


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 9 | |||
 |
| × | 4 | |||
Software apps and online services | ||||||
 |
| |||||
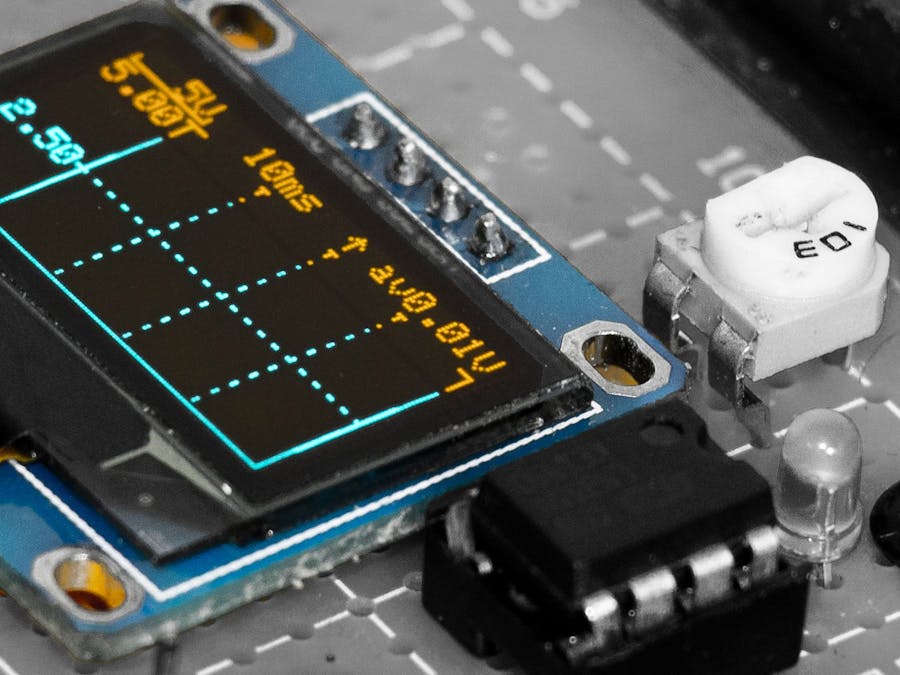
In this video, I will show you how to make your own mini oscilloscope at home. It’s simple and easy to make.its not my own code i just make tutorial for you guys. For the purpose of making this project, I had depended on the third party source code, which link is given below. If you have any question or suggestion, please feel free to comment in my youtube video and please don’t forget to like and subscribe to my YouTube channel.
Click here for full tutorial and source code.
My IG : https://www.instagram.com/pm.goharian/
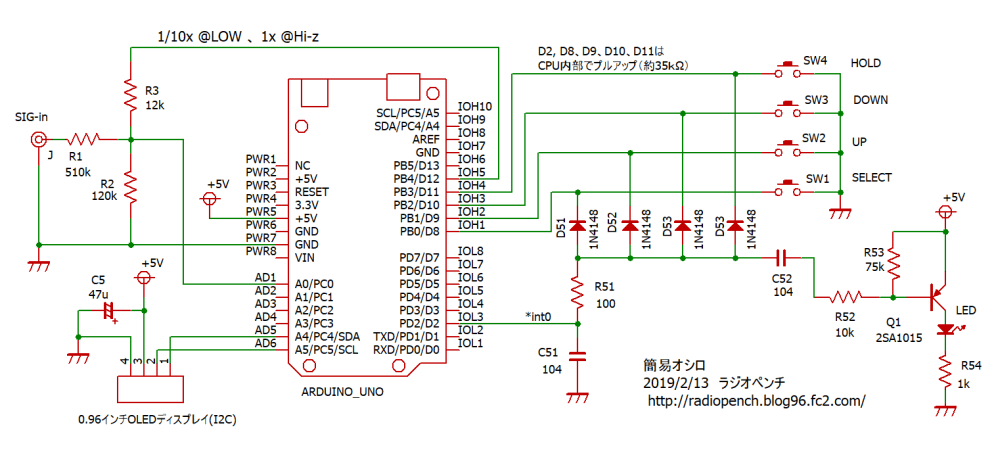
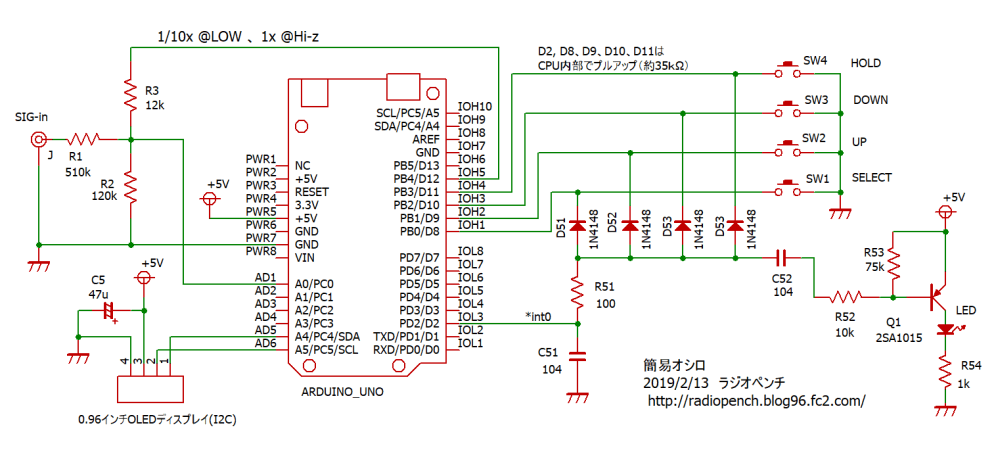
Components needed- Arduino Nano
- SSD1306 OLED display
- 1N4148
- Microswitch
- 104 capacitor
- Resistors: 100Ω, 12k, 120k, 510k
An ‘oscilloscope’, previously called an ‘oscillograph’, and informally known as a scope or o-scope,CRO (for cathode-ray oscilloscope), or DSO (for the more modern digital storage oscilloscope), is a type of electronic test instrument that graphically displays varying signal [voltages], usually as a two-dimensional plot of one or more signals as a function of time. Other signals (such as sound or vibration) can be converted to voltages and displayed.
Oscilloscopes display the change of an electrical signal over time, with voltage and time as the Y- and X-axes, respectively, on a calibrated scale. The waveform can then be analyzed for properties such as amplitude, frequency, rise time, time interval, distortion, and others. Modern digital instruments may calculate and display these properties directly. Originally, calculation of these values required manually measuring the waveform against the scales built into the screen of the instrument.
Note: Make sure all the connections in your circuit are exactly the same as in schematics.
reference :
/*
(_20190212_OLEDoscilloscope.ino)
1285byte ram free
2019/02/12
*/
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <avr/pgmspace.h> // PROGMEM
#include <EEPROM.h>
#define SCREEN_WIDTH 128 // OLED display width
#define SCREEN_HEIGHT 64 // OLED display height
#define REC_LENGTH 200 //
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
#define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
//
const char vRangeName[10][5] PROGMEM = {"A50V", "A 5V", " 50V", " 20V", " 10V", " 5V", " 2V", " 1V", "0.5V", "0.2V"}; // \0
const char * const vstring_table[] PROGMEM = {vRangeName[0], vRangeName[1], vRangeName[2], vRangeName[3], vRangeName[4], vRangeName[5], vRangeName[6], vRangeName[7], vRangeName[8], vRangeName[9]};
const char hRangeName[8][6] PROGMEM = {" 50ms", " 20ms", " 10ms", " 5ms", " 2ms", " 1ms", "500us", "200us"}; // (48
