


Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
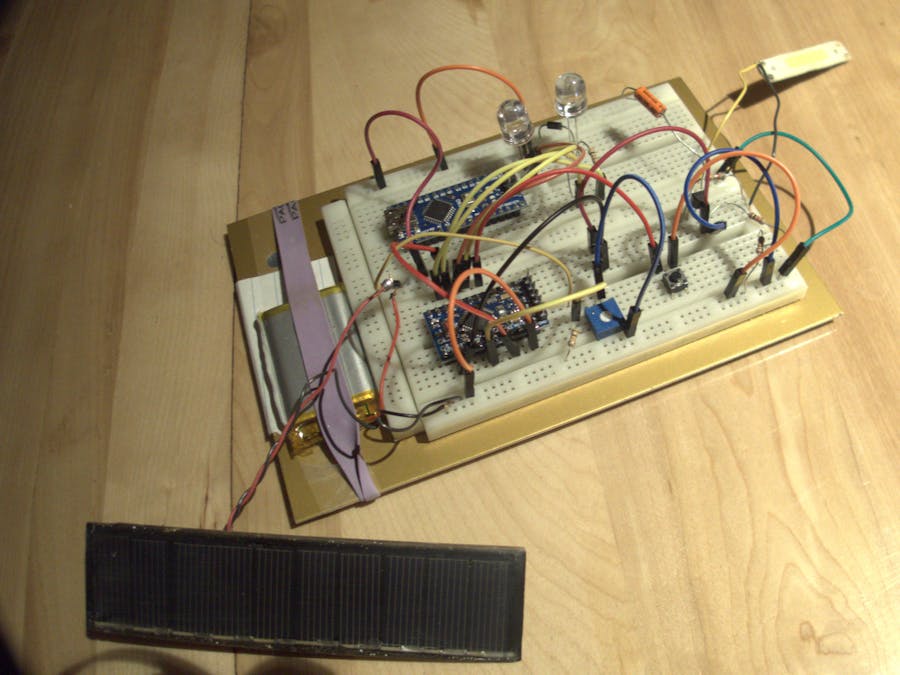
Flash Light Controller, White LED, and navigation (red, green) and charging with Solar Panel.
6 modes, (work in progress)
- Mcu atmega328P 3.3v
- LiPo battery
- 2n7000
- Red LED 80ma
- Green LED 80ma
- White LED 100ma
- pb switch
- Shockley diode
- few resistor
- solar cell 5 volts 120 mamps
You will need to remove the Arduino power LED and the voltage regulator in order to minimize the power consumption. Mode: press and hold, wait for the green led flash the appropriate number and release.
- Flash and release: Green/Red LED flashing every 1 sec (small boat navigation)
- Flash and release: White LED 10%
- Press and hold: set Level 10-100%. Off in 60 min
- Press and release: Auto Off, slowly dimming down Off in 60 min, nightlights mode
- Flash and release:release SOS
- Flash release: RED 20% - Auto Off with Sun. Release
Press and release 100%. Off in 60 min
- Flash and release: White Strobe 100%, every 2 sec, off with sun, on with the night release
- Flash and release: Battery Level 1 to 10 flash (10-100%) release, auto off
And more... (any idea is welcome). Any time you can push the switch for turn off the (sleep mode).
// By Christian Roy
// Norsak LED controler
// rev_09
//#include <avr/sleep.h>
#include <avr/power.h>
#include <avr/sleep.h>
#include <Vcc.h>
#include <avr/wdt.h>
byte sw1 = 2 ;//pin
byte LED_White = 11;//pin
byte LED_Red1 = 6;//pin
byte LED_Red2 = 7;//pin
byte LED_Green1 = 5;//pin
byte LED_Green2 = 4;//pin
byte Read_Batt = 3;//pin
float LED_W_Max;
const float VccMin = 2.7; // Minimum expected Vcc level, in Volts.
