



Hardware components | ||||||
 |
| × | 1 | |||
_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
According to the 2017 Infrastructure Report Card published by the American Society of Civil Engineers (ASCE), almost 40 percent of the 614, 387 bridges in the United States are at least a half century old. Almost 10 percent were structurally deficient in 2016. On average, 188 million vehicles cross structurally deficient bridges each day. People who manage them are constantly looking for more cost-effective ways to keep them in good repair.
Perhaps the biggest issue affecting people who maintain bridges today is that they are forced into being reactive in how they approach their work, rather than proactive. They must repair the worst damage to structures rather than use limited resources to keep them in good shape. As with most things, being reactive is never as effective as planning ahead.
A “worst first” approach is not a cost-effective way to keep bridges healthy. It evolves into a vicious cycle where more and more budget dollars go toward emergency repairs. This under-funds proactive maintenance projects that could keep bridges out of the deficient category entirely.
According to ASCE, the current cost to rehabilitate the nation’s bridges is more than $120 billion. As with most things earthquakes and other disasters also can suddenly pass and if there's not a precise monitoring, issues could be fatal.
And well, this is a very personal problem. On September the 7th of 2017 there was an earthquake in Mexico City. At about 8.1 in the Richter scale it caused structural damage to several buildings around the city and a couple pedestrian bridges in the my University. This was the
With better monitoring and alert systems we could have probably spotted on these failures and prevented the crisis, or maybe acted on it faster.
The main problematic is the little monitoring that bridges have, and the structural damage that they can have over time. As well as the lack of preventive maintenance, as it can prevent a partial or total failure.
The main issues that cause a bridge to fail and fall are:
- Infrastructure failure.
- Structrural collapse
- Lack of good maintainance
- Wear and Tear
- Floods.
- Unexpected events
- A combination of issues.
If we could notice damage in the structure beforehand this would cut costs of maintenance and also prevent any disaster, therefore that is the focus of our solution.
Other forms of predictive solutions in bridges do not provide accurate data, or require a technician to go directly to the place to check manually.
SolutionOur solution is to place a pair of vibration sensors (accelerometers or IMU's) strategically in bridges to perform continuous monitoring. And through AI and Machine Learning at the edge we will generate predictive models for the wear and tear of the bridge, and recommendations to the user to schedule preventive maintenance. We will use these algorithms and then accelerate them via the potent FPGA on top of the Ultra96 for maximum performance.
Current bridge monitoring systems are exclusively for sensor monitoring and information deployment to the user, most of the time they have to go to the bridge directly and check on the displays the information that the sensors provide. In the case of bridges the engineer in charge and if these systems have some processing in the Cloud, it is only for the aesthetic deployment of the information of the sensors, but this is very rare and not a common occurrence.
Some examples are these companies:
- https://www.campbellsci.com/structural-health-monitoring
- http://alliancesensors.com/bridge-monitoring-systems
Flowchart:
Several Universities are already performing this type of census in structures using strain gauges such as: http://livinglabs.curtin.edu.au/#/, this shows us that structural sensing is indispensable for Industry 4.0.
Ultra96 Setup:1. The most important part, for this solution, will be the use of the Ultra96 which is Xilinx and 96 boards' latest board. In this project we will take maximum advantage of the board in addition to its linux operating system, to perform hardware acceleration by creating hardware modules on the Ultra96's FPGA.
1.1. Download the operating system for the Ultra96: The operating system that comes by default in the SD card of the Ultra96 is PetaLinux. It caused many problems for us due to its inability to install packages using the "apt-get" command. The command was essential for the correct installation of some packages that we would be using later, therefore we settled in using another operating system that Xilinx offers from its official sources: Pynq. And here it is:
1.2. Flashing the operating system on an SD card. To Flash the operating system in the SD card, we recommend a minimum size of SD of 16 GB. We recommend the following software which works in any operating system, but you can use your preferred one:
- Link: https://www.balena.io/etcher/
- Remember that before Flashing the operating system, you have to format the SD.
