



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
To design this car was started by an inspiration that why we don't make good use of the smart phone to control a smart car as we use mobile phone more and more time? The app of smart phone is dead because you can only see it on the screen but not in the real space. However, we find that we can easily use the usual thing in life to design something unusuall.
Step 1:set up the HC-06:Set up the HC-06 through the Arduino. Firstly download the code in Arduino. Then download the code in HC-06 to set up it. Serial.begin(9600);This code is to
set baud rate.
Serial.println("AT");
Serial.println("AT+NAME=smart car"); This is to confirm its name.
Serial.println("AT+ROLE=S"); This is to confirm its model that is salve.
Serial.println("AT+PIN=1234"); Set up its password.
Serial.println("AT+BAUD=9600"); This code is to set baud rate.
Serial.println("AT+RMAAD"); Clear pairing list.
Step 2: assemble the car's chassisAssemble the car's chassis.
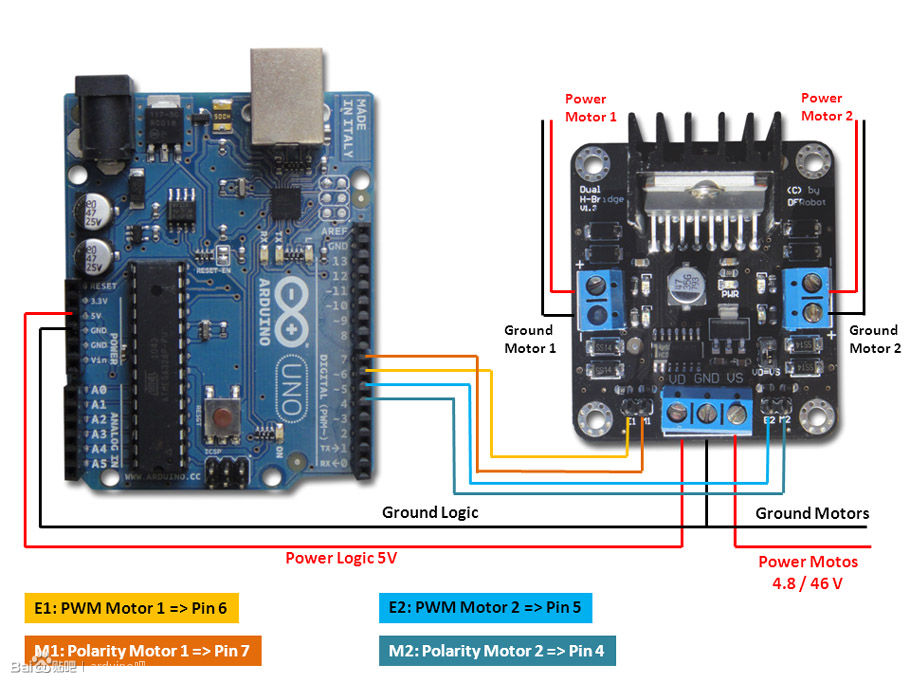
Step 3:connect each part with wiresConnect each part by dupont lines. You can refer to the following diagram.
(The diagram is from another website.)
HC-06
L298
Step 4:Store the code in ArduinoStore the code 2 in Arduino.Then you can input different number using the smart phone to control the car. Then L298 is powered by 12V. And can control two motors by four pins. You cna contorl the high and low of two pins to deside the forward rotation or backward rotation of the motor.
Step5: The appDownload the Bluetooth SPP in the smart phone. Then connect it to HC-06. Then you can easily control the car by input 1-9 to deside different situation of the car.

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.