const float VccMax = 4.2; // Maximum expected Vcc level, in Volts.
const float VccCorrection = 1.0 / 1.0; // Measured Vcc by multimeter divided by reported Vcc
Vcc vcc(VccCorrection);
byte LED_W_pwr;
boolean dimmer = false ;
int timer;
int Tsel;
byte select;
int batt = 0 ; //pin
int SolPanel = 1; //pin
float vSol; // voltage at the solar panel
float V10;
boolean RedGreen = false;
///////////////////////////////////////////////////////////////
void setup()
///////////////////////////////////////////////////////////////
{
analogReference(INTERNAL);//equal to 1.1 volts on ATmega328P
//pinMode(LED_BUILTIN, OUTPUT); digitalWrite (LED_Red1,LOW); // LED On
pinMode(sw1, INPUT_PULLUP);
pinMode(LED_White, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
analogWrite(LED_White, 0); //0 = OFF & 255 ON
pinMode (LED_Red1, INPUT); // High Impedence LED Off
pinMode (LED_Red2, INPUT); // High Impedence LED Off
pinMode (LED_Green1, INPUT); // High Impedence LED Off
pinMode (LED_Green2, INPUT); // High Impedence LED Off
//digitalWrite(LED_BUILTIN, LOW);
Serial.begin(9600);
attachInterrupt(0, SW_ISR, CHANGE);
/*
The 5 different modes are:
SLEEP_MODE_IDLE -the least power savings
SLEEP_MODE_ADC
SLEEP_MODE_PWR_SAVE
SLEEP_MODE_STANDBY
SLEEP_MODE_PWR_DOWN -the most power savings
*/
}
void loop() {
/*
pinMode(LED_Red1, INPUT_PULLUP);
pinMode(LED_Red2, INPUT); // High Impedence LED Off
pinMode (LED_Red1,OUTPUT); // LED On
delay (5000);
pinMode(LED_Red1, OUTPUT); digitalWrite (LED_Red1,LOW); // LED On
delay (5000);
*/
///////////////////////////////////////////////////////////////
sleepNow();
///////////////////////////////////////////////////////////////
Tsel = 0;
select = 0;// SELECT
while (digitalRead(sw1) == LOW)
{
select ++;
pinMode (LED_Green1, OUTPUT); digitalWrite (LED_Green1, LOW); // LED On LED On
delay (12);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
delay (600);
}
delay (750);
switch (select)
{
////////////////////////////////////////////
/// Green RED ///
////////////////////////////////////////////
case 1:
attachInterrupt(0, SW_ISR, CHANGE);
while (1)
{
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
pinMode (LED_Red2, OUTPUT); digitalWrite (LED_Red2, LOW); // LED On
delay (50);
pinMode (LED_Red1, INPUT); // High Impedence LED Off
pinMode (LED_Red2, INPUT); // High Impedence LED Off
delay (450);
pinMode (LED_Green1, OUTPUT); digitalWrite (LED_Green1, LOW); // LED On
pinMode (LED_Green2, OUTPUT); digitalWrite (LED_Green2, LOW); // LED On
delay (50);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
pinMode (LED_Green2, INPUT); // High Impedence LED Off
delay (450);
}
break;
////////////////////////////////////////////
/// WHITE LED ///
////////////////////////////////////////////
case 2:
LED_W_pwr = 2;// minimum led white
analogWrite(LED_White, LED_W_pwr); //0 = OFF & 255 ON
delay (2510); //waitnig for power LED up
while (digitalRead(sw1) == LOW)
{
LED_W_pwr += 1;
analogWrite(LED_White, LED_W_pwr); //0 = OFF & 255 ON
delay(50);
if (LED_W_pwr > 240)// max led power
{
analogWrite(LED_White, 0);
delay (500);
analogWrite(LED_White, 240); // max led power
delay (500);
while (digitalRead(sw1) == LOW) {};
break;
}
}
delay (300);
pinMode (LED_Green1, OUTPUT); digitalWrite (LED_Green1, LOW); // LED On
delay (30);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
delay (500);
for (int t = 0; t < 100; t++) { //2 sec
if (digitalRead(sw1) == LOW) {
// full power on
pinMode (LED_Green1, OUTPUT); digitalWrite (LED_Green1, LOW); // LED On
dimmer = true;
while (digitalRead(sw1) == LOW) {};
delay (25);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
}
delay (20);
}
if (dimmer == true) {
float W_LED_Dim ;
W_LED_Dim = (float)LED_W_pwr / 360;
attachInterrupt(0, SW_ISR, CHANGE);
for (float LED_W_pwrf = LED_W_pwr ; LED_W_pwrf > 0; LED_W_pwrf = LED_W_pwrf - W_LED_Dim) {// 360 = 30 min.
