre_switch[i] = state_switch[i];
}
}
state_Fswitch[0] = CapSense_1_IsWidgetActive(F_switch[0]);
if(state_Fswitch[0] != pre_Fswitch[0]){
if(state_Fswitch[0] != 0){
if(state[4] != 0)
state_Fan[0] = 0;
else
state_Fan[0] = 1;
loadWrite(Fan_BW[0],state_Fan[0]);
state[4] = state_Fan[0] ? 1 : 0;
if(whiteLed == 1)
loadWrite(Fan_BW[1],!(state_Fan[0]));
for (uint8 i = 0; i < 4; i++)
loadWrite(Fan[i], 0);
if(state[4] == 1){
if(speed == 1){
loadWrite(Fan[1], 1);
}
else if(speed == 2){
loadWrite(Fan[2], 1);
}
else if(speed == 3){
loadWrite(Fan[0], 1);
loadWrite(Fan[2], 1);
}
else if(speed == 4){
loadWrite(Fan[1], 1);
loadWrite(Fan[2], 1);
}
else if (speed == 5){
loadWrite(Fan[3], 1);
}
}
else if(state[4] == 0){
for (uint8 i = 0; i < 4; i++)
loadWrite(Fan[i], 0);
}
}
pre_Fswitch[0] = state_Fswitch[0];
}
if(CapSense_1_IsWidgetActive(F_UP_DWN[0]) != fan_state[0]){
if(CapSense_1_IsWidgetActive(F_UP_DWN[0]) != 0){
if(speed != 5)
speed++; //fan state[3] increase by 1
else
speed = 0;
fan_state[0] = !(fan_state[0]);
loadWrite(Fan_UDW[0],0); // fan up white led off
loadWrite(Fan_UDB[0],1); //fan up blue led on
}
else{
loadWrite(Fan_UDB[0],0); //fan up blue led off
if(whiteLed == 1)
loadWrite(Fan_UDW[0],1); //fan up white led off
}
fan_state[0] = (CapSense_1_IsWidgetActive(F_UP_DWN[0]));
}
if(CapSense_1_IsWidgetActive(F_UP_DWN[1]) != fan_state[1]){ //check if fan down touch pad is pressed
if(CapSense_1_IsWidgetActive(F_UP_DWN[1]) != 0){
if(speed != 0)
speed--; //fan state[3] decrease by 1
else
speed = 5;
fan_state[1] = !(fan_state[1]);
loadWrite(Fan_UDW[1],0);
loadWrite(Fan_UDB[1],1);
}
else{
loadWrite(Fan_UDB[1],0);
if(whiteLed == 1)
loadWrite(Fan_UDW[1],1);
}
fan_state[1] = (CapSense_1_IsWidgetActive(F_UP_DWN[1]));
}
if(speed == 0){
state[5] = 0;
for(int i = 0;i<5;i++){
loadWrite(Fan_led[i],0);
}
}
else if(speed == 1){
state[5] = 1;
loadWrite(Fan_led[0],1);
for(int i = 1;i<5;i++){
loadWrite(Fan_led[i],0);
}
}
else if(speed == 2){
state[5] = 2;
for(int i = 0;i<2;i++){
loadWrite(Fan_led[i],1);
}
for(int i = 2;i<5;i++){
loadWrite(Fan_led[i],0);
}
}
else if(speed == 3){
state[5] = 3;
for(int i = 0;i<3;i++){
loadWrite(Fan_led[i],1);
}
for(int i = 3;i<5;i++){
loadWrite(Fan_led[i],0);
}
}
else if(speed == 4){
state[5] = 4;
for(int i = 0;i<4;i++){
loadWrite(Fan_led[i],1);
}
loadWrite(Fan_led[4],0);
}
else if(speed == 5){
state[5] = 5;
for(int i = 0;i<5;i++){
loadWrite(Fan_led[i],1);
}
}
if(state[5] != pre_state[5]){
for (uint8 i = 0; i < 4; i++)
loadWrite(Fan[i], 0);
if(state[4] == 1){
if(speed == 1){
loadWrite(Fan[1], 1);
}
else if(speed == 2){
loadWrite(Fan[2], 1);
}
else if(speed == 3){
loadWrite(Fan[0], 1);
loadWrite(Fan[2], 1);
}
else if(speed == 4){
loadWrite(Fan[1], 1);
loadWrite(Fan[2], 1);
}
else if (speed == 5){
loadWrite(Fan[3], 1);
}
}
//pre_state[5] = state[5];
}
if(I2CFlag != 0)
{
I2CFlag = 0;
if (0u != (I2C_I2C_SSTAT_WR_CMPLT & I2C_I2CSlaveStatus()))
{
i2cReceive();
I2C_I2CSlaveClearWriteBuf();