const char * const hstring_table[] PROGMEM = {hRangeName[0], hRangeName[1], hRangeName[2], hRangeName[3], hRangeName[4], hRangeName[5], hRangeName[6], hRangeName[7]};
int waveBuff[REC_LENGTH]; // (RAM)
char chrBuff[10]; //
String hScale = "xxxAs";
String vScale = "xxxx";
float lsb5V = 0.0055549; // 5V0.005371 V/1LSB
float lsb50V = 0.051513; // 50V 0.05371
volatile int vRange; // 0:A50V, 1:A 5V, 2:50V, 3:20V, 4:10V, 5:5V, 6:2V, 7:1V, 8:0.5V
volatile int hRange; // 0:50m, 1:20m, 2:10m, 3:5m, 4;2m, 5:1m, 6:500u, 7;200u
volatile int trigD; // 0:1:
volatile int scopeP; // 0:, 1:, 2:
volatile boolean hold = false; //
volatile boolean paraChanged = false; // true
volatile int saveTimer; // EEPROM
int timeExec; // (ms)
int dataMin; // (min:0)
int dataMax; // (max:1023)
int dataAve; // 10 max:10230)
int rangeMax; //
int rangeMin; //
int rangeMaxDisp; // max100
int rangeMinDisp; // min
int trigP; //
boolean trigSync; //
int att10x; // 1
void setup() {
pinMode(2, INPUT_PULLUP); // (int0
pinMode(8, INPUT_PULLUP); // Select
pinMode(9, INPUT_PULLUP); // Up
pinMode(10, INPUT_PULLUP); // Down
pinMode(11, INPUT_PULLUP); // Hold
pinMode(12, INPUT); // 1/10
pinMode(13, OUTPUT); //
// Serial.begin(115200); // RAM
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x64
// Serial.println(F("SSD1306 failed"));
for (;;); // Don't proceed, loop forever
}
loadEEPROM(); // EEPROM
analogReference(INTERNAL); // ADC1.1Vvref)
attachInterrupt(0, pin2IRQ, FALLING); //
startScreen(); //
}
void loop() {
digitalWrite(13, HIGH);
setConditions(); // RAM40
readWave(); // (1.6ms )
digitalWrite(13, LOW); //
dataAnalize(); // (0.4-0.7ms)
writeCommonImage(); // (4.6ms)
plotData(); // (5.4ms+)
dispInf(); // (6.2ms)
display.display(); // (37ms)
saveEEPROM(); // EEPROM
while (hold == true) { // Hold
dispHold();
delay(10);
}
}
void setConditions() { //
// PROGMEM
strcpy_P(chrBuff, (char*)pgm_read_word(&(hstring_table[hRange]))); //
hScale = chrBuff; // hScale
//
strcpy_P(chrBuff, (char*)pgm_read_word(&(vstring_table[vRange]))); //
vScale = chrBuff; // vScale
switch (vRange) { //
case 0: { // Auto50V
// rangeMax = 1023;
// rangeMin = 0;
att10x = 1; //
break;
}
case 1: { // Auto 5V
// rangeMax = 1023;
// rangeMin = 0;
att10x = 0; //
break;
}
case 2: { // 50V
rangeMax = 50 / lsb50V; //
rangeMaxDisp = 5000; // 100
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 3: { // 20V
rangeMax = 20 / lsb50V; //
rangeMaxDisp = 2000;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 4: { // 10V
rangeMax = 10 / lsb50V; //
rangeMaxDisp = 1000;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 1; //
break;
}
case 5: { // 5V
rangeMax = 5 / lsb5V; //
rangeMaxDisp = 500;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 6: { // 2V
rangeMax = 2 / lsb5V; //