1.3. Once the operating system is flashed, place the SD card in the correct slot of the Ultra96, connect a microUSB cable to a laptop, the power cable, and press the power button as shown in the following diagram.
- Remember that the minimum power the card needs to operate is 12 Volts at 2 A. We used the Qualcomm's Dragonboard Power source.
1.4. If Flashing the operating system and the power supply have worked, the board will turn on as follows.
The correct boot.
1.5. Once we have connected the card, we will notice that the connected memory will appear on our connected USB devices.
- The Ultra96 creates an Ethernet PCI connection, when we see that USB memory appears on the tab we are ready to start working.
This is how you'll see it.
1.6. Enter the web interface.
- To access the web interface we will enter the following IP "192.168.3.1".
- The board will ask us for an access code, the key is "xilinx".
- Inside the interface you can see folders and a Jupyter Notebook, by default the board has Python 3 installed.
1.7. Access the files on the card.
- To access the files on the card, through the smb connection, you will have to go to the file browser and put in the address bar.
- \ 192.168.3.1 \ xilinx (for Windows, tested on Windows 10).
- smb: //192.168.3.1/xilinx (for Linux, tested on Ubuntu 18.04)
- On a Mac, it's not possible to connect correctly due to its USB Ethernet PCI connection protocol. We recommend that you use another operating system to be able to configure the board (Maybe you can use a virtual machine with linux)
1.8. Download and save the necessary files on the board. Download the files from the github repository.
- Link: https://github.com/EddOliver/BBM-Bridge-Baby-Monitor/
- Copy and paste the folder called "Hackster" in the path "/xilinx/jupyter_notebooks".
- Copy and paste the contents of the "FPGA" folder in the following path "/xilinx/pynq/overlays".
1.9. Now we will configure the Ultra96 by installing the corresponding packages so that our code runs without a problem.
- For the initial configuration; At the "Hackster" folder, you have to open the notebook called "First_Setup.ipynb".
- Once inside the Notebook, run the command in point 1.
- This command configures the WiFi network on the board, in order to download the packages.
- If it is connected correctly, the text "WiFi Ready" will be printed.
- When it finishes executing, we will run the command at subsection 2 which downloads the necessary packages for the board to work.
- This process will take between 5 and 15 min depending on your Internet speed.
- If this process goes well, a sign that says "All the Packages were installed correctly" will be printed on the bottom of the console.
When this process has finished, execute the command in part 3 to obtain the IP of the board. THIS PROCESS IS VERY IMPORTANT SINCE THE IP WILL BE USED LATER FOR THE COMMUNICATION OF THE RASPBERRY AND THE ARDUINO BY MQTT.
1.10. We have made the initial setup for the Ultra96.
Accelerometer configuration for the Arduino 101:- For this project the sensor on board of the Arduino 101 was used because it was the sensor that we had at hand, it is also more interesting to show the integration of an Arduino 101 to a solution of this type.
PD. It is also possible and reccomended to use any other Accelerometer or IMU and connect it directly to the Raspberry Pi Zero W that we will configure later. IMU's are expensive so we used what was at hand
2.1. Arduino 101 configuration on the PC.
- For this step you have two options:
- Use the Arduino WebEditor, in which you don't have to install anything, but you need an account, we reccomend that you create it, as it is free :3
- Link: https://create.arduino.cc/
- If you prefer to use the editor in the Arduino IDE Desktop Editor, read the official Arduino 101 documentation for information on how to install the arduino curie according to your operating system.
- Link: https://www.arduino.cc/en/Guide/Arduino101
2.2. Program the Arduino 101 with the code provided.
- If you chose to use the WebEditor:
- The code link: https://create.arduino.cc/editor/Altaga/88928a34-3c20-4968-96a6-6413fe2f357b/preview
- If you chose to use the Desktop Editor:
- In the github folder called "AccelerometerCurie" you will find the.ino file.
