


Hardware components | ||||||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 5 | |||
 |
| × | 5 | |||
 |
| × | 3 | |||
| × | 3 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
The world is facing a great pandemic i.e. The covid-19 Virus. Detecting this virus is becoming a great deal. And protecting the people from this virus is also a big deal. Now consider a hospital, I came to know that many of the doctors and other medical workers are getting affected by this disease while taking care of the patients. So to solve this issue, I have come up with an idea of using voice controlled robot in the hospitals to protect the spread of disease from patients to doctors. Usage voice controlled robots can reduce the contact between the doctor and the patient, thus the spread of disease can be controlled. Also the bot can measure the temperature of a person using the contact less IR temperature sensor and if the temperature is found to be high, it alerts the doctor and sends the data to the Doctor.
Problem:
Now the world is facing a great issue i.e COVID19 virus.Doctors are struggling with the virus though the spread can't be controlled.Also doctors are being affected and losing their precious life.We need a solution to protect the doctors as well as the spread of virus from the one person to other.
Idea and "Iris":
I've made a raspberry pi based robot named "IRIS" to solve the problem. Iris is a bot that has rover and robo arm. So the design is a combination of rover and a robo arm.Raspberry pi is acting as the brain of the robot. The bot can be controlled remotely using voice and through mobile phones.I found robots are rarely employed in hospitals since controlling it manually is a big deal.To make it easier, I'm planning to control the bot through voice, so that the patient as well as the doctors can use the bot to help them like a assistant. Employment of robots is necessary, since in this abnormal situation patients and doctors cannot always depend upon a person for assistance. So, to prevent the spread and to protect the lives, employment of such robots will be helpful to fight against the COVID-19.
Why LoRa?Communication the most important component of an IoT project. The ability of a thing to communicate with other “things” (a device cloud/server) is what gives the “thing” the right to attach the “internet” to its name. While tons of communication protocols exist, each of them lacks one thing or the other which made them “not totally suitable” for IoT applications. The Major problems being power consumption, range/coverage and bandwidth.
LoRa (which stands for Long Range) is a patented wireless communication technology which combines ultra-low power consumption with an effective long range. While range highly depends on the environment and possible obstructions, LoRa typically has a range between 13- 15Km, which means a single LoRa gateway can provide coverage for an entire city, and with a couple more, a whole country. The technology was developed by Cycleo in France and came to fore when the company was acquired by Semtech in 2012.
Features of LoRa:
A LoRa radio comprise of a few features which help it achieve long-range effective power and Low cost. Some of these features include;
- Modulation Technique
- Frequency
- Adaptive Data Rates
- Adaptive Power Levels
First of all, I wanna thank Arm, Helium, Semtech, STMicroelectronics and Hackster.io for awarding me the Helium Developer Kit.
The Helium Developer Kit consists of:
- B-L0772Z-LRWAN1 Discovry Kit
- X-NUCLEO-IKS01A3 MEMS Shield
- Micro USB Cable and
- A Getting Started Card
Refer these links before starting to work with the kit:
Download the code for lora board from my Github link provided below. Upload the code to the board and Finally, connect the Discovery Lora Kit to the bot Raspberry pi's USB Port.
Helium Hotspot:
A Hotspot is an important component when coming to lora concept. Consider you have lots of data like temperature,humidity etc,. of your house and you wanna monitor it from anywhere in the world. For that,the data is to be stored or located in the cloud inorder to make it accessible by you. The hotspot will collect the data from the sensor in the lora node and send that data packets to the hotspot. The hotspot further process the data and send it to the cloud.
Here, the hotspot will be the Helium Hotspot and the cloud will be the Helium Network which has a console to work and integrate the node's data to the user device.
If you don't have a hotspot consider buying one from here or consider building your own using this.
In this project, our lora node will be a robot with robo arm and various sensors and actuators. The Hotspot will be Helium Hotspot and Using Helium Network's Console we'll be integrating our data to the user using MQTT.
Since I don't have a Helium hotspot and unable to build my own hotspot due to some reasons, this project is developed with some considerations and assumptions. And assuming that i have a Helium hotspot. So If you have any doubts, feel free to contact me.Robo Arm:
The above picture shows the unassembled parts of the robo arm with 4 DOF. You can use any robo arm kit or make your own customized build. And the arm looks like this after the build or assembly.