rangeMaxDisp = 200;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 7: { // 1V
rangeMax = 1 / lsb5V; //
rangeMaxDisp = 100;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 8: { // 0.5V
rangeMax = 0.5 / lsb5V; //
rangeMaxDisp = 50;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
case 9: { // 0.5V
rangeMax = 0.2 / lsb5V; //
rangeMaxDisp = 20;
rangeMin = 0;
rangeMinDisp = 0;
att10x = 0; //
break;
}
}
}
void writeCommonImage() { //
display.clearDisplay(); // (0.4ms)
display.setTextColor(WHITE); //
display.setCursor(86, 0); // Start at top-left corner
display.println(F("av V")); // 1
display.drawFastVLine(26, 9, 55, WHITE); //
display.drawFastVLine(127, 9, 55, WHITE); //
display.drawFastHLine(24, 9, 7, WHITE); // Max
display.drawFastHLine(24, 36, 2, WHITE); //
display.drawFastHLine(24, 63, 7, WHITE); //
display.drawFastHLine(51, 9, 3, WHITE); // Max
display.drawFastHLine(51, 63, 3, WHITE); //
display.drawFastHLine(76, 9, 3, WHITE); // Max
display.drawFastHLine(76, 63, 3, WHITE); //
display.drawFastHLine(101, 9, 3, WHITE); // Max
display.drawFastHLine(101, 63, 3, WHITE); //
display.drawFastHLine(123, 9, 5, WHITE); // Max
display.drawFastHLine(123, 63, 5, WHITE); //
for (int x = 26; x <= 128; x += 5) {
display.drawFastHLine(x, 36, 2, WHITE); // ()
}
for (int x = (127 - 25); x > 30; x -= 25) {
for (int y = 10; y < 63; y += 5) {
display.drawFastVLine(x, y, 2, WHITE); // 3
}
}
}
void readWave() { //
if (att10x == 1) { // 1/10
pinMode(12, OUTPUT); //
digitalWrite(12, LOW); // LOW
} else { //
pinMode(12, INPUT); // Hi-z
}
switch (hRange) { //
case 0: { // 50ms
timeExec = 400 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(1888); //
}
break;
}
case 1: { // 20ms
timeExec = 160 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(688); //
}
break;
}
case 2: { // 10 ms
timeExec = 80 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(288); //
}
break;
}
case 3: { // 5 ms
timeExec = 40 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x07; // 128 (arduino
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 112s
delayMicroseconds(88); //
}
break;
}
case 4: { // 2 ms
timeExec = 16 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x06; // 64 (0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 56s
delayMicroseconds(24); //
}
break;
}
case 5: { // 1 ms
timeExec = 8 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x05; // 16 (0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 28s
delayMicroseconds(12); //
}
break;
}
case 6: { // 500us
timeExec = 4 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x04; // 16(0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) { // 200
waveBuff[i] = analogRead(0); // 16s
delayMicroseconds(4); //
// 1.875snop 110.0625s @16MHz)
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop");