delay (5000);//5sec
analogWrite(LED_White, LED_W_pwrf);
}
}
else
{
attachInterrupt(0, SW_ISR, CHANGE);
delay (3600000); //mSec
}
asm volatile (" jmp 0");
break;
////////////////////////////////////////////
/// S O S ///
////////////////////////////////////////////
case 3:
////Serial.println("SOS");
attachInterrupt(0, SW_ISR, CHANGE);
while (1)
{
dot(); dot(); dot(); // S
delay(700);
dash(); dash(); dash(); // O
delay(700);
dot(); dot(); dot(); // S
delay(6000);
}
break;
////////////////////////////////////////////
/// LED RED ///
////////////////////////////////////////////
case 4:
pinMode(LED_Red2, INPUT); // High Impedence LED Off
pinMode (LED_Red1, OUTPUT);//digitalWrite (LED_Red1,LOW); // LED On
analogWrite(LED_Red1, 235);// 15%, 255 = OFF & 0 ON
delay (1500);
if (digitalRead(sw1) == LOW) {
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On full power on
pinMode (LED_Red2, OUTPUT); digitalWrite (LED_Red2, LOW); // LED On
while (digitalRead(sw1) == LOW) {};
attachInterrupt(0, SW_ISR, CHANGE);
delay (3600000); //60 mins
asm volatile (" jmp 0");
}
ADCSRA = 135; //enable analog digi
attachInterrupt(0, SW_ISR, CHANGE);
delay (100);
while (1) {
vSol = analogRead (SolPanel);
//Serial.println(vSol);
if (vSol > 600) { //no sun
asm volatile (" jmp 0");
}
delay (500);
}
break;
////////////////////////////////////////////
/// White Flaing with Sun ///
////////////////////////////////////////////
case 5:
attachInterrupt(0, SW_ISR, CHANGE);
while (1) {
ADCSRA = 135; //enable analog digi
delay (100);
vSol = analogRead (SolPanel);
if (vSol < 600) { //Volts or no sun
digitalWrite(LED_White, HIGH);
delay(20);// mSec
digitalWrite(LED_White, LOW);
}
pause (2000);// msec
}
break;
////////////////////////////////////////////
/// B A T T E R Y ///
////////////////////////////////////////////
case 6:
ADCSRA = 135; //enable analog digi
delay (100);
attachInterrupt(0, SW_ISR, CHANGE);
timer = 0;
while (digitalRead(sw1) == HIGH && timer < 4) //stop after n times
{
float p = vcc.Read_Perc(VccMin, VccMax);
//Serial.print (p);
//Serial.println ("%");
V10 = int(p) / 10;
for (int v = 0; v < V10; v++)
{
pinMode (LED_Green1, OUTPUT); digitalWrite (LED_Green1, LOW); // LED On
delay (10);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
delay (650);
}
for (int v = V10; v < 10; v++)
{
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
delay (10);
pinMode (LED_Red1, INPUT); // High Impedence LED Off
delay (650);
}
delay (2000);
timer++;
}
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
while (digitalRead(sw1) == LOW) {}; delay(250);
asm volatile (" jmp 0");
break;
}
}
////////////////////////////////////////////////////////
void dot()
////////////////////////////////////////////////////////
{
analogWrite(LED_White, 160); //0 = OFF & 255 ONdigitalWrite(LED_White, HIGH);
delay(22);
digitalWrite(LED_White, LOW);
delay(500);
}
////////////////////////////////////////////////////////
void dash()
////////////////////////////////////////////////////////
{
analogWrite(LED_White, 20); //0 = OFF & 255 ONdigitalWrite(LED_White, HIGH);
delay(150);
digitalWrite(LED_White, LOW);
delay(800);
}
////////////////////////////////////////////////////////