- For this point, it's also possible to use an ESP32 or an ESP8266 with an accelerometer, instead of the Arduino 101 and the Raspberry Pi Zero connecting it through MQTT.
3.1. Download the operating system of the Raspberry Pi Zero.
- To download the operating system of the Raspberry enter the following link:
- Link: https://downloads.raspberrypi.org/raspbian_lite_latest
- We will download the lite version.
3.2. Flash the operating system in the SD as shown in point 1.2 but with raspbian.
- Through Etcher flash the raspberry operating system but DO NOT put it inside the raspberry yet.
3.3. Create a wpa_supplicant for the connection of the raspberry to the internet.
- Since we have flashed the operating system, we copy and paste the files from the "RaspberryPi" folder directly into the SD card.
- Then we open the "wpa_supplicant.conf" file with a text editor
- In between the quotes in the ssid line write your wifi network and in psk the network key.
country = us
update_config = 1
ctrl_interface =/var/run/wpa_supplicant
network =
{
scan_ssid = 1
ssid = "yourwifi"
psk = "yourpassword"
}- We save the changes and remove the SD from the PC.
3.4. We then place the SD in the raspberry and connect it to its power source.
- The power source of a Raspberry Pi Zero is recommended to be from 5 volts to 1A minimum. We recommend the official ower supply for the Raspberry pi.
3.5. Once the Raspberry has already started, we need to access it through SSH or with a keyboard and a monitor.
- If you want to access it through SSH we need your IP.
- In order to analyze your network and obtain the number we will have to use one of the following programs.
- Advanced IP Scanner (Windows) or Angry IP Scanner program (Windows, Mac and Linux).
- In the following image you can see how we got the Raspberry IP.
raspberry lookout.
3.6. Copy the program inside the "RaspberrySoft" folder using FileZilla to the raspberry.
- To pass the file via wifi to the raspberry we have to download another program called "FileZilla".
- Link: https://filezilla-project.org/download.php?type=client
- Once we have the program, we open it and input the following data in the upper bar to access the raspberry.
Host: RASPBERRYIP Username:pi Password:raspberry port:22
Press Quickconnect.
- Once we enter the Raspberry, we copy the file "exe.py" in the folder "/home/pi".
3.7. Since we have the file in the raspberry, now we have to connect the raspberry with ssh.
- To connect using ssh to the raspberry we need the Putty program.
- Link: https://www.chiark.greenend.org.uk/~sgtatham/putty/latest.html
- This program will let us access the command console of the raspberry.
- In Linux, just open the terminal and put the following command.
ssh pi@RASPBERRYIPPassword: “raspberry”
3.8. First, we will install the necessary libraries for our program to work.
- For it to work we just have to input the following command.
sudo apt-get update && sudo apt-get install -y python-pip && pip install pyserial paho-mqtt- This command will install the pyserial and paho-mqtt libraries
3.9. Once the console is open, we will edit the file used in the previous paragraph to configure the IP of the Ultra96.
- In the Raspberry's terminal we will write the following command.sudo nano exe.py
- The command will open the text editor where we can go through the file "exe.py".
- We go down to the part shown in the image and instead of the text "ULTRA96IP" we will input the IP that we obtained in subsection 1.9.
- Since we changed that text, we will save the changes made by pressing "ctrl + o" and enter, and to exit the editor pressing "ctrl + c".
3.10. Input boot program for the Raspberry Zero. In order for the program to start together with raspbian, and for us to no longer need to execute it, we will write the following command.
sudo nano /etc/rc.localInside the file we will have to write the following:
sudo python /home/pi/exe.pyAfter adding that text, we will save the changes made by pressing "ctrl + o" and enter, to exit the editor press "ctrl + c".
3.11. Once we have finished editing this file, we are ready to connect everything and run our program in the Ultra96. Before proceeding, disconnect the raspberry and the arduino from their sources because we are going to connect them to each other.