}
break;
}
case 7: { // 200us
timeExec = 2 + 50; // (ms) EEPROM
ADCSRA = ADCSRA & 0xf8; // 3
ADCSRA = ADCSRA | 0x02; // :4(0x1=2, 0x2=4, 0x3=8, 0x4=16, 0x5=32, 0x6=64, 0x7=128)
for (int i = 0; i < REC_LENGTH; i++) {
waveBuff[i] = analogRead(0); // 6s
// 1.875snop 110.0625s @16MHz)
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
}
break;
}
}
}
void dataAnalize() { //
int d;
long sum = 0;
//
dataMin = 1023; //
dataMax = 0; //
for (int i = 0; i < REC_LENGTH; i++) { //
d = waveBuff[i];
sum = sum + d;
if (d < dataMin) { //
dataMin = d;
}
if (d > dataMax) { //
dataMax = d;
}
}
//
dataAve = (sum + 10) / 20; // 10
// max,min
if (vRange <= 1) { // Auto1
rangeMin = dataMin - 20; // -20
rangeMin = (rangeMin / 10) * 10; // 10
if (rangeMin < 0) {
rangeMin = 0; // 0
}
rangeMax = dataMax + 20; // +20
rangeMax = ((rangeMax / 10) + 1) * 10; // 10
if (rangeMax > 1020) {
rangeMax = 1023; // 10201023
}
if (att10x == 1) { //
rangeMaxDisp = 100 * (rangeMax * lsb50V); // ADC
rangeMinDisp = 100 * (rangeMin * lsb50V); //
} else { //
rangeMaxDisp = 100 * (rangeMax * lsb5V);
rangeMinDisp = 100 * (rangeMin * lsb5V);
}
} else { //
//
}
//
for (trigP = ((REC_LENGTH / 2) - 51); trigP < ((REC_LENGTH / 2) + 50); trigP++) { //
if (trigD == 0) { // 0
if ((waveBuff[trigP - 1] < (dataMax + dataMin) / 2) && (waveBuff[trigP] >= (dataMax + dataMin) / 2)) {
break; //
}
} else { // 0
if ((waveBuff[trigP - 1] > (dataMax + dataMin) / 2) && (waveBuff[trigP] <= (dataMax + dataMin) / 2)) {
break;
} //
}
}
trigSync = true;
if (trigP >= ((REC_LENGTH / 2) + 50)) { //
trigP = (REC_LENGTH / 2);
trigSync = false; // Unsync
}
}
void startScreen() { //
display.clearDisplay();
display.setTextSize(1); // 2
display.setTextColor(WHITE); //
display.setCursor(10, 25); //
display.println(F("PM.GOHARIAN")); //
display.setCursor(10, 45); //
display.println(F("Pen oscope"));
display.display(); //
delay(5000);
display.clearDisplay();
display.setTextSize(1); //
}
void dispHold() { // Hold
display.fillRect(32, 12, 24, 8, BLACK); // 4
display.setCursor(32, 12);
display.print(F("Hold")); // Hold
display.display(); //
}
void dispInf() { //
float voltage;
//
display.setCursor(2, 0); //
display.print(vScale); //
if (scopeP == 0) { //
display.drawFastHLine(0, 7, 27, WHITE); //
display.drawFastVLine(0, 5, 2, WHITE);
display.drawFastVLine(26, 5, 2, WHITE);
}
//
display.setCursor(34, 0); //
display.print(hScale); // (time/div)
if (scopeP == 1) { //
display.drawFastHLine(32, 7, 33, WHITE); //
display.drawFastVLine(32, 5, 2, WHITE);
display.drawFastVLine(64, 5, 2, WHITE);
}
//
display.setCursor(75, 0); //
if (trigD == 0) {
display.print(char(0x18)); //
} else {
display.print(char(0x19)); //
}
if (scopeP == 2) { //
display.drawFastHLine(71, 7, 13, WHITE); //
display.drawFastVLine(71, 5, 2, WHITE);