// sleep Now //
////////////////////////////////////////////////////////
void sleepNow()
{
// disable ADC
ADCSRA = 0;
set_sleep_mode(SLEEP_MODE_PWR_DOWN);//SLEEP_MODE_PWR_SAVE);
interrupts();
attachInterrupt(0, pinInterrupt, HIGH);
sleep_enable();
sleep_mode();
sleep_disable();
}
////////////////////////////////////////////////////////
void pinInterrupt()
////////////////////////////////////////////////////////
{
detachInterrupt(0);
attachInterrupt(0, pinInterrupt, HIGH);
}
////////////////////////////////////////////////////////
// Interrupt Service Routin //
////////////////////////////////////////////////////////
void SW_ISR() {
analogWrite(LED_White, 0);
MCUCR = bit (BODS) | bit (BODSE); // turn off brown-out enable in software
MCUCR = bit (BODS);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
pinMode (LED_Green2, INPUT); // High Impedence LED Off
pinMode (LED_Red1, INPUT); // High Impedence LED Off
pinMode (LED_Red2, INPUT); // High Impedence LED Off
//pinMode(LED_Green1, OUTPUT); digitalWrite (LED_Red1,LOW); // LED On
for (long x = 0; x < 20000; x ++) {
pinMode (LED_Red1, INPUT); // delay
}
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
while (digitalRead(sw1) == LOW) {};
delay(250);
asm volatile (" jmp 0");
}
/////////////////////////////////////////////////////////////////////
// P A U S E and S L E E P //
/////////////////////////////////////////////////////////////////////
void pause(int WDPset)
{
// disable ADC
ADCSRA = 0;
// clear various "reset" flags
MCUSR = 0;
// allow changes, disable reset
WDTCSR = bit (WDCE) | bit (WDE);
// set interrupt mode and an interval
switch (WDPset) {
case 125:
WDTCSR = bit (WDIE) | bit (WDP1) | bit (WDP0); // set WDIE, and .125 second delay
break;
case 250:
WDTCSR = bit (WDIE) | bit (WDP2); // set WDIE, and .25 second delay
break;
case 500:
WDTCSR = bit (WDIE) | bit (WDP2) | bit (WDP0); // set WDIE, and .5 second delay
break;
case 1000:
WDTCSR = bit (WDIE) | bit (WDP2) | bit (WDP1); // set WDIE, and 1 second delay
break;
case 2000:
WDTCSR = bit (WDIE) | bit (WDP2) | bit (WDP1) | bit (WDP0); // set WDIE, and 2 second delay
break;
case 4000:
WDTCSR = bit (WDIE) | bit (WDP3) ; // set WDIE, and 4 second delay
break;
case 8000:
WDTCSR = bit (WDIE) | bit (WDP3) | bit (WDP0); // set WDIE, and 8 second delay
break;
}
wdt_reset(); // pat the dog
set_sleep_mode (SLEEP_MODE_PWR_DOWN);
noInterrupts (); // timed sequence follows
sleep_enable();
// turn off brown-out enable in software
MCUCR = bit (BODS) | bit (BODSE);
MCUCR = bit (BODS);
interrupts (); // guarantees next instruction executed
sleep_cpu ();
// cancel sleep as a precaution
sleep_disable();
}
ISR (WDT_vect)
{
wdt_disable(); // disable watchdog
} // end of WDT_vect
// By Christian Roy
// Norsak LED controler
// rev_09
//#include <avr/sleep.h>
#include <avr/power.h>
#include <avr/sleep.h>
#include <Vcc.h>
#include <avr/wdt.h>
byte sw1 = 2 ;//pin
byte LED_White = 11;//pin
byte LED_Red1 = 6;//pin
byte LED_Red2 = 7;//pin
byte LED_Green1 = 5;//pin
byte LED_Green2 = 4;//pin
byte Read_Batt = 3;//pin
float LED_W_Max;
const float VccMin = 2.7; // Minimum expected Vcc level, in Volts.