The above picture shows the unassembled parts of the Base with 2 DOF. You can use any base chasis kit or make your own customized build. And the base chasis looks like this after the build or assembly. I'm just using two wheels, for simple operation.
Now, It's time to connect the robo arm and the base. And after connecting the things, the bot will look like this.
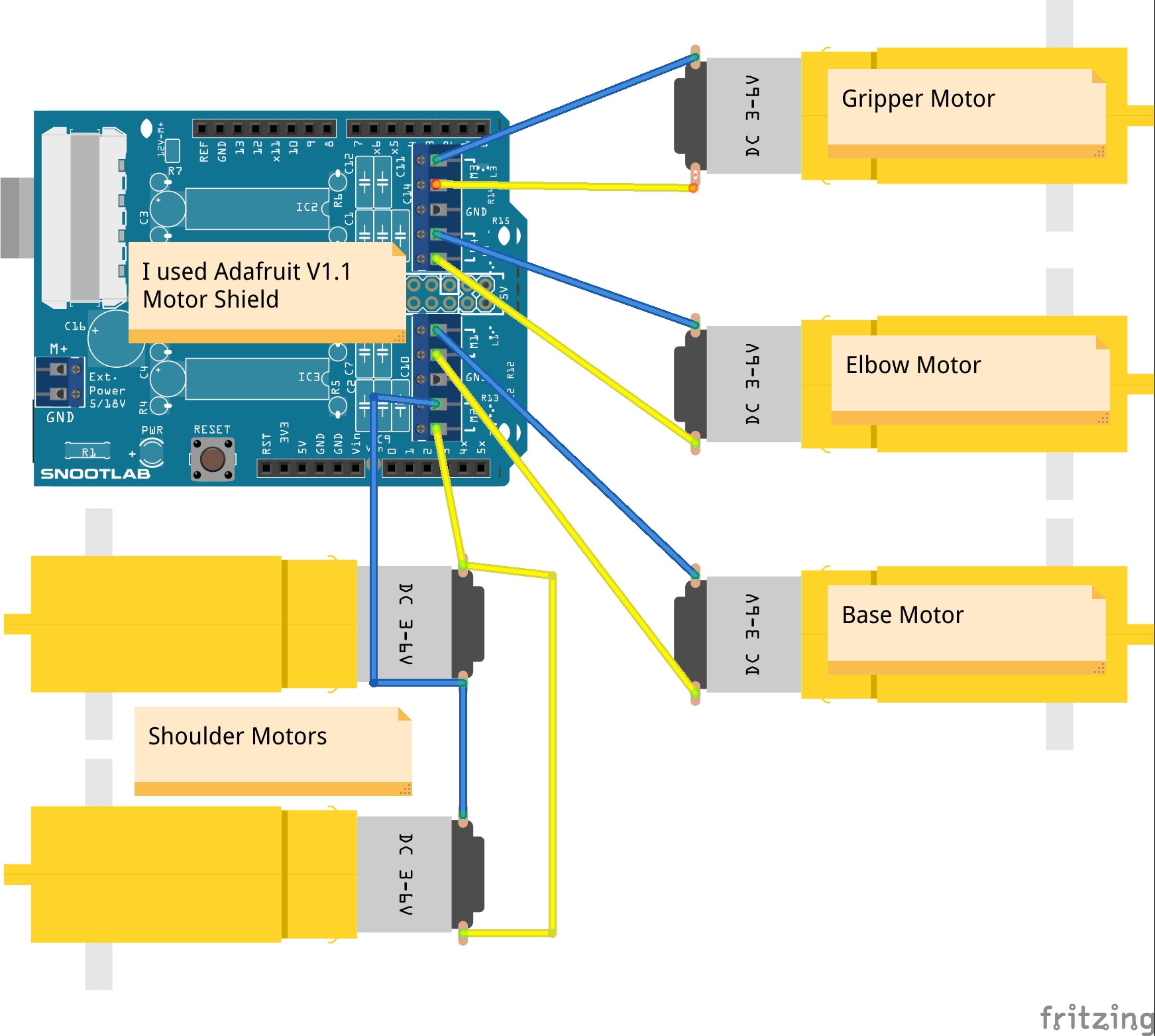
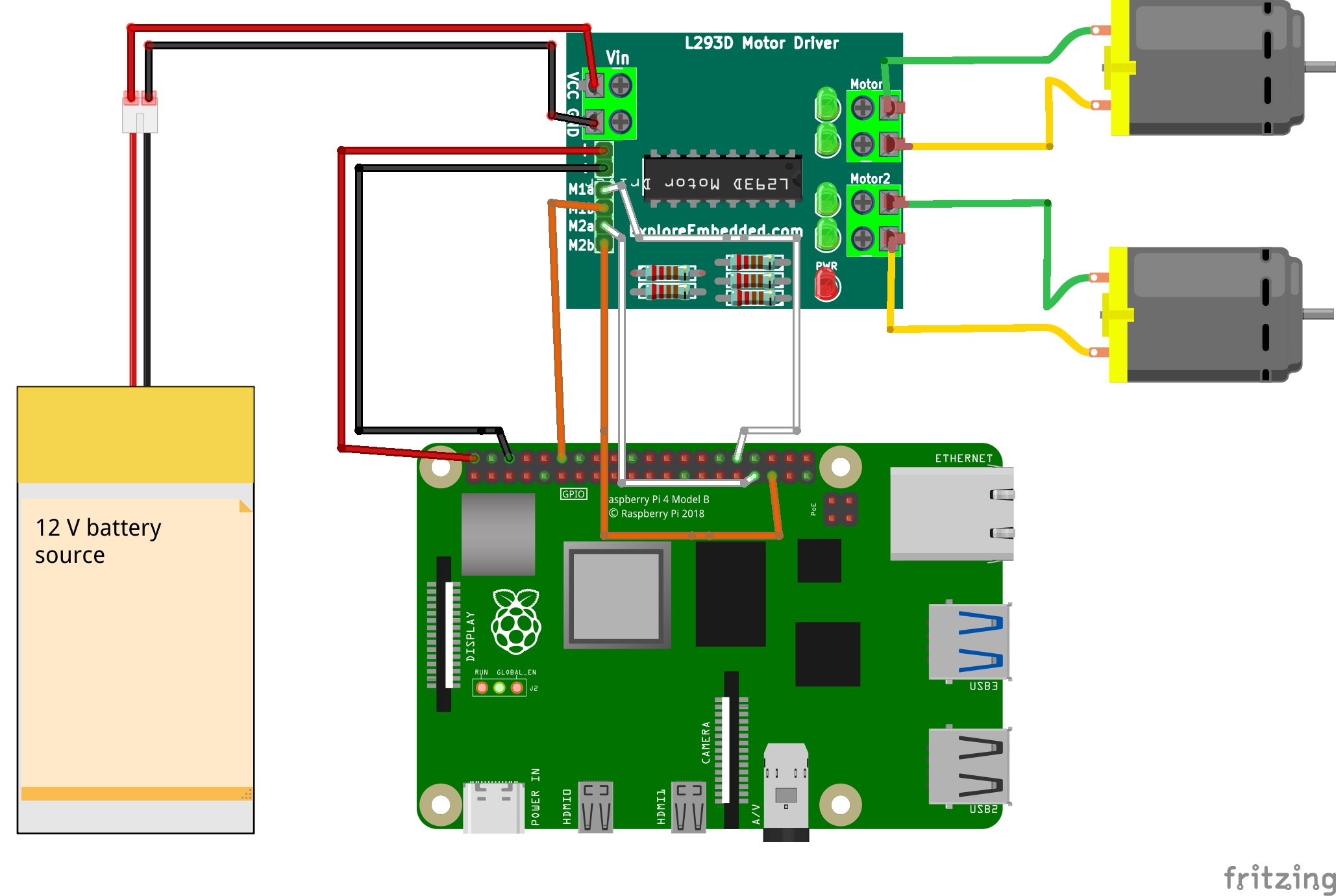
I've used two motor drivers, one is for the base motors and the other is for the robo arm motors. The driver images are shown below.
Here I've used motor driver shield version 1. Any motor driver can be used based on the custom design of robot.
Since I'm implementing my idea into a realtime application I'm using small and miniature parts to build the bot. When manufacturing it for real time use in hospitals, we can use efficient motors and designs. And don't forget to connect the Arduino UNO to the USB port of Raspberry Pi.
