




Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
After the flexible policy in the early 2000s regarding non-military use of Unmanned Aerial Vehicles (UAVs) which are commonly known as Drones with the real purpose to use in Relief Activities, border surveillance, and several other purposes that benefits every aspect of some means. The mass production of recreational drones only started after it was successful in use by government agencies. Now, we do have several options to acquire the drone depending on our requirements. With all these flexible policies and advancements in the technology of EAVs, Drone is very much a household name currently where the basic principle is very much identical to every brand. We’ve also implemented similar principle and in addition, we implemented a google map API in which users will use an app by activating their location service to give the precise location and can request the drone. After the drone is dispatched real-time status will be updated via different mediums like app notification, live tracking in the app, and SMS text. In this drone, we have used AI-enabled environmental gas sensor BOSCH BME688 which is customizable for sensitivity, selectivity, data rate, and power consumption. Similarly, in regards to safety we have implemented all sorts of safety procedures by classifying the status of the drone i.e., during request, during dispatch, arrival, and finally departure from the user’s location
Background: -The literal meaning of Drones is unmanned aerial vehicles. Earlier drones were used commonly in the military which helped to bring a significant difference in building up military strategy and implementing them. Though drones remained in military use for a long time, the use of drones for non-military use only started in the early 2000s by government agencies for disaster relief, border surveillance, and wildfire fighting, while corporations began using drones to inspect pipelines and spray pesticides on farms. After the successful use of drones by government agencies and corporations the use of drones for recreational use is also becoming common. We can easily get low-cost beginner-friendly highly sophisticated drones as per the requirement for our use. Similarly, due to convenience and affordability, the use of drones are fun and useful tools that everyone can use and enjoy by remaining under every restriction. Moreover, with the advancement in drone development, companies like Amazon are considering using drones as a delivery method in the upcoming days.
Introduction: -A drone is not a new technology anymore and the basic principles of this technology are identical to each other no matter which company manufactures it. But on this project, we implemented a google map API in which users will use an app by activating their location service to give the precise location (Longitude and Latitude) and can request the drone. Each status (such as order received, drone dispatch, and drone arrival time) will be updated via app notification, live tracking in the app, and SMS text.
BOSCH BME688 is used in this project to sample the air. Its AI-enabled environmental gas sensor is used in this project for testing. These compact and low-power sensors can detect a broad range of gases in part per billion (ppb) range. The gas scanner can be customized for sensitivity, selectivity, data rate, and power consumption and can be trained for a specific application using the Bosch BME AI-Studio tool. For example, in a drone or rover application, the presence of volatile sulfur compounds (VSCs) can be used as an indicator for bacteria growth in food crops.
Methodology: -After the request from the user the drone will be dispatched to the user’s location and by using image processing, we can determine a safe place for the drone to land and collect the sample. In case the user forgets or is unable to submit a sample deposit or response once landed. At a certain time, it will fly back to the base after informing the user via text message and app notification.
When the drone is requested by the user, the request is saved in the Google Firebase Realtime Database.
- When the drone is requested by the user, the request is saved in the Google Firebase Realtime Database.
The system calculated the distance and the available battery to complete the mission. If the distance is within reach, the drone takes off with Mr. Buggy. During landing, the drone utilizes a camera and ultrasonic sensor that is attached to the drone to determine a safe landing.
- The system calculated the distance and the available battery to complete the mission. If the distance is within reach, the drone takes off with Mr. Buggy. During landing, the drone utilizes a camera and ultrasonic sensor that is attached to the drone to determine a safe landing.
Once landed, Mr. Buggy comes out of the drone and goes inside the building to collect the sample. This whole process can be observed by the operators back in the base station and can intervene in the robot’s motion control.
- Once landed, Mr. Buggy comes out of the drone and goes inside the building to collect the sample. This whole process can be observed by the operators(from the video feed) back in the base station and can intervene in the robot’s motion control in any case.
Upon completion of the mission (collection of the air sample), Mr. Buggy returns to the drone and the drone takes off back to the base station.
- Upon completion of the mission (collection of the air sample), Mr. Buggy returns back to the drone and the drone takes off back to the base station.
This whole process is shown in the following video:
Features: -Safety is our main priority in this project. To order this drone testing service, a user will be required to watch a small safety video that contains information about what should keep in mind:
After they request this drone service.