const float VccMax = 4.2; // Maximum expected Vcc level, in Volts.
const float VccCorrection = 1.0 / 1.0; // Measured Vcc by multimeter divided by reported Vcc
Vcc vcc(VccCorrection);
byte LED_W_pwr;
boolean dimmer = false ;
int timer;
int Tsel;
byte select;
int batt = 0 ; //pin
int SolPanel = 1; //pin
float vSol; // voltage at the solar panel
float V10;
boolean RedGreen = false;
///////////////////////////////////////////////////////////////
void setup()
///////////////////////////////////////////////////////////////
{
analogReference(INTERNAL);//equal to 1.1 volts on ATmega328P
//pinMode(LED_BUILTIN, OUTPUT); digitalWrite (LED_Red1,LOW); // LED On
pinMode(sw1, INPUT_PULLUP);
pinMode(LED_White, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
analogWrite(LED_White, 0); //0 = OFF & 255 ON
pinMode (LED_Red1, INPUT); // High Impedence LED Off
pinMode (LED_Red2, INPUT); // High Impedence LED Off
pinMode (LED_Green1, INPUT); // High Impedence LED Off
pinMode (LED_Green2, INPUT); // High Impedence LED Off
//digitalWrite(LED_BUILTIN, LOW);
Serial.begin(9600);
attachInterrupt(0, SW_ISR, CHANGE);
/*
The 5 different modes are:
SLEEP_MODE_IDLE -the least power savings
SLEEP_MODE_ADC
SLEEP_MODE_PWR_SAVE
SLEEP_MODE_STANDBY
SLEEP_MODE_PWR_DOWN -the most power savings
*/
}
void loop() {
///////////////////////////////////////////////////////////////
sleepNow();
///////////////////////////////////////////////////////////////
Tsel = 0;
select = 0;// SELECT
while (digitalRead(sw1) == LOW)
{
select ++;
pinMode (LED_Green1, OUTPUT); digitalWrite (LED_Green1, LOW); // LED On LED On
delay (12);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
delay (600);
}
delay (750);
switch (select)
{
////////////////////////////////////////////
/// Green RED ///
////////////////////////////////////////////
case 1:
attachInterrupt(0, SW_ISR, CHANGE);
while (1)
{
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
pinMode (LED_Red2, OUTPUT); digitalWrite (LED_Red2, LOW); // LED On
delay (50);
pinMode (LED_Red1, INPUT); // High Impedence LED Off
pinMode (LED_Red2, INPUT); // High Impedence LED Off
delay (450);
pinMode (LED_Green1, OUTPUT); digitalWrite (LED_Green1, LOW); // LED On
pinMode (LED_Green2, OUTPUT); digitalWrite (LED_Green2, LOW); // LED On
delay (50);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
pinMode (LED_Green2, INPUT); // High Impedence LED Off
delay (450);
}
break;
////////////////////////////////////////////
/// WHITE LED ///
////////////////////////////////////////////
case 2:
LED_W_pwr = 2;// minimum led white
analogWrite(LED_White, LED_W_pwr); //0 = OFF & 255 ON
delay (2510); //waitnig for power LED up
while (digitalRead(sw1) == LOW) // adjust white LED power
{
LED_W_pwr += 1;
analogWrite(LED_White, LED_W_pwr); //0 = OFF & 255 ON
delay(50);
if (LED_W_pwr > 240)// max led power
{
analogWrite(LED_White, 0);
delay (500);
analogWrite(LED_White, 240); // max led power
delay (500);
while (digitalRead(sw1) == LOW) {};
break;
}
}
attachInterrupt(0, SW_ISR, CHANGE);
delay (3600000); // 60 min
//diming off//
for (int LED_W_dimer = LED_W_pwr ; LED_W_dimer > 0; LED_W_dimer--) { // 360 = 30 min.