Since I'm implementing my idea into a realtime application I'm using small and miniature parts to build the bot. When manufacturing it for real time use in hospitals, we can use efficient motors and designs. And don't forget to connect the Arduino uno to the USB port of Raspberry Pi.Simple Casing for Pi:
I'm just using a simple casing like structure built using acrylic sheets to place the Raspberry Pi in the bot. And using some studs to fix it in a place. The casing looks like this:
And after fixing it to the bot, the bot looks like this:
The circuit connections are made, the connections are made available in the post. The Arduino Uno with motor shield is placed under the yellow sheet that you can see in the above image.
MLX90614 IR Temperature Sensor:I'm using a contactless IR temperature sensor to measure the temperature of the person inside the hospital and person entering into the hospital. The temperature sensor looks like this:
I'm gonna fix this temperature sensor in a stick. So that the sensor will be at a maximum height to read the temperature of the human. Since I'm just making a mini prototype I'm using an extender to hold the IR sensor and the MLX90614 sensor. The IR sensor is used to detect the presence of human to measure the person's temperature. The design can be customized when designing a bigger robot. And the final arrangement looks like this:
When coming to the brain of the robot, using an embedded linux platforms are the best. I'm using the Raspberry Pi 4. And the Boards look like this:
Setting up the hardware can be found here:
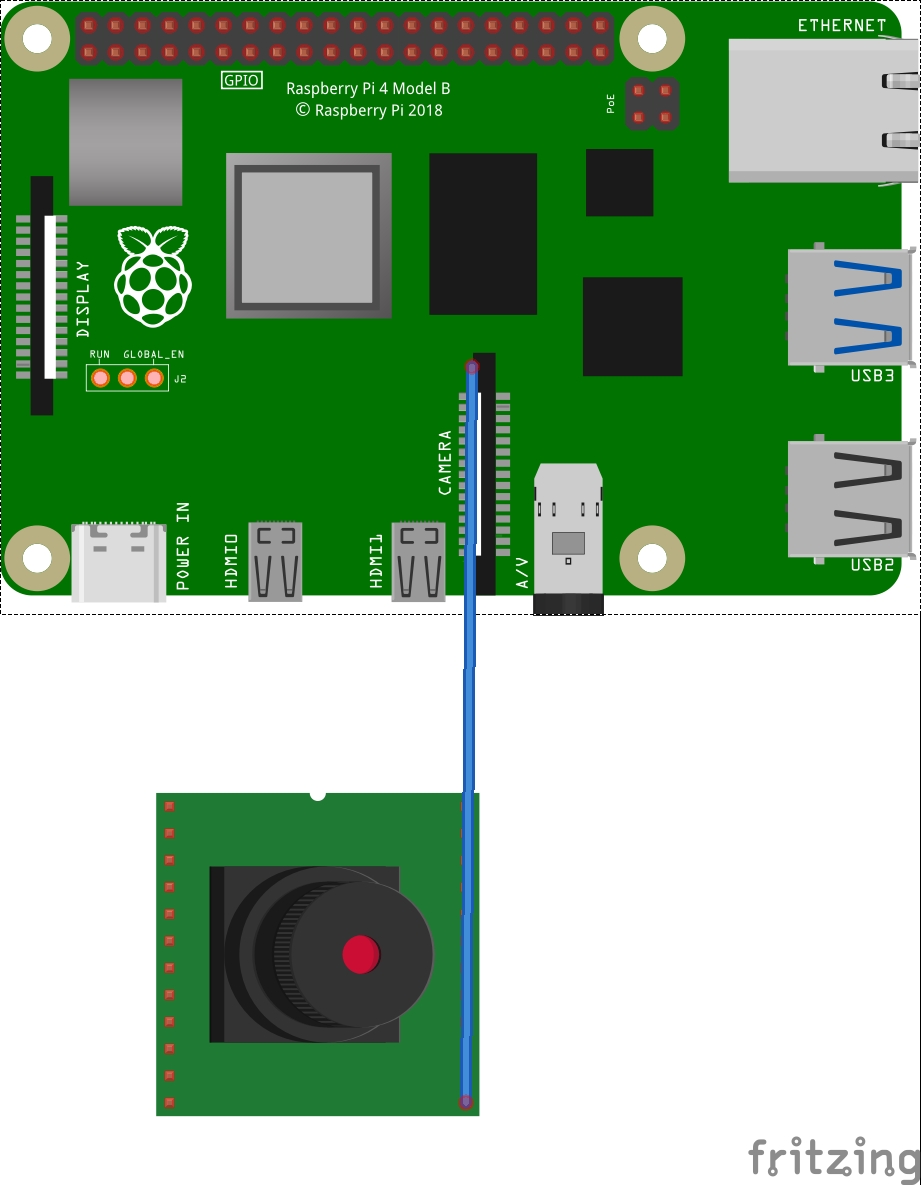
Pi Camera Module:Next, we're gonna take a look at the pi camera module. PI camera is used here for monitoring the patient. The video will be live streamed to the smartphone. I'm using v1.3. But advanced version also suits well.
