





Hardware components | ||||||
_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
It all started with grandparents forgetting to close the refrigerator door more than a couple times when visiting their 3-month old granddaughter. Leaving the refrigerator door open for extended periods exposed breast milk to unsafe temperature levels and had to be discarded too many times. Because breast milk supply was limited, I knew something needed to be done. That's when I thought of developing a refrigerator monitoring device that would send an email or text message to let me know that the refrigerator door had been left open and needed to be closed.
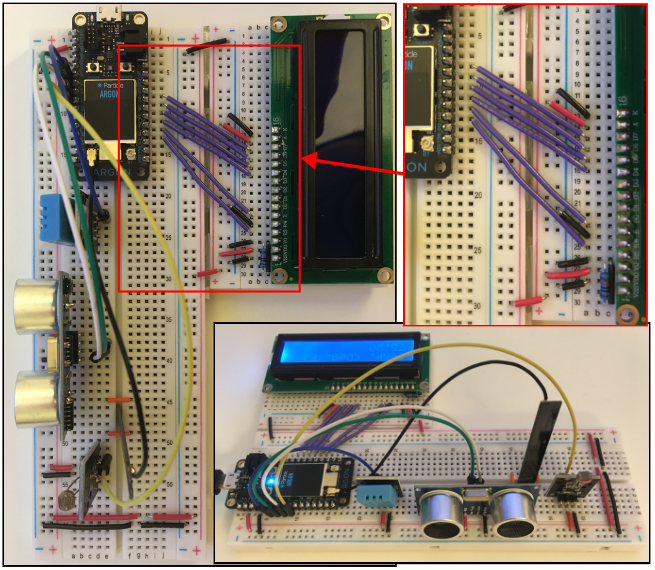
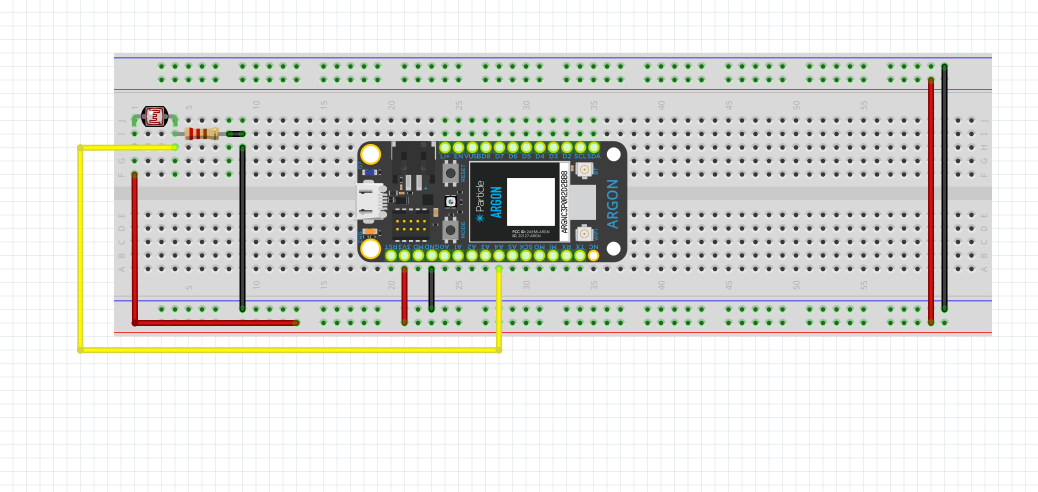
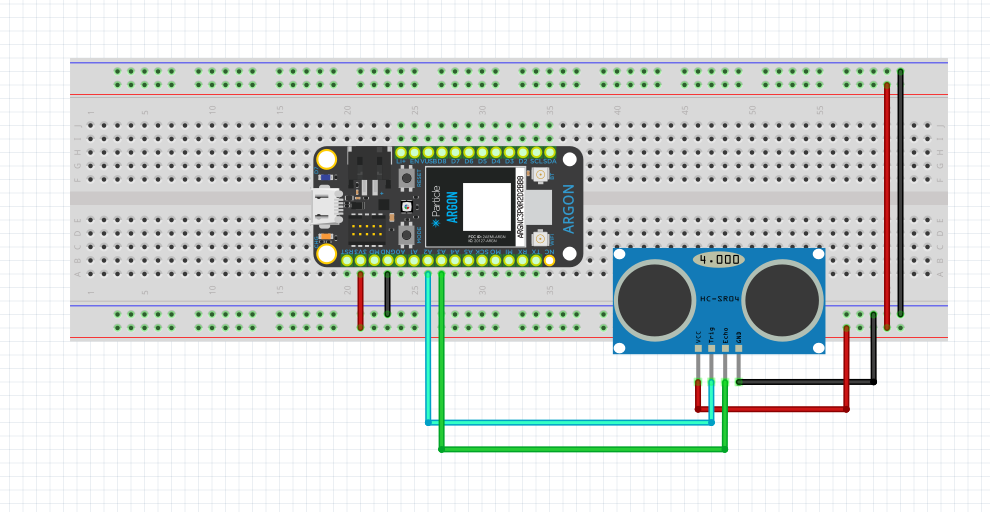
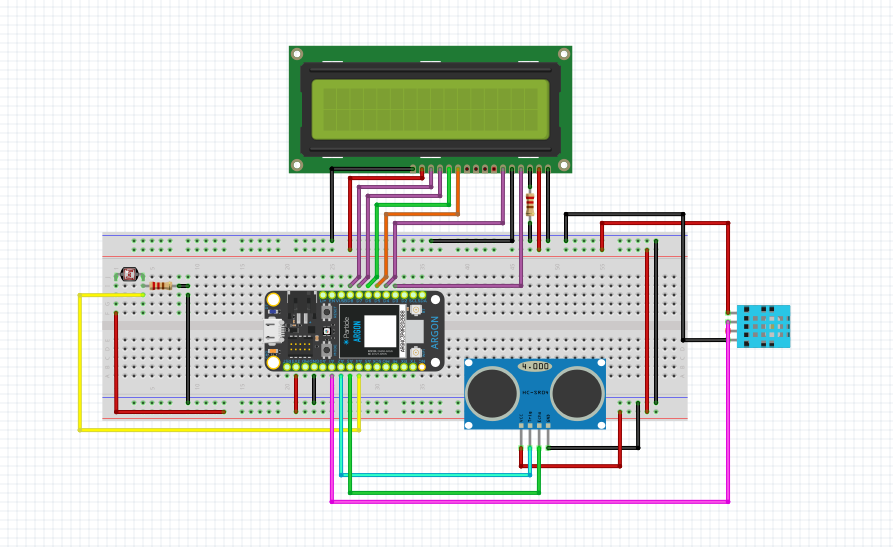
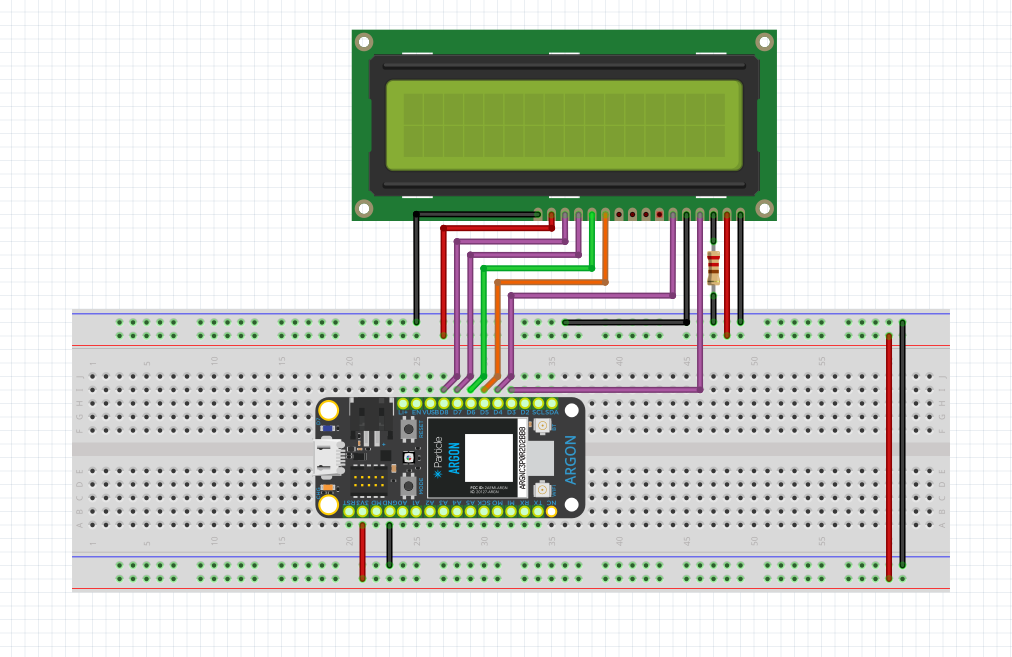
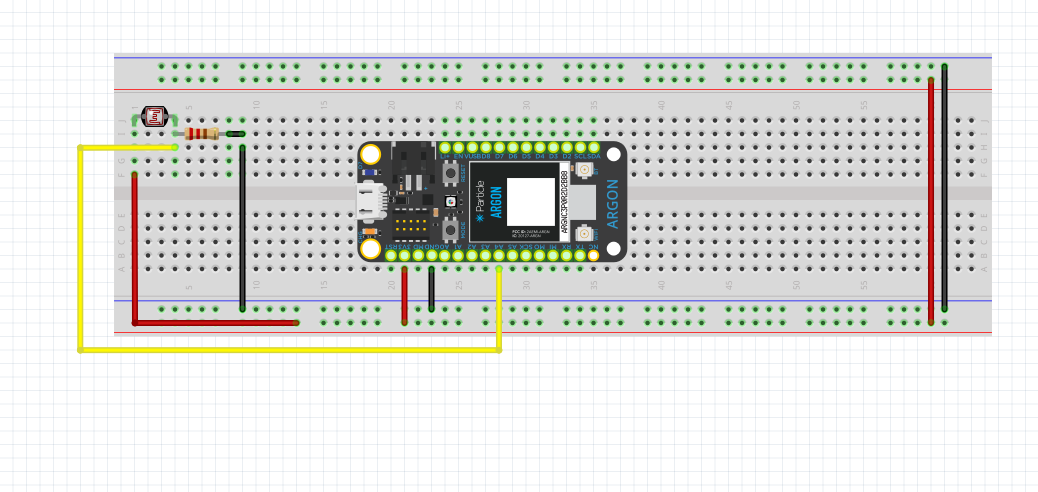
The objective of our project was to design a device that would monitor the inside of a refrigerator by using a cluster of three sensors (Figure 1) and collecting temperature, photoresistor, and ultrasonic readings throughout the day, and alert the user via email if the door was left open. A temperature sensor was used to monitor the inside temperature of the refrigerator. Temperature readings were then used to compare it to a set threshold of 40 degrees Fahrenheit, which if it was surpassed, served as one of three indicators to make the decision that the door had been left open. The second sensor implemented was a photoresistor sensor, also known as a light dependent resistor. This