delay (300000/LED_W_pwr);
analogWrite(LED_White, LED_W_dimer);
}
asm volatile (" jmp 0");
break;
////////////////////////////////////////////
/// S O S ///
////////////////////////////////////////////
case 3:
////Serial.println("SOS");
attachInterrupt(0, SW_ISR, CHANGE);
while (1)
{
dot(); dot(); dot(); // S
delay(700);
dash(); dash(); dash(); // O
delay(700);
dot(); dot(); dot(); // S
delay(6000);
}
break;
////////////////////////////////////////////
/// LED RED ///
////////////////////////////////////////////
case 4:
pinMode(LED_Red2, INPUT); // High Impedence LED Off
pinMode (LED_Red1, OUTPUT);//digitalWrite (LED_Red1,LOW); // LED On
analogWrite(LED_Red1, 235);// 15%, 255 = OFF & 0 ON
delay (2000);
if (digitalRead(sw1) == LOW) {
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On full power on
pinMode (LED_Red2, OUTPUT); digitalWrite (LED_Red2, LOW); // LED On
while (digitalRead(sw1) == LOW) {};
attachInterrupt(0, SW_ISR, CHANGE);
delay (3600000); //60 mins
asm volatile (" jmp 0");
}
ADCSRA = 135; //enable analog digi
attachInterrupt(0, SW_ISR, CHANGE);
delay (100);
while (1) {
vSol = analogRead (SolPanel);
//Serial.println(vSol);
if (vSol > 600) { //no sun
asm volatile (" jmp 0");
}
delay (500);
}
break;
////////////////////////////////////////////
/// White Flashing with night ///
////////////////////////////////////////////
case 5:
attachInterrupt(0, SW_ISR, CHANGE);
while (1) {
ADCSRA = 135; //enable analog digi
delay (100);
vSol = analogRead (SolPanel);
if (vSol < 600) { //Volts or no sun
digitalWrite(LED_White, HIGH);
delay(20);// mSec
digitalWrite(LED_White, LOW);
}
pause (2000);// msec
}
break;
////////////////////////////////////////////
/// B A T T E R Y level ///
////////////////////////////////////////////
case 6:
ADCSRA = 135; //enable analog digi
delay (100);
attachInterrupt(0, SW_ISR, CHANGE);
timer = 0;
while (digitalRead(sw1) == HIGH && timer < 4) //stop after n times
{
float p = vcc.Read_Perc(VccMin, VccMax);
//Serial.print (p);
//Serial.println ("%");
V10 = int(p) / 10;
for (int v = 0; v < V10; v++)
{
pinMode (LED_Green1, OUTPUT); digitalWrite (LED_Green1, LOW); // LED On
delay (10);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
delay (650);
}
for (int v = V10; v < 10; v++)
{
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
delay (10);
pinMode (LED_Red1, INPUT); // High Impedence LED Off
delay (650);
}
delay (2000);
timer++;
}
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
while (digitalRead(sw1) == LOW) {}; delay(250);
asm volatile (" jmp 0");
break;
}
}
////////////////////////////////////////////////////////
void dot()
////////////////////////////////////////////////////////
{
analogWrite(LED_White, 160); //0 = OFF & 255 ONdigitalWrite(LED_White, HIGH);
delay(22);
digitalWrite(LED_White, LOW);
delay(500);
}
////////////////////////////////////////////////////////
void dash()
////////////////////////////////////////////////////////
{