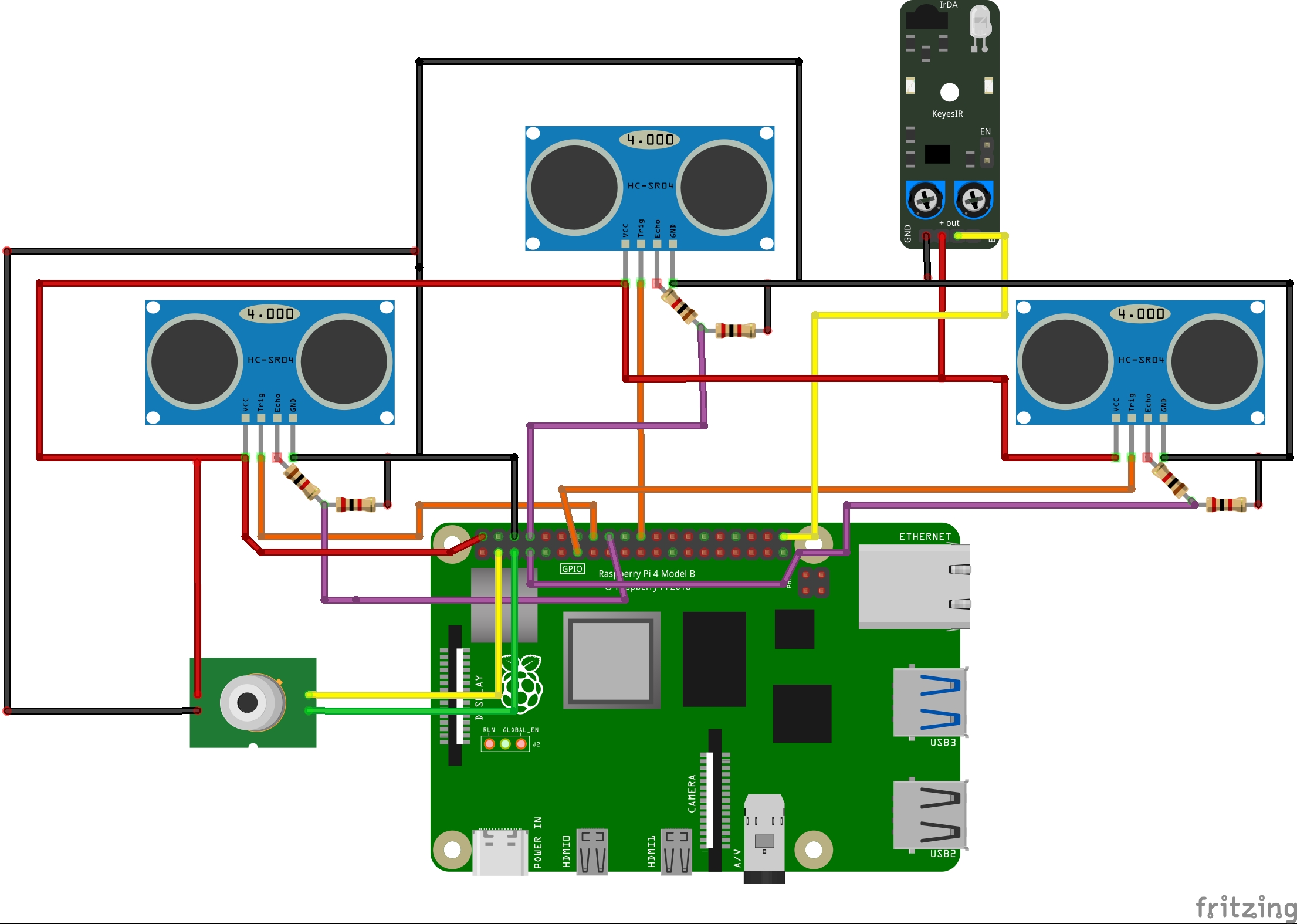
Ultrasonic Sonic sensors are used for obstacle avoidance of bot. Here I'm using 3 ultrasonic sensor for the obstacle avoidance. We can also use rplidar for SLAM and obstacle avoidance while building a bigger advanced bot. Since this is a miniature bot I'm using Ultrasonic sensors. The sensor looks like this:
I'm using three ultra sonic sensors. Front sensor, Left sensor, Right sensor. These sensors are responsible for obstacle avoidance of the bot.