Connection diagrams for all the devices:4.1. Schematic:
4.2. Real connections:
- The black box below the raspberry is a 5v - 10000mA power bank.
5.1. Connect the Ultra96 to the network and activate Mosquitto.
- For this first test we will connect the Ultra96 first as shown in the point 4's diagram. and we will turn it on.
- Access the web interface where the Jupyter Notebooks are.
- Enter the Hackster folder.
- Open the "Bridges.ipynb" and "Wifi_Mosquitto.ipynb" notebook.
- Enter the "Wifi_Mosquitto.ipynb" notebook.
- Input SSID and PSW data.
- Press run to start the program to connect to your WiFi network and activate the Mosquitto broker.
5.2. Connection to the Ultra96 broker.
- Once everything connects correctly, we then enter the "Bridges.ipynb" notebook.
- Execute the main code, if everything goes well we will notice as it says "Connected to the broker" meaning that there is a correct connection.
5.3. Connect the sensor module.
- Connect your power supply to the raspberry and leave it.
5.4. Check that the data reaches the board.
- If the data is arriving correctly, according to the sampling specifications that we have programmed, we will receive notifications that the frequencies are being saved in a CSV file.
5.5. Once all the data samples have been made, the system will take the stored data and load it into the machine learning model so that it learns each iteration and becomes a more precise continuous learning model.
- Finally, we have to get some IoT capabilities, we will create a Watson IoT Dashboard to visualize the data remotely.
- You can see in the main code that we are already posting on Watson IoT, to create credentials and setup we can refer you to another one of our projects: https://github.com/EddOliver/AggroFox
- To Create a Cloudant instance (Change the credential in the "Bridges" code for your credentials):
- Your API for pushetta is in this link (You need to create an account first, its free :3).
http://www.pushetta.com/my/dashboard/
- To create a Watson IoT application you can follow this one:
https://github.com/altaga/The-Ultimate-IBM-Watson-IoT-Platform-Guide
- But for this case we will go to the upper section to the "Boards" section.
- Once here, we create a new board.
- Name it as you wish.
- On the upper left corner we create another two cards (One line chart and one with a "Value"), you can always experiment with more.
- We have to select the device for every card.
- For the line chart we will use the following setup of events and properties, this graph will show the risk values en XYZ in real time.
- Lastly, in the "Value" card, we will use the following setup:
- Now you have a quick and easy IoT dashboard.
- For the project to be tested before going to the place where it would be implemented, we made a platform where we could recreate an oscillatory movement that the sensors could capture.
7.1. Test platform with Arduino.
A platform with an arduino system and a shield of motors was built for this purpose, which served to recreate a harmonic abnormal movement with the motors. To make it portable, we decided to use a Power Bank.
Once the platform was working, we allocated the sensor on the platform so that we could get an abnormal response.
Test platform.
- The results showed how the notification was sent correctly when it was required as the sensor measured an excessive amplitude over an X frequency.
7.2. Actual test on pedestrian bridge.
For the final test we decided to take the system to a pedestrian bridge in our university and outside, we monitored every so often to verify that the system worked correctly. More on that in the DEMO section.
Results:8.1. The results of the tests in the simulator and the tests in the field were the expected ones, as it was the effective reaction system and the stimuli generated. When analyzing the data of the field tests, the following results were obtained.
8.2. We obtained that the greatest amplitude in the bridge was generated at 0.33 Hz. This being the natural frequency of the bridge, the objective of the model we obtain will be to analyze if the bridge, through maintenance is decreasing that amplitude in its natural frequency.