analogWrite(LED_White, 20); //0 = OFF & 255 ONdigitalWrite(LED_White, HIGH);
delay(150);
digitalWrite(LED_White, LOW);
delay(800);
}
////////////////////////////////////////////////////////
// sleep Now //
////////////////////////////////////////////////////////
void sleepNow()
{
// disable ADC
ADCSRA = 0;
set_sleep_mode(SLEEP_MODE_PWR_DOWN);//SLEEP_MODE_PWR_SAVE);
interrupts();
attachInterrupt(0, pinInterrupt, HIGH);
sleep_enable();
sleep_mode();
sleep_disable();
}
////////////////////////////////////////////////////////
void pinInterrupt()
////////////////////////////////////////////////////////
{
detachInterrupt(0);
attachInterrupt(0, pinInterrupt, HIGH);
}
////////////////////////////////////////////////////////
// Interrupt Service Routin //
////////////////////////////////////////////////////////
void SW_ISR() {
analogWrite(LED_White, 0);
MCUCR = bit (BODS) | bit (BODSE); // turn off brown-out enable in software
MCUCR = bit (BODS);
pinMode (LED_Green1, INPUT); // High Impedence LED Off
pinMode (LED_Green2, INPUT); // High Impedence LED Off
pinMode (LED_Red1, INPUT); // High Impedence LED Off
pinMode (LED_Red2, INPUT); // High Impedence LED Off
//pinMode(LED_Green1, OUTPUT); digitalWrite (LED_Red1,LOW); // LED On
for (long x = 0; x < 20000; x ++) {
pinMode (LED_Red1, INPUT); // delay
}
pinMode (LED_Red1, OUTPUT); digitalWrite (LED_Red1, LOW); // LED On
while (digitalRead(sw1) == LOW) {};
delay(250);
asm volatile (" jmp 0");
}
/////////////////////////////////////////////////////////////////////
// S L E E P with delay //
/////////////////////////////////////////////////////////////////////
void pause(int WDPset)
{
// disable ADC
ADCSRA = 0;
// clear various "reset" flags
MCUSR = 0;
// allow changes, disable reset
WDTCSR = bit (WDCE) | bit (WDE);
// set interrupt mode and an interval
switch (WDPset) {
case 125:
WDTCSR = bit (WDIE) | bit (WDP1) | bit (WDP0); // set WDIE, and .125 second delay
break;
case 250:
WDTCSR = bit (WDIE) | bit (WDP2); // set WDIE, and .25 second delay
break;
case 500:
WDTCSR = bit (WDIE) | bit (WDP2) | bit (WDP0); // set WDIE, and .5 second delay
break;
case 1000:
WDTCSR = bit (WDIE) | bit (WDP2) | bit (WDP1); // set WDIE, and 1 second delay
break;
case 2000:
WDTCSR = bit (WDIE) | bit (WDP2) | bit (WDP1) | bit (WDP0); // set WDIE, and 2 second delay
break;
case 4000:
WDTCSR = bit (WDIE) | bit (WDP3) ; // set WDIE, and 4 second delay
break;
case 8000:
WDTCSR = bit (WDIE) | bit (WDP3) | bit (WDP0); // set WDIE, and 8 second delay
break;
}
wdt_reset(); // pat the dog
set_sleep_mode (SLEEP_MODE_PWR_DOWN);
noInterrupts (); // timed sequence follows
sleep_enable();
// turn off brown-out enable in software
MCUCR = bit (BODS) | bit (BODSE);
MCUCR = bit (BODS);
interrupts (); // guarantees next instruction executed
sleep_cpu ();
// cancel sleep as a precaution
sleep_disable();
}
ISR (WDT_vect)
{
wdt_disable(); // disable watchdog
} // end of WDT_vect




Comments
Please log in or sign up to comment.