sensor was used as the second indicator to make the decision that the refrigerator door had been left open by detecting if the light bulb inside the refrigerator was on (indicating that the door was left open) or off (indicating that the door was closed). A measured photoresistor value above the threshold value of 3200 indicated that the light bulb was off, and any value below 3200 indicated that the light was on. Lastly, the third sensor implemented in the refrigerator monitoring system was the ultrasonic sensor, which served to measure the distance between the sensor and the inside of the door. A threshold value of 20 cm was then used as an indicator to draw conclusions about the door being closed or open. Any value below 20 cm indicated that the door was closed and any value above 20 cm indicated that the door had been left open.
Figure 2 shows a typical event that is published every 5 minutes along with the measured temperature, the photoresistor, and the ultrasonic values.
The use of these three sensors altogether allowed us then to determine whether the refrigerator door had been left open or not. If was then concluded that the refrigerator door had been left open when the temperature reading was above 40 degrees Fahrenheit, the photoresistor reading was below 3200, and the ultrasonic reading was above 20 cm (Figures 3 and 4).
All three sensors measurements were then plotted in a different channel for each Particle Argon using ThingSpeak for visualization purposes. Neal's ThingSpeak channel link is provided below for viewing, and a sample screenshot is shown in Figure 5, which depicts a Temperature vs. Time, Photoresistor Resistance vs. Time, and Ultrasonic Distance vs. Time plots.
Neal's Channel: https://thingspeak.com/channels/2086340
Seth's Channel: https://thingspeak.com/channels/2106700
Rahul's Channel: https://thingspeak.com/channels/2106709
Once it was determined that the refrigerator door had been left open (the temperature reading was above 40 degrees Fahrenheit, the photoresistor reading was below 3200, and the ultrasonic reading was above 20 cm), an email was sent to the user that has refrigerator door was opened. This email was sent by integrating Webhooks and IFTTT, and it simply let the user know that the refrigerator door was left opened. As shown in Figure 6, Neal received an email to close his refrigerator door after his Argon identified the refrigerator door as being open.
Two-way communication between the 3 Particle Argons was implemented with IFTTT, and emails to peers were sent to remind the user to close the user's refrigerator door. To demonstrate the two-way communication, as shown in Figure 7, Neal received an email to remind Seth to close his refrigerator door after Seth's Argon determined that the refrigerator door was left opened, and as shown in Figure 8, Seth received an email to remind Neal to close his refrigerator door after Neal's Argon determined that the refrigerator door was left opened.
A link to a video describing the refrigerator monitoring sensor cluster is provided below.
Refrigerator Monitoring System Physical Wiring








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.