#v01 2023
from time import sleep #importing sleep class
from machine import Pin, ADC, PWM #importing Pin, ADC and PWM classes
from neopixel import NeoPixel #importing NeoPixel (RGB lights) class
import machine
import utime
brg = 0.50
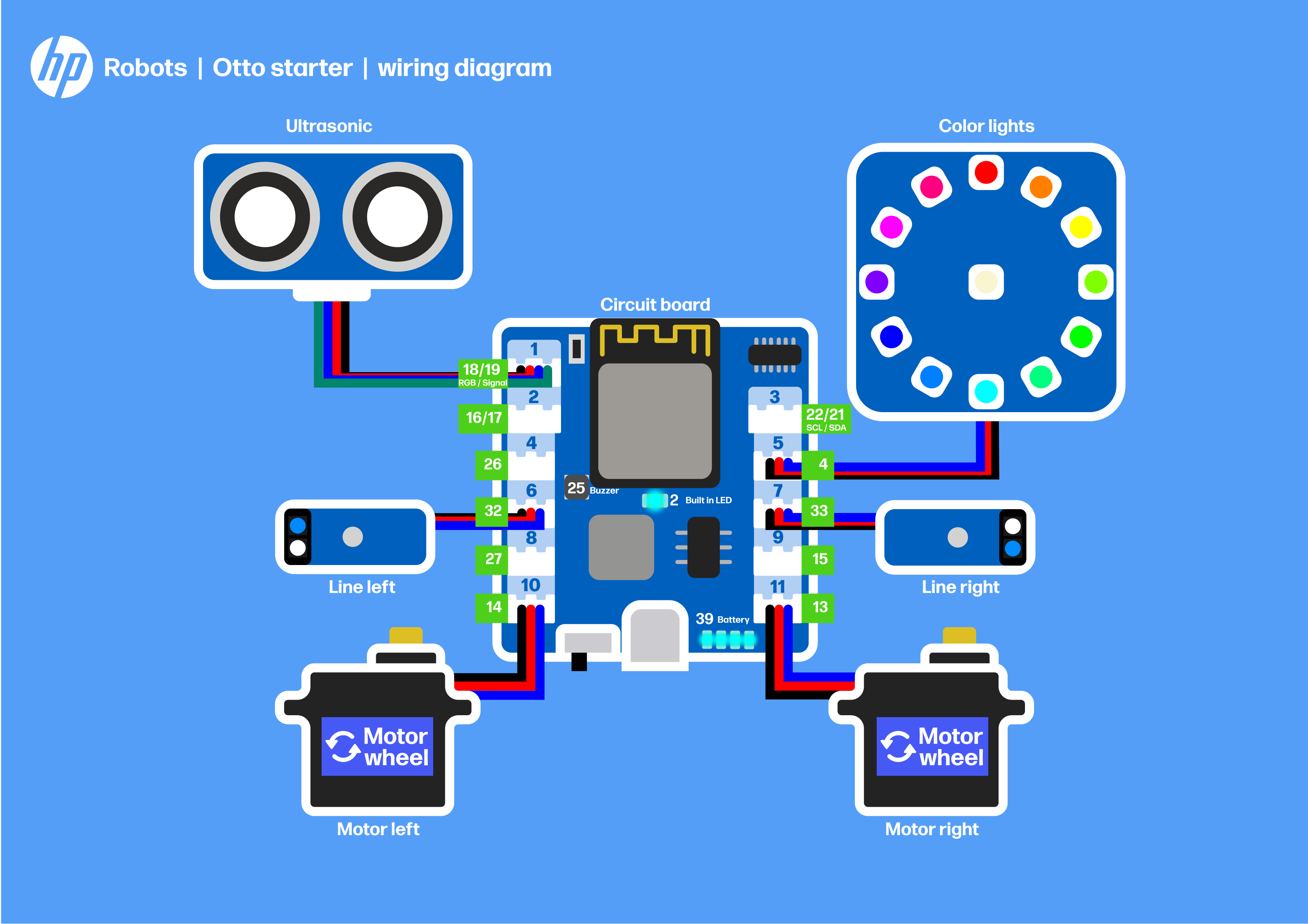
pixels = NeoPixel(Pin(4), 13) # Connector 5
leftServo = PWM(Pin(14)) # Connector 10
leftServo.freq(50)
rightServo = PWM(Pin(13)) # Connector 11
rightServo.freq(50)
builtinled = machine.Pin(2, machine.Pin.OUT) #built in LED
analogL=ADC(Pin(32)) #Connector 6
analogR=ADC(Pin(33)) #Connector 7
digitalL = machine.Pin(27, machine.Pin.IN) #Connector 8
digitalR = machine.Pin(15, machine.Pin.IN) #Connector 9
buzzer = PWM(Pin(25, Pin.OUT), freq=440, duty=512) #built in buzzer
ultrasonicRGB = NeoPixel(Pin(18), 6) # Connector 1
numberleds = 13
delaytime = 0.05
builtinled.off()
def red():
global i, numberleds, delaytime
for i in range(numberleds):
pixels[i] = (int(255 * brg), int(0 * brg), int(0 * brg))
pixels.write()
sleep(delaytime)
def green():
global i, numberleds, delaytime
for i in range(numberleds):
pixels[i] = (int(0 * brg), int(0 * brg), int(255 * brg))
pixels.write()
sleep(delaytime)
def blue():
global i, numberleds, delaytime
for i in range(numberleds):
pixels[i] = (int(0 * brg), int(255 * brg), int(0 * brg))
pixels.write()
sleep(delaytime)
def white():
global i, numberleds, delaytime
for i in range(numberleds):
pixels[i] = (int(255 * brg), int(255 * brg), int(255 * brg))
pixels.write()
sleep(delaytime)
def OttoNeo(index):
global brg
colors = [(255, 0, 0), (255, 128, 0), (255, 255, 0), (128, 255, 0), (0, 255, 0), (0, 255, 128), (0, 255, 255), (0, 128, 255), (0, 0, 255), (127, 0, 255), (255, 0, 255), (255, 0, 127)]
color = colors[index % len(colors)]
for i in range(13):
pixels[i] = (int(color[0] * brg), int(color[1] * brg), int(color[2] * brg))
pixels.write()
def measure_distance():
io_pin = machine.Pin(19, machine.Pin.OUT)
io_pin.off()
utime.sleep_us(2)
io_pin.on()
utime.sleep_us(20)
io_pin.off()
io_pin = machine.Pin(19, machine.Pin.IN)
pulse_duration = machine.time_pulse_us(io_pin, 1)
distance = 0
if ((pulse_duration < 60000) and (pulse_duration > 1)):
distance = pulse_duration / 22.8;
return distance
def redUS():
global delaytime, i
for i in range(6):
ultrasonicRGB[i] = (int(255 * brg), int(0 * brg), int(0 * brg))
ultrasonicRGB.write()
sleep(delaytime)
def greenUS():
global delaytime, i
for i in range(6):
ultrasonicRGB[i] = (int(0 * brg), int(255 * brg), int(0 * brg))
ultrasonicRGB.write()
sleep(delaytime)
def blueUS():
global delaytime, i
for i in range(6):
ultrasonicRGB[i] = (int(0 * brg), int(0 * brg), int(255 * brg))
ultrasonicRGB.write()
sleep(delaytime)
ultrasonicRGB[0] = (0, 0, 255)
ultrasonicRGB[1] = (0, 0, 255)
ultrasonicRGB[2] = (0, 0, 255)
ultrasonicRGB[3] = (0, 0, 255)