Useful guides:
- How Create a Watson IoT application:
https://github.com/altaga/The-Ultimate-IBM-Watson-IoT-Platform-Guide
- How create a Cloudant client:
- For this part of the tutorial, we will show you how to make your own custom modules for the FPGA in a simple way using the two softwares provided by Xilinx, which are:
- Vivado Design Suite - HLx Editions and Vivado High-Level Synthesis (Included in the Suite)
- Direct Download: https://www.xilinx.com/member/forms/download/xef-vivado.html?filename=Xilinx_Vivado_SDK_2018.2_0614_1954.tar.gz
9.1. Development with Vivado code High-Level Synthesis.
- Open Vivado High-Level Synthesis, the options menu will appear and we will select "Create New Project"
- In the "Project name" type the name you want.
- For the saving route, we recommend it to be a personalized route and take a note of it (this route because will be of importance later).
- In "Top Function" write the name of the function, we recommend that it be a simple name and that you remember it for later.
- We will go to the "New File" button and create a new file as shown in the image.
- When we finish creating the file and adding it, we will give it "Next" twice and a screen like the following one will appear, where we will select "Part Selection" to choose the part that the Ultra96 has.
- The part of the Ultra96 is "xczu3eg-sbva484-1-e"
- Once this process is finished we will go to the upper left of the project and open the tab that says "Source" and we will double click on our module to open it.
Within our module we will write the following code:
// DONT MODIFY
#include "ap_axi_sdata.h"
#include "ap_int.h"
// DONT MODIFY
typedef ap_axiu<32,1,1,1> stream_type;
// MODIFY
float YOUR_OUTPUT=0;
float IN_NUMBER=0;
// DONT MODIFY
void YOUR_MODULE_NAME(stream_type* in_data, stream_type* out_data) {
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE axis port=in_data
#pragma HLS INTERFACE axis port=out_data
// MODIFY
// Your code structure in c goes from here
//This variable is the entry of the data sent by the DMA number by number.
IN_NUMBER = in_data->data;
// This is my structure to always get the highest number that has entered at the exit.
if(YOUR_OUTPUT < IN_NUMBER)
{
YOUR_OUTPUT = IN_NUMBER;
}
/*
I will send to this structure a series of data within an array and therefore send me the maximum value found in the array.
*/
// To here
// This is the declaration of the exit ports necessary to operate the DMA.
// DONT MODIFY
out_data->data = YOUR_OUTPUT;
out_data->dest = in_data->dest;
out_data->id = in_data->id;
out_data->keep = in_data->keep;
out_data->last = in_data->last;
out_data->strb = in_data->strb;
out_data->user = in_data->user;
}The code is commented on what parts you should write and what not, this in order to create a code based on the data transfer by DMA, which is the fastest way in hardware to move data, and also to be able to implement any structure in C that is required, which is very useful.
- Once the process of code writing is finished, we will go to the top of the window to the synthesis button to compile the code.
- If everything went well the code will be compiled and it will allow us to create our RTL, which is the file that we will import to Vivado Design Suite - HLx Editions to put it in our design, as blocks of the FPGA.
8.2. Development of overlay with blocks in Vivado Design Suite - HLx Editions:
- First open the program and then create a new project.
- We create the name of the project with "ANY_NAME"
- In this option we input "do not specify sources at this time"
- We select the Ultra96 in the selection of boards.
Already in the project we select the option "Create Block Diagram"
- We press the Add IP button.
- In the search menu we type "Ultra" and select the option of the image to add the FPGA that has the Ultra96.
- It will open a module like this.
- In the part above we press this button so that the block is configured.
- We add a DMA module.
- We double-click on the module and remove the "Enable Scatter Gather Engine" option.
- We go to Tools - Settings - IP - Respository.
- In the IP Repositories option, we click on Add.
- We select the folder where we stored our module.
- Select your module and add it to your design.
- Since we have both DMA modules and your module we connect them as follows.
- We double click on the Ultra module where you will see this menu.
- We leave the PS-LS Configuration section and add the following port.
- Once we have finished our designs, we press the next button to automatically connect everything, we will do this process as many times as this button appears so that the connections are finished.
- Once it is finished, we will have a module similar to this one.
