


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 4 | |||
 |
| × | 2 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
ThingSpeak Channel Results:
https://thingspeak.com/channels/2164647
To view live results (if my RSS box is active) use link above. If there are large gaps in data that is because the X-Axis is by date/time and a large gap may mean I have turned the box off and restarted it. Otherwise data is recorded. Results can be viewed on a mobile app called ThingView Free on the playstore using your or my channel ID depending on if you decide to replicate the project!
Sample of a Couple Channels:
Summary:
The Remote Sensing Station (RSS) is my first entry to Hackster.io! The environment sensing kit by DFRobot lends itself to remote sensing and thus RSS. I have already used mine for several purposes to understand how much sunlight and UV different areas of my yard see so I can optimally place certain plants for growing. It is also useful for understanding the quality of air because of the SGP40 using its Volatile Organic Compounds (VOC) Index.
Basic Concept:
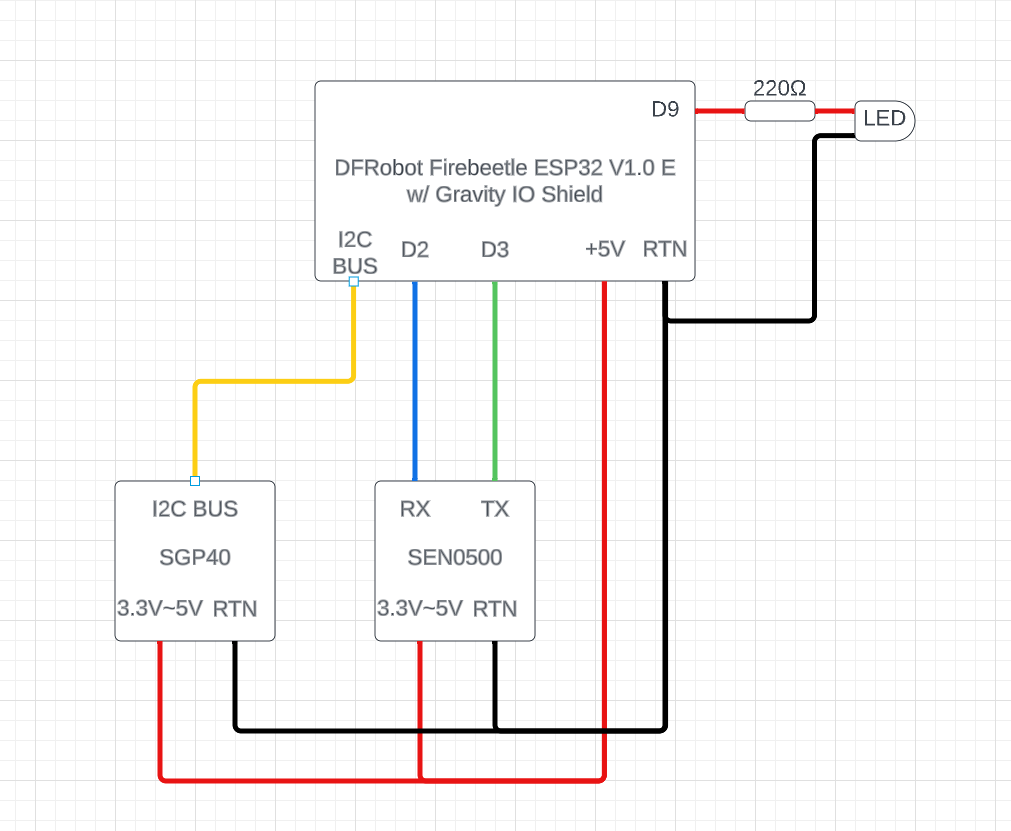
RSS is a Wi-Fi based data collection system. It collects data from a suite of sensors including temperature, humidity, ultraviolet intensity, luminous intensity, atmospheric pressure, altitude, moisture, and volatile organic compounds. RSS publishes the data collected to thingspeak.com using specific channel identification number. Each channel can handle up to 8 data streams with a free account total of 3, 000, 000 messages per year. The script by default will publish all 8 channels at the same time every 100 seconds.