ultrasonicRGB[4] = (0, 0, 255)
ultrasonicRGB[5] = (0, 0, 255)
ultrasonicRGB.write()
print("Otto is alive!")
builtinled.on()
buzzer.duty(512)
buzzer.freq(261)
sleep(0.125)
buzzer.freq(293)
sleep(0.125)
buzzer.freq(329)
sleep(0.125)
buzzer.freq(349)
sleep(0.125)
buzzer.freq(392)
sleep(0.125)
buzzer.freq(440)
sleep(0.125)
buzzer.freq(493)
sleep(0.125)
buzzer.freq(523)
sleep(0.125)
buzzer.duty(0)
red()
redUS()
green()
greenUS()
blue()
blueUS()
white()
pixels[0] = (int(255 * brg), int(1 * brg), int(1 * brg))
pixels[1] = (int(255 * brg), int(128 * brg), int(0 * brg))
pixels[2] = (int(255 * brg), int(255 * brg), int(0 * brg))
pixels[3] = (int(128 * brg), int(255 * brg), int(0 * brg))
pixels[4] = (int(0 * brg), int(255 * brg), int(0 * brg))
pixels[5] = (int(0 * brg), int(255 * brg), int(128 * brg))
pixels[6] = (int(0 * brg), int(255 * brg), int(255 * brg))
pixels[7] = (int(0 * brg), int(128 * brg), int(255 * brg))
pixels[8] = (int(0 * brg), int(0 * brg), int(255 * brg))
pixels[9] = (int(127 * brg), int(0 * brg), int(255 * brg))
pixels[10] = (int(255 * brg), int(0 * brg), int(255 * brg))
pixels[11] = (int(255 * brg), int(0 * brg), int(127 * brg))
pixels[12] = (int(255 * brg), int(255 * brg), int(255 * brg))
pixels.write()
color_index = 1
while True:
analogL_value=analogL.read() #reading analog pin
analogR_value=analogR.read() #reading analog pin
distance = measure_distance()
print("Left analog sensor:",analogL_value,"Right analog sensor:",analogR_value, "Distance:", measure_distance())
print("Left digital sensor:",digitalL.value(),"Right digital sensor:",digitalR.value())
print("Measured Distance:", distance)
if (measure_distance()) < (10):
print("Distance is less than 10, setting to red.")
ultrasonicRGB[0] = (255, 0, 0)
ultrasonicRGB[1] = (255, 0, 0)
ultrasonicRGB[2] = (255, 0, 0)
ultrasonicRGB[3] = (255, 0, 0)
ultrasonicRGB[4] = (255, 0, 0)
ultrasonicRGB[5] = (255, 0, 0)
ultrasonicRGB.write()
for count in range(13):
pixels[count] = int(255 * brg), int(0 * brg), int(0 * brg)
pixels.write()
rightServo.duty(115)
leftServo.duty(45)
sleep(1)
rightServo.duty(0)
leftServo.duty(0)
rightServo.duty(45)
leftServo.duty(45)
sleep(0.4)
rightServo.duty(0)
leftServo.duty(0)
else:
print("Distance is greater than or equal to 10, setting to green.")
OttoNeo(color_index)
color_index += 1
if color_index >= 12:
color_index = 0
ultrasonicRGB[0] = (51, 255, 51)
ultrasonicRGB[1] = (51, 255, 51)
ultrasonicRGB[2] = (51, 255, 51)
ultrasonicRGB[3] = (51, 255, 51)
ultrasonicRGB[4] = (51, 255, 51)
ultrasonicRGB[5] = (51, 255, 51)
ultrasonicRGB.write()
for count in range(13):
pixels[count] = int(0 * brg), int(255 * brg), int(0 * brg)
pixels.write()
rightServo.duty(45)
leftServo.duty(115)











_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)








{kind=link}
Comments