(void) I2C_I2CSlaveClearWriteStatus();
}
if(0u != (I2C_I2C_SSTAT_RD_CMPLT & I2C_I2CSlaveStatus()))
{
I2C_I2CSlaveClearReadBuf();
(void) I2C_I2CSlaveClearReadStatus();
}
}
for(uint8 i = 0 ; i < LightloadNumber + FanLoadNumber + 1; i++){
if(state[i] != pre_state[i]){
if((I2C_I2C_SSTAT_RD_BUSY & I2C_I2CSlaveStatus()) == 0){
pre_state[i] = state[i];
i2cReadBuffer[i] = state[i];
}
}
}
CySysWatchdogFeed(CY_SYS_WDT_COUNTER1);
}
}
void i2cReceive(void){
for (uint8 i = 0; i < LightloadNumber; i++) {
state[i] = i2cWriteBuffer[i];
if (state[i] == 0) {
loadWrite(Load[i],0);
if(whiteLed == 1)
loadWrite(white_led_load[i],1);
}
else if (state[i] == 1) {
loadWrite(Load[i], 1);
loadWrite(white_led_load[i],0);
}
}
state[4] = i2cWriteBuffer[4];
if(state[4] != 0)
state_Fan[0] = 0;
else
state_Fan[0] = 1;
loadWrite(Fan_BW[0],!state_Fan[0]);
loadWrite(Fan_BW[1],(state_Fan[0]));
state[5] = i2cWriteBuffer[5];
speed = i2cWriteBuffer[5];
for (uint8 i = 0; i < 4; i++)
loadWrite(Fan[i], 0);
if(state[4] == 1){
if(speed == 1){
loadWrite(Fan[1], 1);
}
else if(speed == 2){
loadWrite(Fan[2], 1);
}
else if(speed == 3){
loadWrite(Fan[0], 1);
loadWrite(Fan[2], 1);
}
else if(speed == 4){
loadWrite(Fan[1], 1);
loadWrite(Fan[2], 1);
}
else if (speed == 5){
loadWrite(Fan[3], 1);
}
}
}
void loadWrite(uint8 loadpin,uint8 state){
switch(loadpin){
case 0:
L0_Write(state);
break;
case 1:
L1_Write(state);
break;
case 2:
L2_Write(state);
break;
case 3:
L3_Write(state);
break;
case 4:
L4_Write(state);
break;
case 5:
L5_Write(state);
break;
case 6:
L6_Write(state);
break;
case 7:
L7_Write(state);
break;
case 8:
L8_Write(state);
break;
case 9:
L9_Write(state);
break;
case 10:
L10_Write(state);
break;
case 11:
L11_Write(state);
break;
case 12:
L12_Write(state);
break;
case 13:
L13_Write(state);
break;
case 14:
L14_Write(state);
break;
case 15:
L15_Write(state);
break;
case 16:
L16_Write(state);
break;
case 17:
L17_Write(state);
break;
case 18:
L18_Write(state);
break;
case 19:
L19_Write(state);
break;
case 20:
L20_Write(state);
break;
case 21:
L21_Write(state);
break;
case 22:
L22_Write(state);
break;
case 23:
L23_Write(state);
break;
case 24:
L24_Write(state);
break;
}
}
void HandleError(void)
{
/* Disable all interrupts. */
__disable_irq();
/* Infinite loop. */
while(1u) {}
}
/* [] END OF FILE */
Arduino Code :
#include <Wire.h>
#ifndef UNIT_TEST
#include <Arduino.h>
#endif
#include <IRremoteESP8266.h>
#include <IRrecv.h>
#include <IRutils.h>
#define CAPTURE_BUFFER_SIZE 1024
#define TIMEOUT 15U
uint16_t RECV_PIN = 14;
IRrecv irrecv(RECV_PIN, CAPTURE_BUFFER_SIZE, TIMEOUT, true);
decode_results results; // Somewhere to store the results
int sCount = 6;
int data[6] = {0, 0, 0, 0, 0, 0};
byte i2cadd = 8;
String t = "";
unsigned long delay1 = 0;
void setup() {
Serial.begin(115200);
pinMode(D4, OUTPUT);
irrecv.enableIRIn();
Serial.print("Pin : ");
Serial.println(RECV_PIN);
Wire.begin(D6, D7);
}
void loop() {
if (irrecv.decode(&results)) {