Notes About The Code:
Libraries needed:
#include <Wire.h>
#include <DFRobot_SGP40.h>
#include <DFRobot_EnvironmentalSensor.h>
#include <WiFi.h>
#include <ThingSpeak.h>
IMPORTANT: you will need to create a file called “secrets.h” with two variables called: SECRET_SSID and SECRET_PASS and set them equal to your network SSID and Password respectively. You will place this file into the same folder that you put your sketch in and include it with quotation marks. The latter is done in the code already so you will just have to create the header file.
Things to improve:
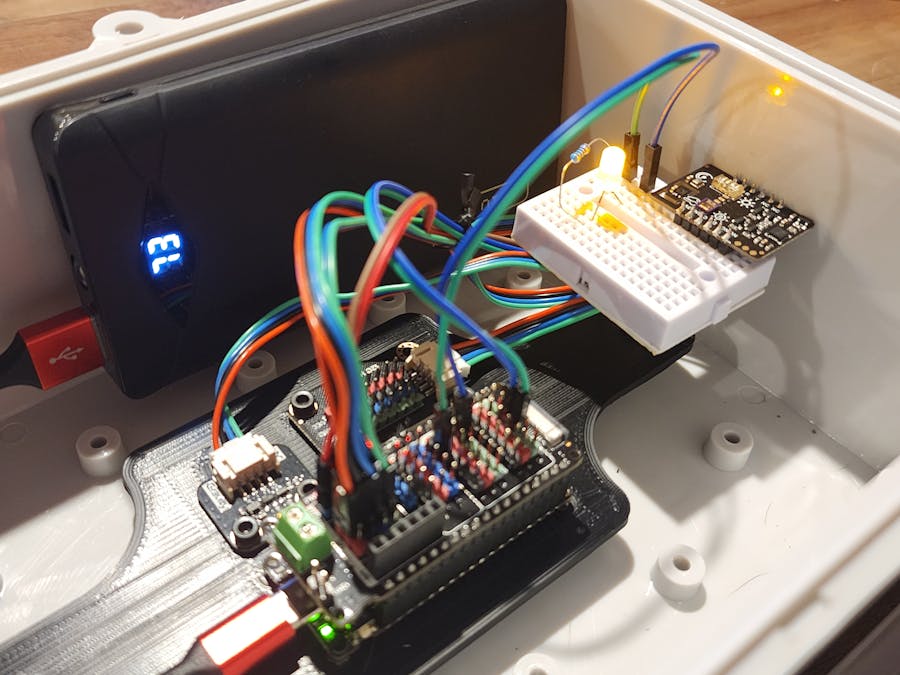
Given more time between work and school I would have created two nodes, one for data collection equipped with a radio such as the NRF24L01 or LORA boards, and a second base station node such as the ESP32 so that a remote sensor equipped with radio can communicate back to a base station and the ESP32 base station can publish the data from the remote RF node to the internet for ease of access. The other aspect of the project I would improve is the mounting of the LED and current limiting resistor, SEN0500 sensor breakout board, and the SGP40 VOC sensor. The optimal way to mount the VOC sensor would be to cutout just enough of the lid so that the VOC sensor can be exposed to the air while the lid stays shut: the current configuration the lid must stay open to get useful VOC index. The SEN0500 could also have better mounting in that it also would be partially exposed via cutout in the lid. Reason being is that the SEN0500 otherwise would read a less useful data due to it being in a box. For this project I just mounted it to the bread board with no other connections other than the cable going to the UART pins.
Helpful Figures:
SGP40 VOC Index:
DFRobot Pinout:







{kind=link}
Comments
Please log in or sign up to comment.