- After they request this drone service.
- After a drone is dispatched.
- When the drone arrives.
- When the drone leaves the user’s location.
During arrival landing and when it’s time for the drone to leave the user’s location, it will use image processing (computer vision) and sensors (ultrasonic) to see if it is safe to arm and fly back. If the user is still standing close to the drone, it will provide a notification to the user in all forms and in addition to that, the buzzer located in the drone will start buzzing and only fly when it's safe to do so.
Hardware and Software Used.HoverGames Drone Development Kit
- HoverGames Drone Development Kit
- HoverGames Rover Kit
- NavQ+
- GPS: GPS NEO-M8N module
- GOOGLE MAP API Ultrasonic sensor ANDROID/ IOS Platform for user end app Google Firebase for backend database
- A good resolution camera for NavQ+ (all image processing will be done using NavQ+)
- Bosch Gas sensor, BME688 Is used to sample the air quality
This project can be modified as per the application. For example, if there is a fire, we can make a drone to drop a payload to a firefighter in the desired location, anything related.
Project Status:-The project is in the phase to complete the simulation, as we finish the simulation, this will be implemented in the actual hardware.
Appendix:-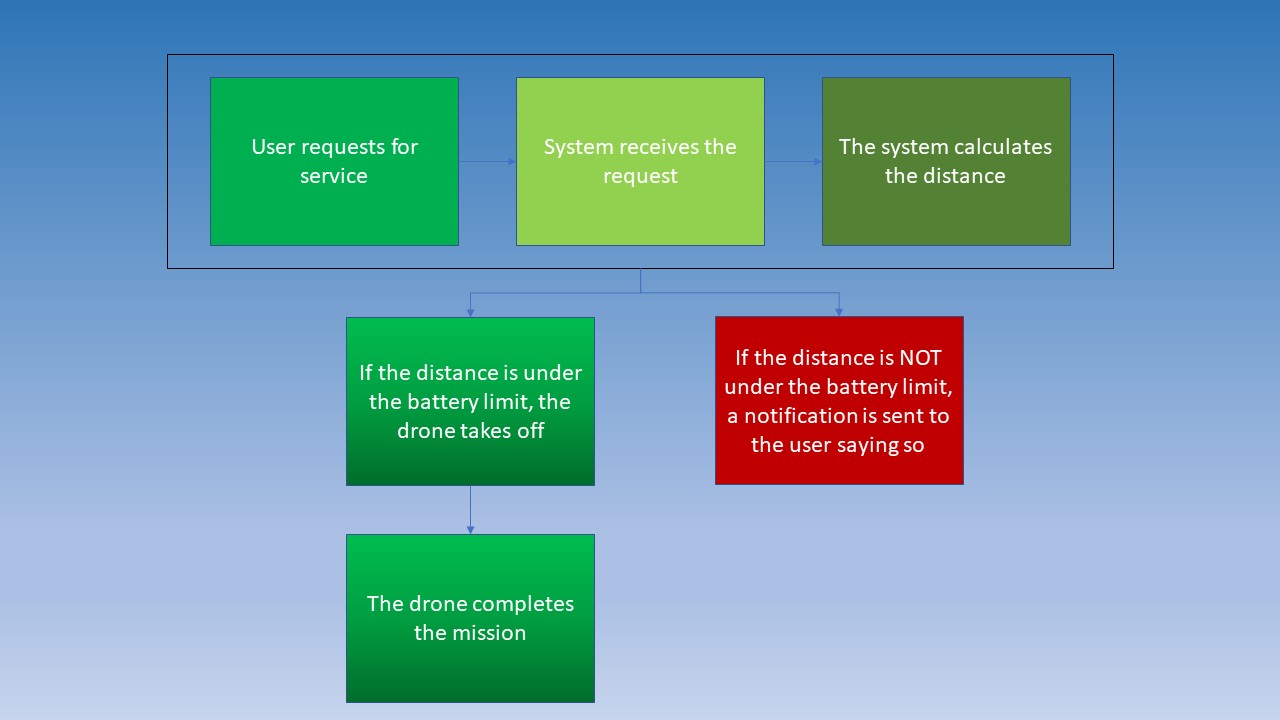







{kind=link}
Comments
Please log in or sign up to comment.