serialPrintUint64(results.value, HEX);
Serial.println("");
if (results.value == 0x00000B69 || results.value == 0x00000369) // light 1
{
Serial.println("light 1");
data[0] = !data[0];
for (int i = 0; i < sCount; i++)
Serial.print(data[i]);
Serial.println();
i2cWrite(data);
}
else if (results.value == 0x00000B6A || results.value == 0x0000036A) // light 2
{
Serial.println("light 2");
data[1] = !data[1];
for (int i = 0; i < sCount; i++)
Serial.print(data[i]);
Serial.println();
i2cWrite(data);
}
else if (results.value == 0x00000B6B || results.value == 0x0000036B) // light 3
{
Serial.println("light 3");
data[2] = !data[2];
for (int i = 0; i < sCount; i++)
Serial.print(data[i]);
Serial.println();
i2cWrite(data);
}
else if (results.value == 0x00000B6C || results.value == 0x0000036C) // light 4
{
Serial.println("light 4");
data[3] = !data[3];
for (int i = 0; i < sCount; i++)
Serial.print(data[i]);
Serial.println();
i2cWrite(data);
}
else if (results.value == 0x00000B71 || results.value == 0x00000371) // fan on off
{
Serial.println("fan switch");
data[4] = !data[4];
for (int i = 0; i < sCount; i++)
Serial.print(data[i]);
Serial.println();
i2cWrite(data);
}
else if (results.value == 0x00000B73 || results.value == 0x00000373) //fan up
{
Serial.println("fan up");
if (data[5] != 5)
data[5]++;
else
data[5] = 0;
for (int i = 0; i < sCount; i++)
Serial.print(data[i]);
Serial.println();
i2cWrite(data);
}
else if (results.value == 0x00000B74 || results.value == 0x00000374) // fan down
{
Serial.println("fan down");
if (data[5] != 0)
data[5]--;
else
data[5] = 5;
for (int i = 0; i < sCount; i++)
Serial.print(data[i]);
Serial.println();
i2cWrite(data);
}
else if (results.value == 0x00000B7E || results.value == 0x0000037E) // All On Off
{
Serial.println("all on off");
if (data[0] == 1 && data[1] == 1 && data[2] == 1 && data[3] == 1 && data[4] == 1) {
data[0] = 0; data[1] = 0; data[2] = 0; data[3] = 0; data[4] = 0;
}
else if (data[0] == 0 && data[1] == 0 && data[2] == 0 && data[3] == 0 && data[4] == 0) {
data[0] = 1; data[1] = 1; data[2] = 1; data[3] = 1; data[4] = 1;
}
else {
data[0] = 0; data[1] = 0; data[2] = 0; data[3] = 0; data[4] = 0;
}
for (int i = 0; i < sCount; i++)
Serial.print(data[i]);
Serial.println();
i2cWrite(data);
}
irrecv.resume(); // Receive the next value
}
if (abs(millis() - delay1) > 50) {
//if (abs(millis() - delay1) > 1000) {
delay1 = millis();
//Serial.println("------------");
if (Wire.requestFrom(i2cadd, sCount, true)) {
for (int i = 0; i < sCount; i++) {
data[i] = Wire.read();
//Serial.print(data[i]);
//Serial.print(" ");
}
//Serial.println();
}
}
}
void i2cWrite(int data[]) {
Serial.println("i2cWrite");
Wire.beginTransmission(i2cadd);
for (int i = 0; i < sCount; i++) {
t = String(data[i]); Serial.print(t); Serial.print(" "); Wire.write(byte(t.toInt()));
}
Serial.println();
Wire.endTransmission();
}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


Comments