/*
This is a sketch written by XA & Bernhard Jordi
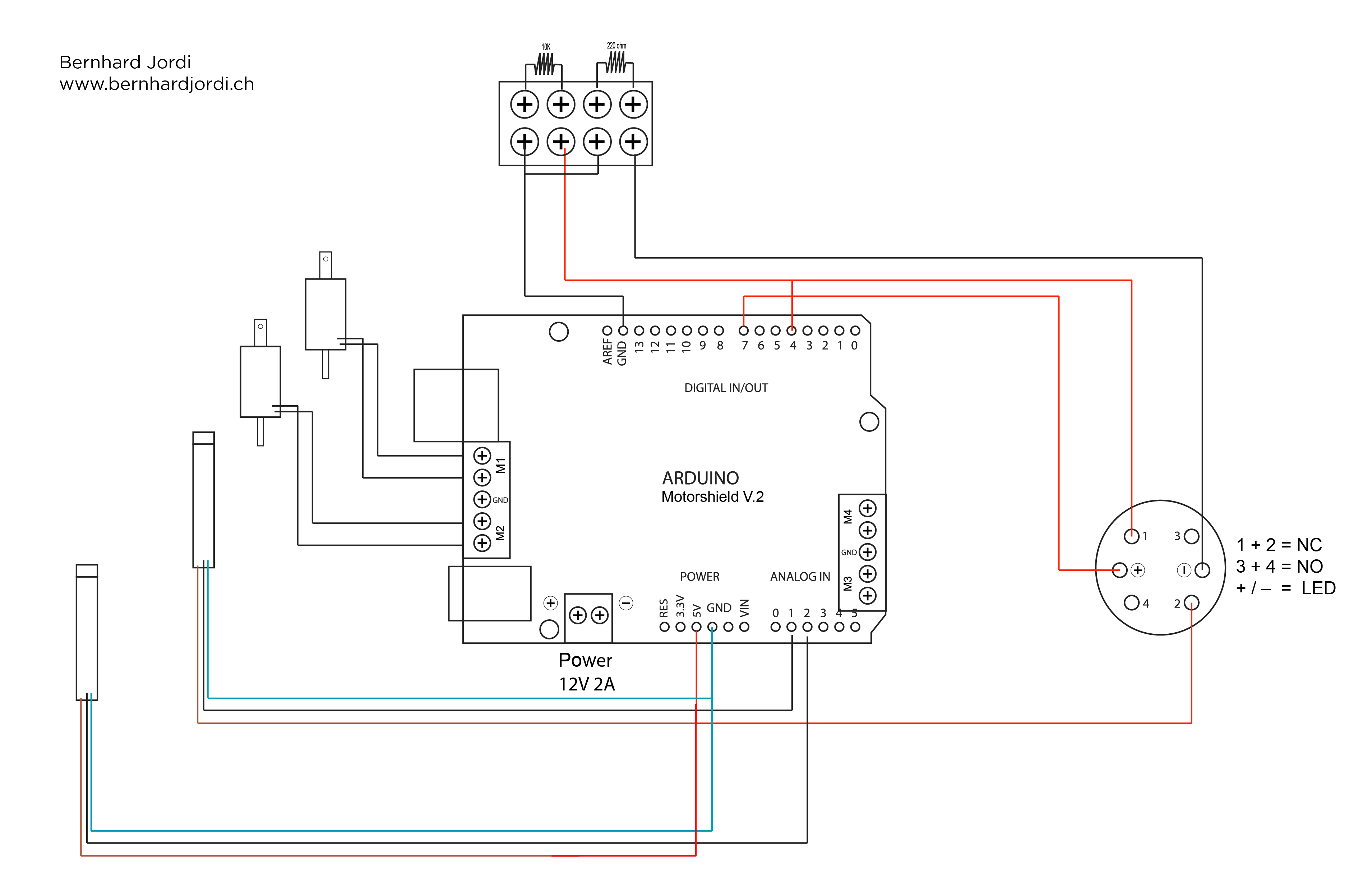
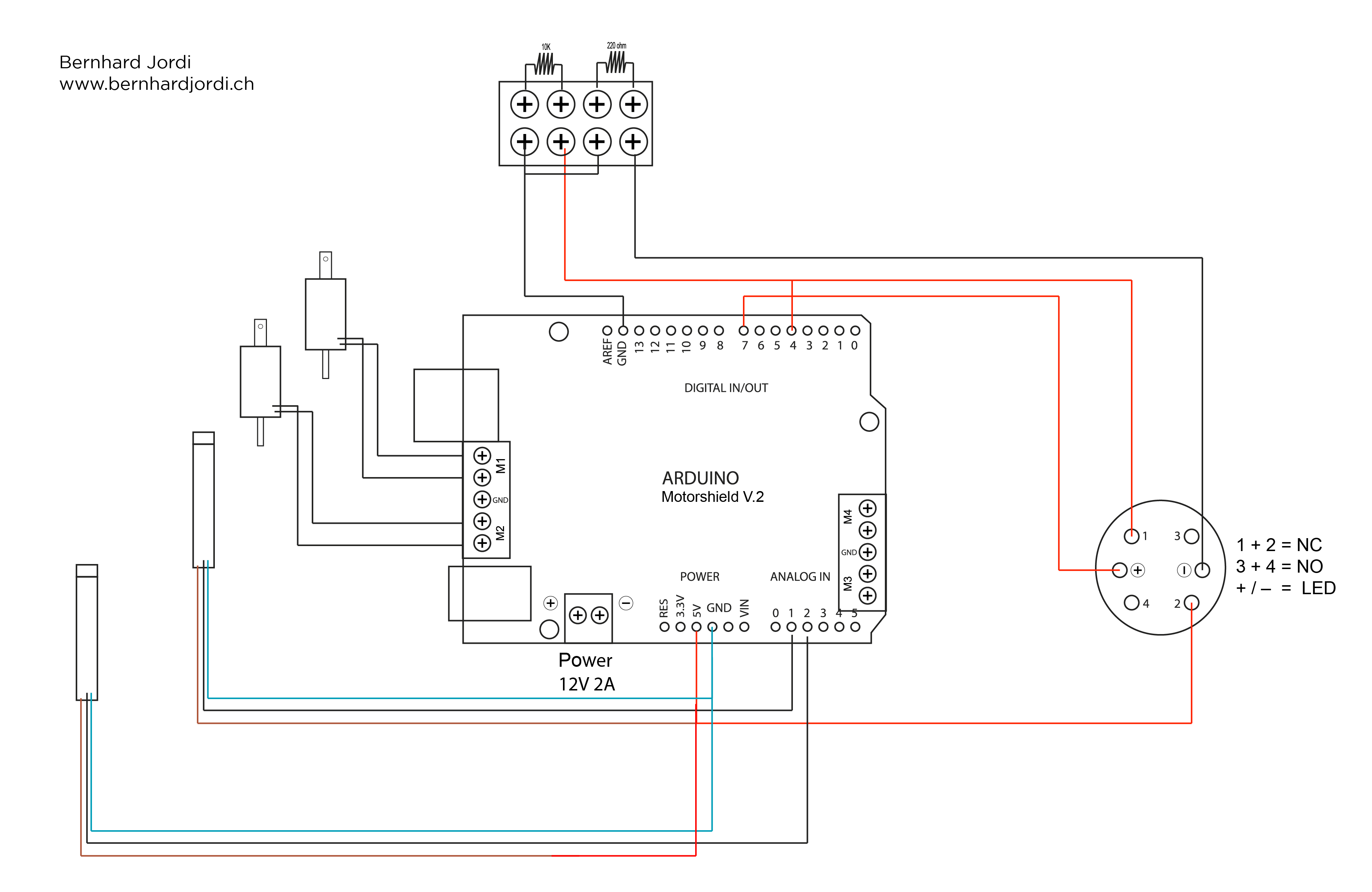
for the sculpture "PingHader"
www.bernhardjordi.ch
*/
#include <Wire.h>
#include <AccelStepper.h>
#include <Adafruit_MotorShield.h>
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
Adafruit_MotorShield AFMSbot(0x61); // Rightmost jumper closed
Adafruit_MotorShield AFMStop(0x60); // Default address, no jumpers
// Ausgabe anstellen?
const bool DEBUG = true;
int state = 0;
unsigned long state_2_millis = 0;
// Spicker: Select which 'port' M1, M2, M3 or M4
Adafruit_DCMotor *myMotor1 = AFMS.getMotor(1); // Anschluss M1
Adafruit_DCMotor *myMotor2 = AFMS.getMotor(2); // Anschluss M2
// Spickknopf: Sensor (Knopf) bei Spickmotor
const int BUTTON_SPICKMOTOR_PIN = A1; //
const int BUTTON_SPICKMOTOR_PIN2 = A2; //
// Druckknopf mit Licht
const int LED_BUTTON_LED_PIN = 7; // Licht.
const int LED_BUTTON_PRESSED_PIN = 4; // Knopf.
// variables will change:
int button_led_state = 0; // Variable für Lichtknopf
int button_spickknopf_state = 0; // Variable für Spickerknopf
int button_spickknopf_state2 = 0; // Variable für Spickerknopf2
int maximale_anzahl_erfolgreiche_durchlaeufe;
unsigned long debug_millis = 0;
void setup() {
// set up Serial library at 9600 bps
if( DEBUG ) {
Serial.begin(9600);
}
// Sensor (Knopf) bei Spickmotor
pinMode(BUTTON_SPICKMOTOR_PIN, INPUT);
pinMode(BUTTON_SPICKMOTOR_PIN2, INPUT);
// Druckknopf mit abgestelltem Licht
pinMode(LED_BUTTON_LED_PIN, OUTPUT);
digitalWrite(LED_BUTTON_LED_PIN, LOW); // Kein Licht
pinMode(LED_BUTTON_PRESSED_PIN, INPUT);
// Zahnradmotor
AFMStop.begin(); // muss vo AFMS.begin() geshcehen !!!!!