- To make reference in the python code we will have to change the name of the DMA module in the Block Properties menu as seen in the image.
- Once this is over we go to the Sources tab and in our block we give "Create HDL Wrapper", remember well where you save it because it will be an important file for our project, also give it a simple name like "model.tcl".
Once the process is finished, we will press the "Generate Bitstream" button.
- The file was created in the path where the project ~ / vivado / ANY_NAME / ANY_NAME.runs / impl_1 / design_1_wrapper.bit was saved
- You have to copy that file and paste it into the folder where you saved the tcl, and give them both the same name.
- Once this is done we will paste both files in the Overlays folder of the Ultra96 as we did in subsection 1.8.
9.3. How to call our FPGA module in Python.
- Copy this code to a jupyter notebook for the module to work.
from pynq import Overlay
from pynq import DefaultIP
import pynq.lib.dma
from pynq import Xlnk
xlnk = Xlnk()
# Change this path with the path of your bitstream.
overlay = Overlay('/home/xilinx/pynq/overlays/model.bit')
# Write the name of your module as shown in the tutorial.
dma = overlay.MY_DMA
# Here you have to put the length of the arrangement that you will send to the module.
in_buffer = xlnk.cma_array(shape=(YOUR_ARRAY_SIZE,), dtype=np.float32)
out_buffer = xlnk.cma_array(shape=(YOUR_ARRAY_SIZE,), dtype=np.float32)
# Copy your array data in in_buffer before run this part
dma.sendchannel.transfer(in_buffer)
dma.recvchannel.transfer(out_buffer)
dma.sendchannel.wait()
dma.recvchannel.wait()
# After this, the data was in your out_buffer9.4. Here we show some results, we can see that using the FPGA is an overwhelming advantage over just the processor.
The use of the FPGA to accelerate our models gave us more than a 2000% faster processing.
Now, Computer Vision and Vitis:This is the main upgrade to our system, using the past development we deecided to upgrade it by using Computier vision via the Vitis suite.
For this part we are going to go all out and process thee images that a 360 degree camera is taking. In the following way:
To perform the video processing, a continuous image capture of the 360 camera was made, through its API we obtained 360 images of the Ricoh Theta V, These images were processed with the example of YoloV3-DPU proposed in Pynq for the Ultra96. The images that we obtain from the API of the 360 camera are elongated 360 images, that is, they do not maintain their 360 properties.
It is common for 360 degree images to be only a long image, in turn we implementeed in the code a label filter to only detect objects with a minimum precision of 60% and avoiding objects that we are not going to find easily on a bridge. As usual the code is in our github and everything is explained in detail.
Here are some demos of it WORKING ON AN ACTUAL BRIDGE!!!
And just for fun some Benchmarks:
Clearly for this application the way to go is with Xillinx.
DEMO:Here is the video summarizing the project:
Business OpportunityPredictive maintenance is practically a new market but it will have a great growth spur in the next few years.
"MarketsandMarkets forecasts the global predictive maintenance market size to grow from USD 3.0 billion in 2019 to USD 10.7 billion by 2024, at a Compound Annual Growth Rate (CAGR) of 28.8% during the forecast period. The major growth drivers of the market include the increasing use of emerging technologies to gain valuable insights, and growing need to reduce maintenance cost and downtime."
Great growth for the predictive maintenance market. *Markets and markets
Apart from we can just take a look at our countries' aging infrastructure. The average age of bridges in north america is nearing 50 years. Instead of replacing them solutions like this one can help us know when they need maintenance and improve their conditions to extend their lifespan. These two facts co-joined give this project one of the strongest financial viabilities that we can find, and it only needs small support from the correct people and institutions.
