



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 4 | |||
| × | 4 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Bidex is a low-cost human-safe robot Made of acrylic and it's capable of using AI to learn basic tasks.
It’s a robot arm that combines traits of human-arms and human-robot.
The arm uses innovative servo motors-driven mechanisms that make any interaction with humans safe at just 2.6 kilograms it weighs.
The robot has a wide range of applications from simple carrying to performing complex tasks that require precise manipulation characteristics and strengths of real.
Step 1: Design and MaterialThe robot was designed by Sketch Up 2017 Pro on an actual side scale of 1:1.
then I print it out using a laser cut machine on an acrylic board of 3mm thickness.
Actually, that wasn't easy to maximizing the DOF using four servo motors only, and at the same time, I had to maintain the human form for the robot.
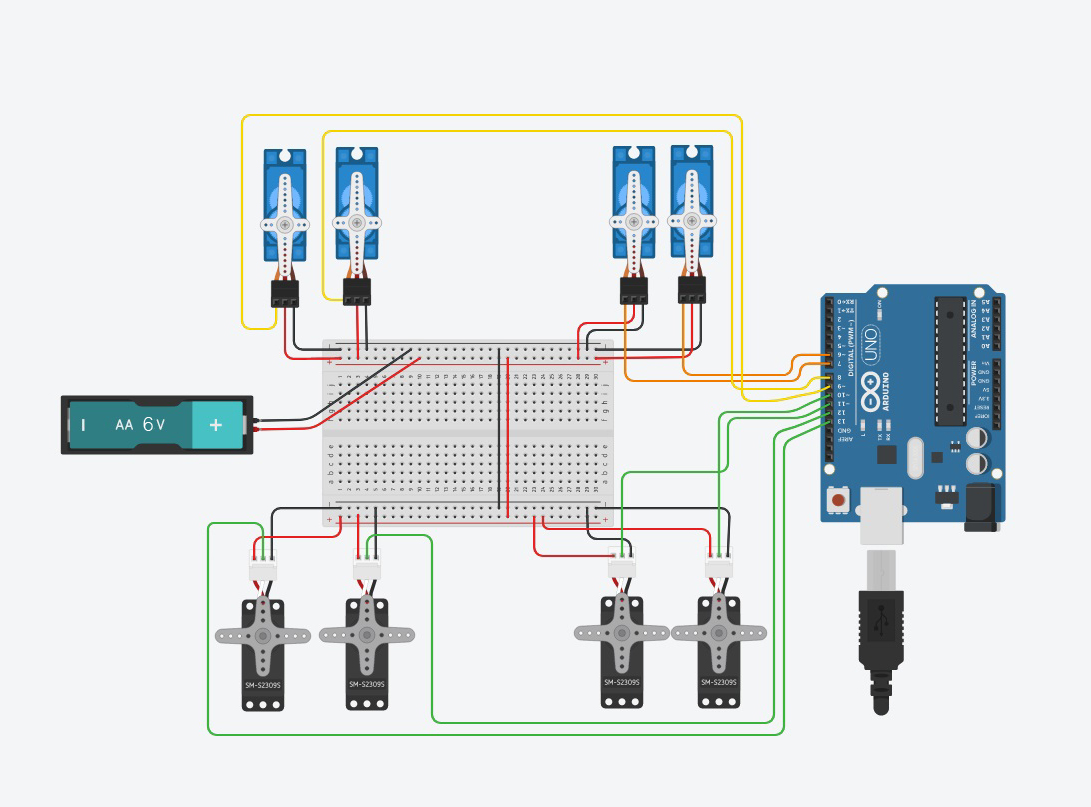
Step 2: Circuit
I was keen to design the gripper consistent with the rest of the design and to be as humane as possible.
and It consists of Three groups of parts Thumb, palm, and fingers connected together using 5mm plastic spacers as shown.
Tip1:using plastic spacers are very effective to reduce the weight and thus increasing the torque of the motor.
* The gripper design is available to download
Step 4: Elbow and Arm
The design of the wrist motion is based on the servo motor that connects the forearm to the hand.
And Basically, The torso was designed to contain electronic components such as Arduino Board and the motor shield.
{kind=link}

Comments
Please log in or sign up to comment.