Wemos Mega:Wemos Mega will be used for integrating voice controlled automation with the bot. Wemos Mega is Arduino Mega compatible board plus additional ESP8266 with 32Mb Flash. It allows flexible configurations for connections between ATmega2560, ESP8266 and USB serial. Arduino sketches can be uploaded to ATmega2560 or ESP8266 via USB separately and they can either work together to form a system or independently. The configurations are set by the onboard DIP switches.
The things we need to know before starting to work with this board is DIP switch configuration. Refer the below picture:
An additional switch configures to which serial port (Serial0 or Serial3) the ESP8266 is to be connected. It is possible to connect USB to RX0/TX0 of ATmega2560 and ESP8266 connects to RX3/TX3 of ATmega2560 at the same time, as following:
While uploading the esp8266 code, DIP switches-5, 6, 7 should be kept ON and UART switch is to be kept at RXD0-TXD0.
While uploading the esp8266 code, DIP switches-5, 6, 7 should be kept ON and UART switch is to be kept at RXD0-TXD0.
While uploading the Mega 2560 code, DIP Switches 1, 2, 3, 4 should be kept ON and the UART switch is to be kept at RXD3-TXD3
While uploading the Mega 2560 code, DIP Switches 1, 2, 3, 4 should be kept ON and the UART switch is to be kept at RXD3-TXD3
The eighth DIP is NC pin, so it need not be considered.
After successfully uploading both the codes, proceed ahead.
After Completing the above procedures we need to install the packages and python libraries for our bot.
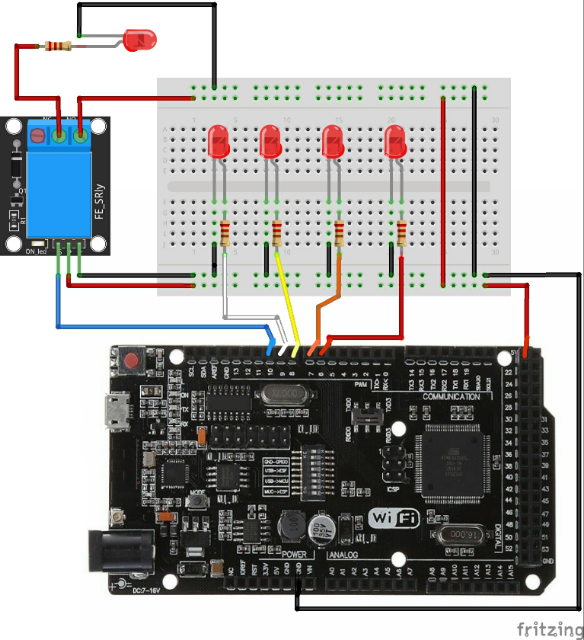
Final Hardware Setup:All connections should be made according to the schematics provided. Don't forget to refer the schematic section before wiring the bot! I'm using DC adapter as power source. A battery can be used as power source while customizing the bot.
All connections should be made according to the schematics provided. Don't forget to refer the schematic section before wiring the bot! I'm using DC adapter as power source since i don't have battery. A battery can be used as power source while customizing the bot.
After assembling the entire hardware, the bot will look like this:
Now let's start working on the software setup.
Software Setup:Setting up the helium account:Before starting to proceed with the software setup, make sure you have a Helium account,and have added a device in the console. This Getting Started guide will help you to setup the Helium console.
The console page looks like the one shown below:
Make sure you've logged in your account and then click the Devices on the top left corner(devices page is shown below) and then click Add New Device to add your device.
After sucessfully adding a new device, copy the Device EUI, App EUI and App Key and paste it in the arduino code before uploading the code to the lora board.
Now,before starting to install the required packages and libraries, enter sudo raspi-config in the terminal and in the interfacing options enable VNC, I2C, Serial Console, Camera etc,.
