



Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Can students help the water service providers to work more efficiently?
Water is key element, there would not be life without it on Earth. Everybody is aware of these facts. The underwater robot we produced is able to do different duties cost-effectively which scuba divers cannot do. The robot is remotely controlled and moves on a predefined route, and can perform predefined tasks. In the recent years a prototype was made which was awarded on a competition of the Hungarian Association for Innovation, from these experiences we started to build another ROV. We have to use water carefully. More and more people are convinced to change there water using habits.
Are service providers able to be more provident?
Our small researcher group called Bánkirobot, looked up for our local water utility company with this question and wanted to find ways of cooperation. The experts were open-minded. All of them listened carefully to our presentation of the robot and they instantly shared some potential areas for using the Underwater Cyclops to save water more efficiently.
1. The maintenance of water reservoirs, which form an integral part of the water utilities. This task is performed by NYÍRSÉGVÍZ Zrt. twice a year, based on the annual maintenance schedule, surface cleaning after the pools are drained, assembly work ability testing, repair work.
In order to increase the efficiency of maintenance, important information is available if, prior to maintenance, photo or video recordings are made, which the experts evaluated. The service provider’s expectation is to make sure about the surface it is fine without drain the reservoir. If the repair is required, the utility could check the photos, and videos, and could make the preparations, and after the repair.
2. By archiving the recordings of regular examinations, it is possible to compare with the recordings made in earlier periods, so that possible major repairs and investments can be solved cost-effectively and the life expectancy of the pools can be determined.
According to preliminary estimates, it is ideal to avoid draining thousands of cubic meters of water!
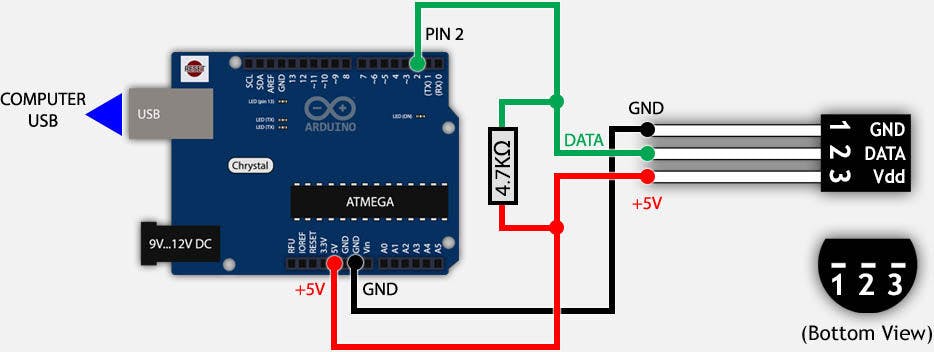
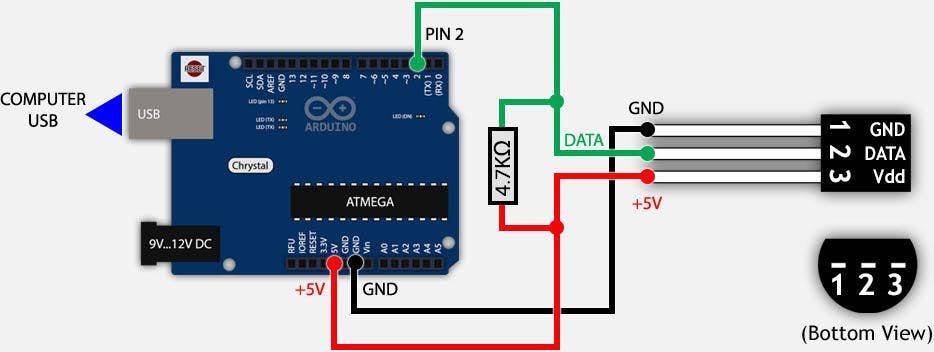
You can modify this!We built a robot using 1 temperature measuring sensor, a photo resistor and 5 bilge pump motors. You have to split the UTP cable and use a switch in order to communicate with the Ethernet shield and with the IP camera in the same time. We used a D-link DCS-5030L IP camera. We will attach for you the Python and the Arduino code. In the computer you have to set for you an IP address, you can do this in the IPV4 settings. In the Arduino code you have to write your Ethernet shield's mac address and another IP address but in the same range (example: In the PC you set 192.168.1.12 and in the Arduino and in the Python code you have to set 192.168.1.14). You can find a picture about the UTP cable splitting.




{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.