CommentaryWith this one, this is the FOURTH iteration of the project, in the past we have made similar platforms for predictive maintenance on bridges, always looking for the proper and best way to track critical oscillations that may result in structural failure. By now we have even experimented with FPGA's with the Ultra96 and a cellular-based solution. But, the problem invariably has always been on the side of the sensors. Whether they were too bulky or didn't work as intended, and also sometimes the platform was too cumbersome or its architecture too complex. The updatees to the Ultra96 platform and the Vitis Computer vision alternative offered a good solution in this regard, primarily for Edge applications such as this one. This was a great advantage over the other solutions.
We will continue to develop the CV part as it can be exploited much more, perhaps in a time when we have people again crossing bridges after COVID.
Hope you liked the article and thanks for reading.
References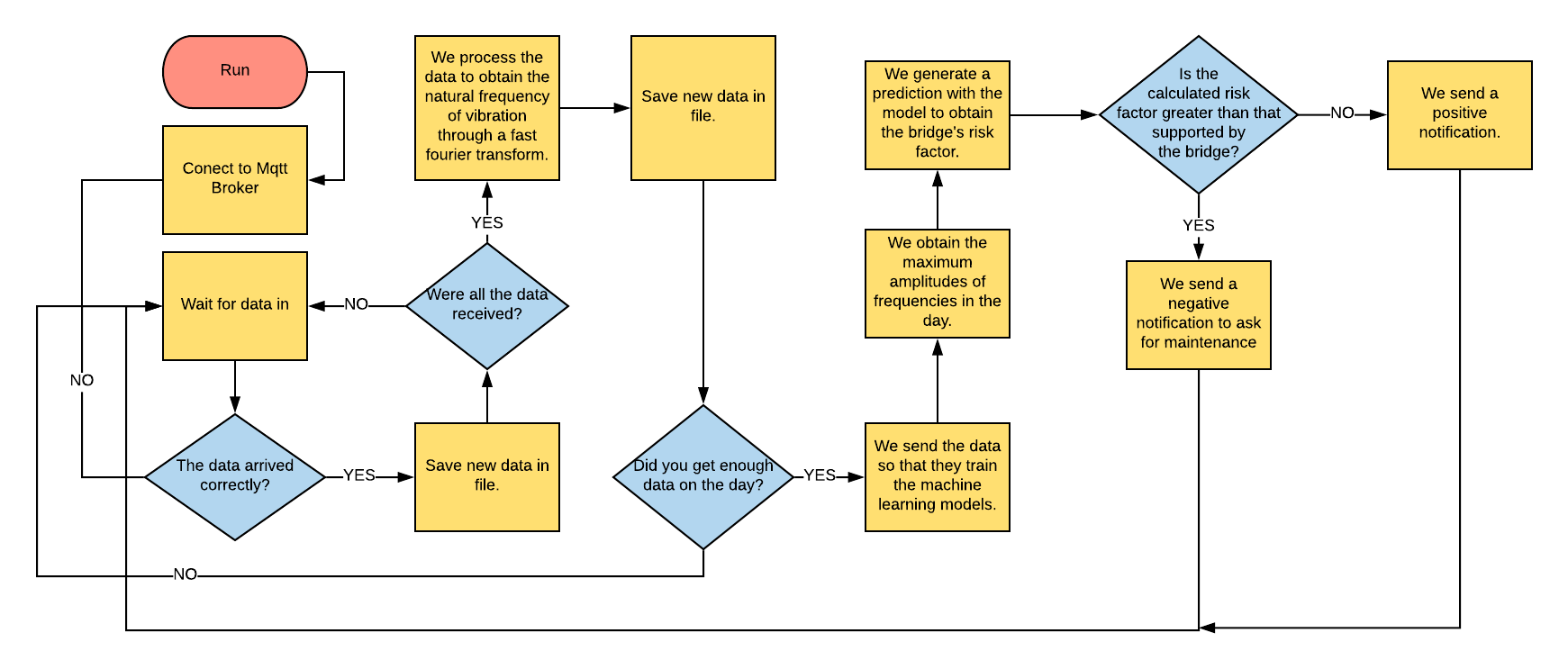



{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.