And the python libraries used here are:
- speechrecognition
- paho mqtt
- snowboy
- pyaudio
- bluepy
- Rpi GPIO
- Flask etc,.
The requirements.txt file can be used to install all the necessary packages required for the operation of robot. Before that, Don't forget to create Python3 virtual environment. The Virtual environment can be created by using the following command:
python3 -m venv <your env> #replace <your env> with your desired nameAfter creating the venv (I named it as Iris),we have to install certain linux packages inorder to make the system to work properly. So execute the commands in terminal as follows:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install gfortran
sudo apt-get install libhdf5-dev libc-ares-dev libeigen3-dev
sudo apt-get install libatlas-base-dev libopenblas-dev libblas-dev
sudo apt-get install liblapack-dev cython
sudo apt-get install libportaudio2 portaudio19-dev
sudo apt-get install python3-pyaudio sox
sudo apt-get install pulseaudio
sudo apt-get install libasound2-dev libportaudio-dev
sudo apt-get install libportaudio0 libportaudiocpp0
sudo apt install -y mosquitto mosquitto-clients
sudo systemctl enable mosquitto.serviceNow, We're gonna install the required packages using the requirements.txt file. The file should be executed as mentioned below inorder to install the necessary packages. The command is:
pip3 install -r requirements.txt #Don't forget to use "-r"Now execute the following commands in terminal and note down the "card number" and "device number" for mic and speaker respectively.
arecord -lThe above command will show you the list of input devices, note down the card and device number of the usb mic. Then execute this:
aplay -lThis command will show you a list of playback devices. Normally "hw:0, 0" for HDMI. For now it is ok to use the HDMI port since we will be using the speaker in the future development of bot.
After executing the above commands, We're gonna create a file to make the pi to communicate with the usb mic. Execute the command in the terminal:
nano ~/.asoundrcAnd then copy and paste this into the terminal,
pcm.!default {
type asym
capture.pcm "mic"
playback.pcm "speaker"
}
pcm.mic {
type plug
slave {
pcm "hw:<card number>,<device number>"
}
}
pcm.speaker {
type plug
slave {
pcm "hw:<card number>,<device number>"
}
}Change the <card number>,<device number> according to the number found at the above step. After changing, press Ctrl + x and Shift + y and press Enter.
Setting up the Camera module:
Connect the raspberry pi camera properly to the Raspberry pi board. And make sure the board is off when connecting the camera to CSI port. Connecting the camera while the board is on can cause the camera to get damaged.
Connect the raspberry pi camera properly to the Raspberry pi board. And make sure the board is off when connecting the camera to CSI port. Connecting the camera while the board is on can cause the camera to get damaged.
Make sure the camera is enabled using the Sudo raspi-config Command.
Check whether the camera is detected by using the command:
vcgencmd get_cameraIf detected successfully. Execute this command in terminal:
raspistill -o cam.jpgIf an image is generated successfully. Great! We're all set!
DON'T FORGET TO CLONE THE GITHUB REPOSITORY BEFORE PROCEEDING ALL THE STEPS!Running the Scripts:
Start by rebooting the board using the command:
sudo rebootThen activate your virtual environment using
source <your venv>/bin/activateNow, run the script
python Iris_bot.py resources/Iris.pmdlAnd in another tab start the server by executing
python Iris_server.pyAfter the execution of the script starts, go to your browser and type the URL in the format:
<PI's IP ADDRESS>:8000 #8000 is portHere we go! You can see Iris Dashboard ! now we can see the bot in action! You can add the execution command on system's bash file to run the scripts automatically at the next boot.
Bot Working (Without lora board):
Conclusion:Since I don't have a lora gateway, I'm unable to deploy the lora feature completely in my project. I'm planning to build my own gateway in the future. Once I finish building my gateway I'll deploy the lora feature in the bot completely and update the project. Acutally I planned to use lora feature to control the bot using MQTT through our smartphone. Soon I'll make an update. Sorry for the inconvenience.
Finally I wanna thank Arm, Helium, Semtech and STMicroelectronics for this awesome "Helium #IoTforGood" contest.
Hope you all found this write up useful. I made this project on keeping every Doctors who are sacrificing their lives and happiness for us. Let's fight this covid19 together and let's make a better world. I'm planning to deploy autonomous navigation and some other special features in the bot. So,stay tuned! And Don't forget to share this !
Let's Stay Home Stay Safe! Thank You!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.