In the previous tutorial, I've been explaining the basics about L298N Motor Driver, let's see how much it's useful in robotics.
When we build/design a robotic system we need to make sure we get 5 essential things straight :
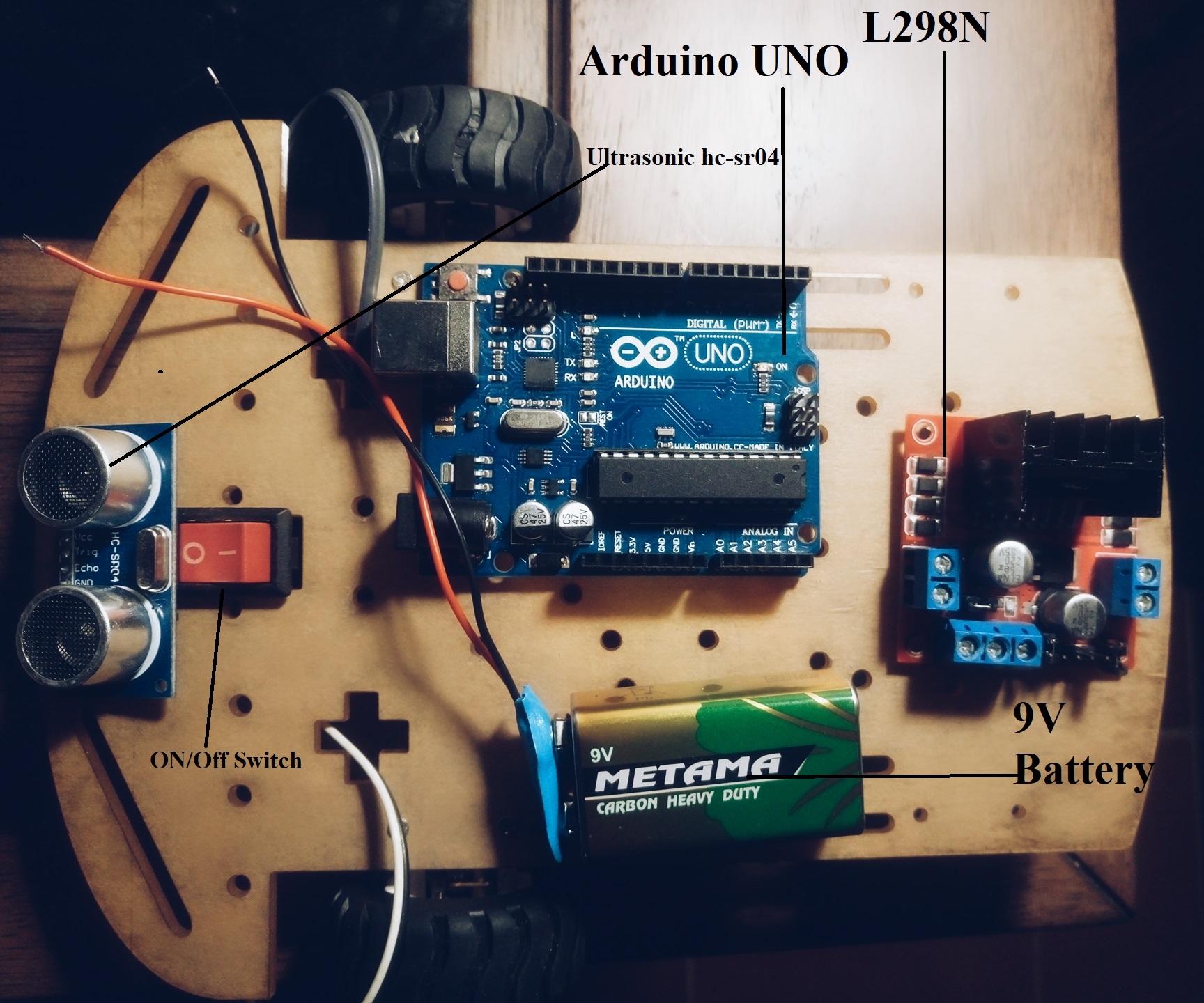
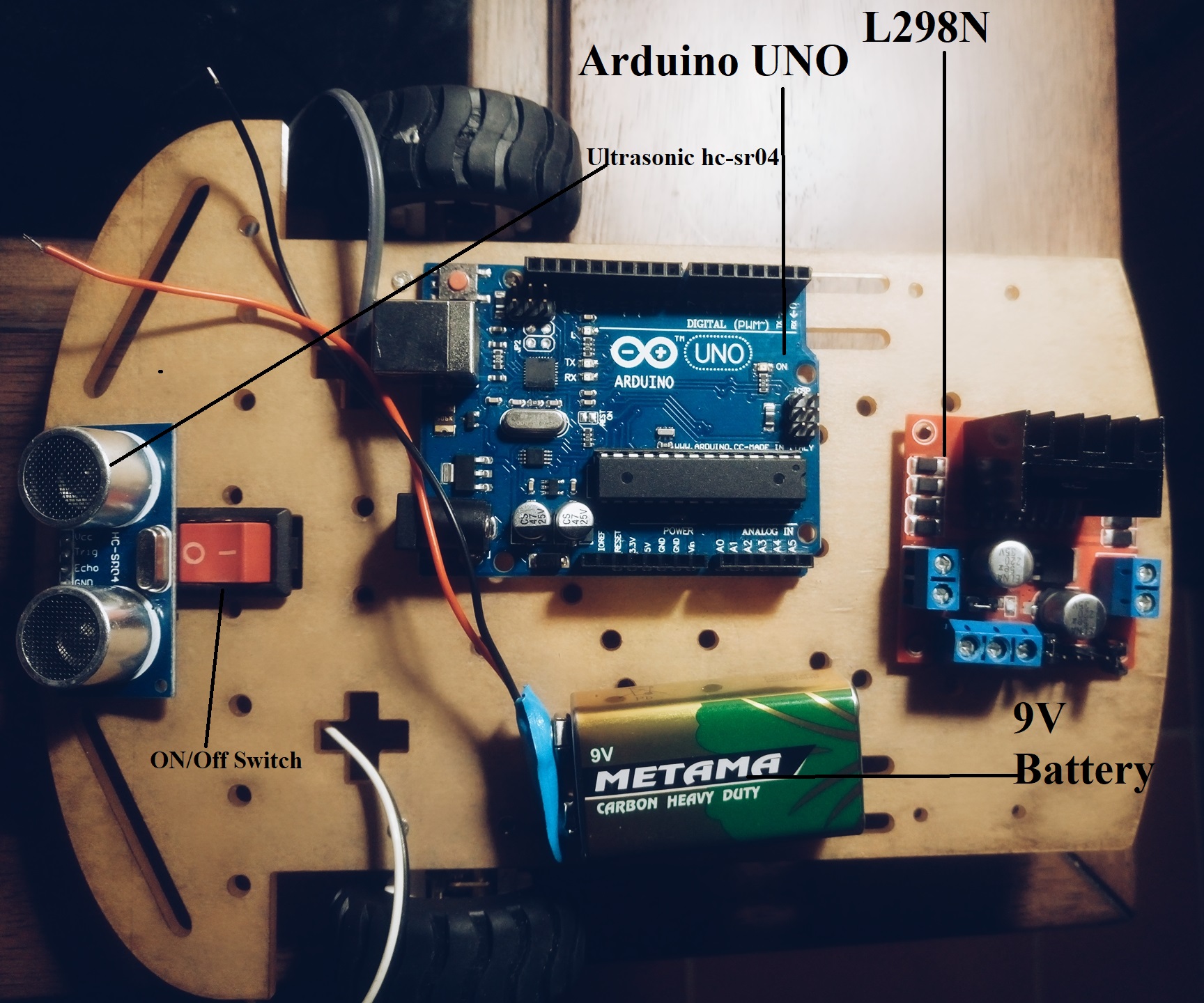
First,The Task & the functionality, in our example the task is vacuuming and the functionality required in order to reach the task properly is avoiding obstacles so let's focus on this functionality and get it done properly.
Second, The Parameter at the input and the sensor responsible about collecting it's data, we need to make sure we know which parameter is involved and then we need to purchase the adequate sensor to collect it's data, in our example the parameter required is the obstacle and the adequate sensor is an ultrasonic range finder that I've already explained it's basics on my first tutorial.
Third, the brain ! after collecting data there's a need for data processing, choosing the optimal brain technology for that is kinda tricky sometimes, in our case we only need a micro-controller to perform one task like an arduino uno !
Fourth, the actuators at the output, in our case it's clearly Motors, after processing the data collected by the micro-controller from the sensor, it's time that the micro-controller order the actuators to " make a move " and that's depends on when we programmers decided to ! isn't a great job to be a programmer ?!
Fifth , Power !!! and that's will lead us to read datasheets in order to calculate how much voltage we need and in which form is suitable, in our case a 9V battery is suitable regarding the voltage drop of L298N and arduino uno, i've already explained the working of L298N in one of my previous tutorials.
Finally, all the things above need to be on the Chassis of the robot ! so get your hands dirty a little !




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








_iDcysEjmBl.bmp)

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
_iDcysEjmBl.bmp){kind=link}
Comments
Please log in or sign up to comment.