display.drawFastVLine(83, 5, 2, WHITE);
}
//
if (att10x == 1) { // 10
voltage = dataAve * lsb50V / 10.0; // 50V
} else {
voltage = dataAve * lsb5V / 10.0; // 5V
}
dtostrf(voltage, 4, 2, chrBuff); // x.xx
display.setCursor(98, 0); //
display.print(chrBuff); //
// display.print(saveTimer); //
//
voltage = rangeMaxDisp / 100.0; // Max
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // *.**
} else { //
dtostrf(voltage, 4, 1, chrBuff); // **.*
}
display.setCursor(0, 9);
display.print(chrBuff); // Max
voltage = (rangeMaxDisp + rangeMinDisp) / 200.0; //
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // 2
} else { //
dtostrf(voltage, 4, 1, chrBuff); // 1
}
display.setCursor(0, 33);
display.print(chrBuff); //
voltage = rangeMinDisp / 100.0; // Min
if (vRange == 1 || vRange > 4) { // 5VAuto5V
dtostrf(voltage, 4, 2, chrBuff); // 2
} else {
dtostrf(voltage, 4, 1, chrBuff); // 1
}
display.setCursor(0, 57);
display.print(chrBuff); // Min
//
if (trigSync == false) { //
display.setCursor(60, 55); //
display.print(F("Unsync")); // Unsync
}
}
void plotData() { //
long y1, y2;
for (int x = 0; x <= 98; x++) {
y1 = map(waveBuff[x + trigP - 50], rangeMin, rangeMax, 63, 9); //
y1 = constrain(y1, 9, 63); //
y2 = map(waveBuff[x + trigP - 49], rangeMin, rangeMax, 63, 9); //
y2 = constrain(y2, 9, 63); //
display.drawLine(x + 27, y1, x + 28, y2, WHITE); //
}
}
void saveEEPROM() { // EEPROM
if (paraChanged == true) { //
saveTimer = saveTimer - timeExec; //
if (saveTimer < 0) { //
paraChanged = false; //
EEPROM.write(0, vRange); //
EEPROM.write(1, hRange);
EEPROM.write(2, trigD);
EEPROM.write(3, scopeP);
}
}
}
void loadEEPROM() { // EEPROM
int x;
x = EEPROM.read(0); // vRange
if ((x < 0) || (x > 9)) { // 0-9
x = 3; //
}
vRange = x;
x = EEPROM.read(1); // hRange
if ((x < 0) || (x > 7)) { // 0-9
x = 3; //
}
hRange = x;
x = EEPROM.read(2); // trigD
if ((x < 0) || (x > 1)) { // 0-9
x = 1; //
}
trigD = x;
x = EEPROM.read(3); // scopeP
if ((x < 0) || (x > 2)) { // 0-9
x = 1; //
}
scopeP = x;
}
void pin2IRQ() { // Pin2(int0)
//pin8,9,10,11Pin2
//
int x; //
x = PINB; // B
if ( (x & 0x07) != 0x07) { // 3High
saveTimer = 5000; // EEPROM(ms
paraChanged = true; // ON
}
if ((x & 0x01) == 0) {
scopeP++;
if (scopeP > 2) {
scopeP = 0;
}
}
if ((x & 0x02) == 0) { // UP
if (scopeP == 0) { //
vRange++;
if (vRange > 9) {
vRange = 9;
}
}
if (scopeP == 1) { //
hRange++;
if (hRange > 7) {
hRange = 7;
}
}
if (scopeP == 2) { //
trigD = 0; //
}
}
if ((x & 0x04) == 0) { // DOWN
if (scopeP == 0) { //
vRange--;
if (vRange < 0) {
vRange = 0;
}
}
if (scopeP == 1) { //
hRange--;
if (hRange < 0) {
hRange = 0;
}
}
if (scopeP == 2) { //
trigD = 1; //
}
}
if ((x & 0x08) == 0) { // HOLD
hold = ! hold; //
}
}




{kind=link}
Comments
Please log in or sign up to comment.