// Spickmotor
AFMS.begin(); // create with the default frequency 1.6KHz. Muss nach AFMStop.begin() geschehen !!!!!
myMotor1->setSpeed(255);
myMotor1->run(RELEASE);
myMotor2->setSpeed(255);
myMotor2->run(RELEASE);
// Zufallsgenerator auf zufälligen Startwert
randomSeed(analogRead(0));
debug_millis = millis();
}
void loop() {
// Strom an -> 0
// Status 0: delay -> 1
// Status 2: Licht Startknopf anstellen -> 3
// Status 3: Warten auf Drücken des Startknopfs, Anzahl erfolgreiche Durchläufe festlegen, Licht Startknopf abstellen -> 4
// Status 5: Impuls Spickknopf gedrückt? ->
// Status 7: Spicken. -> 12
// Status 12: Wenn maximale Anzahl Durchläufe erreicht -> 2, sonst -> 5
// DEBUG:
if(DEBUG && (millis() - debug_millis > 1000)) {
myprint("...");
debug_millis = millis();
}
switch (state) {
case 2:
state_2();
break;
case 3:
state_3();
break;
case 5:
state_5();
break;
case 7:
state_7();
break;
case 8:
state_8();
break;
case 12:
state_12();
break;
default: // 0
state_0();
break;
}
}
// Status 0: Spickmotor kurz an- und abstellen
void state_0() {
// Spickmotor kurz an- und abstellen
delay(1000);
myprint("state0.");
state = 2;
}
// Status 2: Licht Startknopf anstellen
void state_2() {
myprint( String("") + "Licht Startknopf anstellen");
// Licht Startknopf anstellen
digitalWrite(LED_BUTTON_LED_PIN, HIGH);
state = 3;
}
// Status 3: Warten auf Drücken des Startknopfs, Anzahl erfolgreiche Durchläufe festlegen, Licht Startknopf abstellen -> 5
void state_3() {
// Warten auf Drücken des Startknopfs
myprint("status3");
button_led_state = digitalRead(LED_BUTTON_PRESSED_PIN);
if (button_led_state == HIGH) {
myprint("Startknopf wurde gedrueckt.");
maximale_anzahl_erfolgreiche_durchlaeufe = random(3, 23);
myprint(String() + "Anzahl Durchläufe zufaellig auf " + maximale_anzahl_erfolgreiche_durchlaeufe + " festgelegt");
myprint("Stelle Licht Startknopf ab.");
// Licht Startknopf abstellen
digitalWrite(LED_BUTTON_LED_PIN, LOW);
delay(1000);
state = 5;
}
}
// Status 5: Impuls Spickknopf gedrückt?
void state_5() {
// Wenn Spicksensor (Knopf) gedrückt
button_spickknopf_state = analogRead(BUTTON_SPICKMOTOR_PIN);
if (button_spickknopf_state >= 500) {
myprint("Spicksensor gibt an...");
state = 7;
}
button_spickknopf_state2 = analogRead(BUTTON_SPICKMOTOR_PIN2);
if (button_spickknopf_state2 >= 500) {
myprint("Spicksensor2 gibt an...");
state = 8;
return;
}
}
void state_7() {
delay(random(0, 5000));
spicke();
delay(500);
state = 12;
}
void state_8() {
delay(random(0, 5000));
spicke2();
delay(500);
state = 12;
}
// Status 12: Wenn maximale Anzahl Durchläufe erreicht -> 2, sonst -> 4
void state_12() {
maximale_anzahl_erfolgreiche_durchlaeufe = maximale_anzahl_erfolgreiche_durchlaeufe - 1;
myprint(String() + "Noch " + maximale_anzahl_erfolgreiche_durchlaeufe + " Durchlaeufe...");
if( maximale_anzahl_erfolgreiche_durchlaeufe == 0) {
state = 2;
} else {
state = 5;
}
}
// Hilfsfunktion. Spickmotor spickt.
void spicke() {
// Spickmotor kurz an- und abstellen
myprint("Spickmotor spick!");
myMotor1->run(FORWARD); // ON
delay(500);
myMotor1->run(RELEASE); // OFF
}
void spicke2() {
// Spickmotor kurz an- und abstellen
myprint("Spickmotor2 spick!");
myMotor2->run(FORWARD); // ON
delay(500);
myMotor2->run(RELEASE); // OFF
}
void myprint(String text) {
if( DEBUG ) {
Serial.println(String("") + millis() + " ms, Status " + state + ": " + text);
}
}












{kind=link}
Comments
Please log in or sign up to comment.